【嵌入式Linux驱动开发】十四、了解Linux内核定时器使用流程,实现LED闪烁
致敬英雄!
文章目录
- 一、Linux内核定时器初探
- 1.1、图形界面配置系统节拍率
- 1.2、重要全局变量`jiffies`
- 1.3、内核定时器中断
- 1.4、ioctl 简单介绍
- 1.4.1 应用程序 ioctl 函数
- 1.4.2 驱动程序 ioctl 函数
- 1.4.3 ioctl 命令构成
- 1.4.4 构造ioctl命令
- 1.4.5 解析 ioctl 命令
- 二、编写代码
- 2.1 修改、编译、覆盖设备树文件
- 2.2 驱动程序编写
- 2.2 应用程序编写
- 三、运行程序
一、Linux内核定时器初探
1.1、图形界面配置系统节拍率
中断周期性产生的频率就是系统频率,也叫做节拍率(tick rate),单位是 Hz。系统节拍率是可以设置的,在编译 Linux 内核的时候可以通过图形化界面设置系统节拍率。
- 进入Linux内核源码目录,终端输入
make menuconfig,依次选择Kernel Features -> Timer frequency,切换到100Hz,按下空格,进行选中!
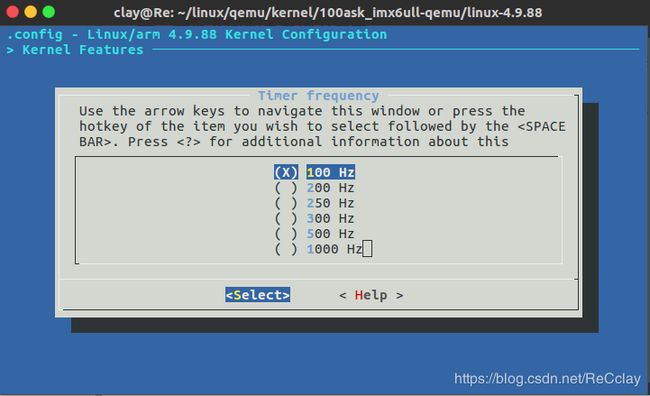
- 设置好之后,保存退出。在内核源码根目录,查看.cofig文件内容,可以看到有如下宏定义!

1.2、重要全局变量jiffies
在上一步,我们采用了 100Hz 的节拍率,这样时间精度就是 10ms。不管是 32 位的系统还是 64 位系统,都可以使用 jiffies来记录系统从启动以来的系统节拍数。(初始化默认为0)
100HZ 表示1秒有100个节拍, jiffies 表示系统运行的总节拍数。那么后者除以前者,即可得到系统的运行时间。不管是 32 位还是 64 位的 jiffies,都有溢出的风险,溢出以后会重新从 0 开始计数,相当于绕回来了,因此该现象称之为绕回现象。处理 jiffies 的绕回显得尤为重要,Linux 内核提供了如下表所示的几个 API 函数来处理绕回。
| 函数 | 描述 |
|---|---|
| time_after(unkown, known) | unkown > kown,返回真 |
| time_before(unkown, known) | unkown < kown,返回真 |
| time_after_eq(unkown, known) | unkown ≥ kown,返回真 |
| time_before_eq(unkown, known) | unkown ≤ kown,返回真 |
注:表中的unkown 通常为 jiffies, known 通常是需要对比的值。
为了方便开发, Linux 内核提供了几个 jiffies 和 ms、 us、 ns 之间的转换函数,如下表
| 函数 | 描述 |
|---|---|
| int jiffies_to_msecs(const unsigned long j) | jiffies转化为对应的ms |
| int jiffies_to_usecs(const unsigned long j) | jiffies转化为对应的us |
| u64 jiffies_to_nsecs(const unsigned long j) | jiffies转化为对应的ns |
| long msecs_to_jiffies(const unsigned int m) | ms转化为对应的jiffies |
| long usecs_to_jiffies(const unsigned int u) | us转化为对应的jiffies |
| unsigned long nsecs_to_jiffies(u64 n) | ns转化为对应的jiffies |
这里再补充一下Linux 内核短延时函数
| 函数 | 描述 |
|---|---|
| void ndelay(unsigned long nsecs) | ns延时 |
| void udelay(unsigned long usecs) | us延时 |
| void mdelay(unsigned long mseces) | ms延时 |
1.3、内核定时器中断
Linux 内核定时器使用很简单,只需要提供超时时间(相当于定时值)和定时处理函数即可,当超时时间到了以后设置的定时处理函数就会执行。要注意一点,内核定时器并不是周期性运行的,超时以后就会自动关闭,因此如果想要实现周期性定时,那么就需要在定时处理函数中重新开启定时器。
Linux 内核使用 timer_list 结构体表示内核定时器,定义如下
struct timer_list {
struct list_head entry;
unsigned long expires; /* 定时器超时时间,单位是节拍数 */
struct tvec_base *base;
void (*function)(unsigned long); /* 定时处理函数 */
unsigned long data; /* 要传递给 function 函数的参数 */
int slack;
};
比如我们要定义一个周期为2s的定时器,那么expires = jiffies + msecs_to_jiffies(timerperiod),
定时器相关API函数
| 函数 | 描述 |
|---|---|
| init_timer | 初始化 timer_list 类型变量 |
| add_timer | 向 Linux 内核注册定时器 |
| del_timer | 删除一个定时器(不管有没有激活,立即删除)(不常用) |
| del_timer_sync | 使用完定时器再删除,不能使用在中断上下文 |
| mod_timer | 修改定时值(会激活定时器,一般放到中断函数尾,用于周期定时) |
使用流程
struct timer_list timer; /* 定义定时器 */
/* 定时器回调函数 */
void function(unsigned long arg)
{
/*
* 定时器处理代码
*/
/* 如果需要定时器周期性运行的话就使用 mod_timer
* 函数重新设置超时值并且启动定时器。
*/
mod_timer(&dev->timertest, jiffies + msecs_to_jiffies(2000));
}
/* 初始化函数 */
void init(void)
{
init_timer(&timer); /* 初始化定时器 */
timer.function = function; /* 设置定时处理函数 */
timer.expires=jffies + msecs_to_jiffies(2000);/* 超时时间 2 秒 */
timer.data = (unsigned long)&dev; /* 将设备结构体作为参数 */
add_timer(&timer); /* 启动定时器 */
}
/* 退出函数 */
void exit(void)
{
del_timer(&timer); /* 删除定时器 */
/* 或者使用 */
del_timer_sync(&timer);
}
1.4、ioctl 简单介绍
ioctl 系统调用主要用于增加系统调用的硬件控制能力,它可以构建自己的命令,也能接受参数。通过 ioctl 控制硬件 I/O,必须在驱动中为 ioctl()系统调用设计一些控制命令,通过不同的命令实现不同的硬件控制。更加深入研究,可参考<这里>。
1.4.1 应用程序 ioctl 函数
用户空间的 ioctl 函数原型如下所示,
int ioctl (int fd, unsigned long cmd, ...)
- fd 是被打开的设备文件, cmd 是操作设备的命令,“ …”代表可变数目的参数表,通常用 char *argp 来定义,如果 cmd 命令不需要参数,则传入 NULL 即可。
1.4.2 驱动程序 ioctl 函数
内核空间 iotcl 函数原型如下所示,定义的 ioctl 命令通过 cmd 传递,数据通过 arg 传递。驱动得到 cmd 命令和 arg 参数后,须首先用解析 ioctl 命令的宏定义对命令和参数进行解析判断,没有问题再进行后续处理。
int (*ioctl) (struct inode *inode, struct file *filp, unsigned int cmd, unsigned long arg);
- filp 表示文件描述符,cmd表示命令,arg表示与命令相关的参数,至于参数具体表达什么含义,完全由驱动编写者来定义。
1.4.3 ioctl 命令构成
ioctl 操作与硬件平台相关,使用 ioctl 的驱动需要包含

例如,0x82187201,它的二进制如下表所示。所以含义为:读:_IOR;参数长度536;幻数114,ASCII为r,功能号1.
| 字段 | 31~30 | 29~16 | 15~8 | 7~0 |
|---|---|---|---|---|
| 二进制 | 10 | 00 0010 0001 1000 | 0111 0010 | 0000 0001 |
实际上这个命令是#define VFAT_IOCTL_READDIR_BOTH _IOR('r', 1, struct __fat_dirent[2])
1.4.4 构造ioctl命令
为驱动构造 ioctl 命令,首先要为驱动选择一个可用的幻数作为驱动的特征码,以区分不同驱动的命令。内核已经使用了很多幻数,为了防止冲突,最好不要再使用这些系统已经占用的幻数来作为驱动的特征码。已经被使用的幻数列表详见内核源码目录Documentation/ioctl/ioctl-number.txt文件。
在不同平台上,幻数所使用情况都不同,为防止冲突,可以选择其它平台使用的幻数来用。选定幻数后,可以这样来进行定义:
#define LED_IOC_MAGIC 'Z'
ioctl 命令字段的 bit[31:30]表示命令的方向,分别表示使用_IO、 _IOW、 _IOR 和_IOWR
这几个宏定义,分别用于构造不同的命令,具体见下表:
| 命令 | 描述 |
|---|---|
| _IO(type,nr) | 构造无参数的命令编号 |
| _IOW(type,nr,size) | 构造往驱动写入数据的命令编号 |
| _IOR(type,nr,size) | 构造从驱动中读取数据的命令编号 |
| _IOWR(type,nr,size) | 构造双向传输的命令编号 |
其中, type 是幻数, nr 是功能号, size 是数据大小。
例如,为 LED 驱动构造 ioctl 命令,由于控制 LED 无需数据传输,可以这样定义:
#define SET_LED_ON _IO(LED_IOC_MAGIC, 0)
#define SET_LED_OFF _IO(LED_IOC_MAGIC, 1)
例如,如果想在 ioctl 中往驱动写入一个 int 型的数据,可以这样定义:
#define CHAR_WRITE_DATA _IOW(CHAR_IOC_MAGIC, 2, int)
例如,要从驱动中读取 int 型的数据,则定义为:
#define CHAR_READ_DATA _IOR(CHAR_IOC_MAGIC, 3, int)
注意:同一份驱动的 ioctl 命令定义,无论有无数据传输以及数据传输方向是否相同,各命令的序号都不能相同
定义完全部所需命令后,还需定义一个命令的最大的编号,防止传入参数超过编号范围。
1.4.5 解析 ioctl 命令
驱动程序必须对传入的命令进行解析,包括传输方向、命令类型、命令编号以及参数大
小,分别可以通过下表的宏定义完成:
| 宏定义 | 描述 |
|---|---|
| _IOC_DIR(nr) | 解析命令的传输方向 |
| _IOC_TYPE(nr) | 解析命令类型 |
| _IOC_NR(nr) | 解析命令序号 |
| _IOC_SIZE(nr) | 解析参数大小 |
如果解析发现命令出错,可以返回-ENOTTY,如:
if (_IOC_TYPE(cmd) != LED_IOC_MAGIC) {
return -ENOTTY;
}
if (_IOC_NR(cmd) >= LED_IOC_MAXNR) {
return -ENOTTY;
}
二、编写代码
2.1 修改、编译、覆盖设备树文件
参考第九节内容。
2.2 驱动程序编写
这一次将驱动程序的框架又完善了一下,认真体会!
leddrv.c
#include 需要说明的:
-
①、灯的状态
- 设备树中设置低电平有效,打开-红色-写1 关闭-白色-写0
-
②、使用自旋锁
- 取出定时周期值的时候,timerperiod = dev->timeperiod;
- 设置定时周期的时候,dev->timeperiod = arg;
-
③、ioctl
- 幻数0xEF,对应十进制239,对应ASCII为符号
'∩'!(不是小写字母n,数学符号交集) - 驱动程序中,为了方便并没有做解析,而是直接
switch-case选择!
- 幻数0xEF,对应十进制239,对应ASCII为符号
-
④、私有数据
- 一般在open的时候将file结构体中的private_data指向设备结构体,即设置私有数据!
-
⑤、修改定时器
- 修改定时器会激活定时器
- msecs_to_jiffies转换系统节拍的时候,借助的是第三方变量,而没有直接操作
dev->timeperiod
-
⑥、强制转化
- 程序中涉及到结构体和unsigned long的转化,注意体会思想,也可参考<这篇>文章里的强制转化进行理解!
-
所有LED相关的放到了一个设备结构体里,然后引入私有数据的思想,值得认真体会!
2.2 应用程序编写
ledtest.c
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
#include "linux/ioctl.h"
/* 命令值 */
#define CLOSE_CMD (_IO(0XEF, 0x1)) /* 关闭定时器 */
#define OPEN_CMD (_IO(0XEF, 0x2)) /* 打开定时器 */
#define SETPERIOD_CMD (_IO(0XEF, 0x3)) /* 设置定时器周期命令 */
int main(int argc, char **argv)
{
int fd, ret;
char *filename;
unsigned int cmd;
unsigned int arg;
unsigned char str[100];
if (argc != 2) {
printf("Error Usage!\r\n");
return -1;
}
filename = argv[1];
fd = open(filename, O_RDWR);
if (fd < 0) {
printf("Can't open file %s\r\n", filename);
return -1;
}
while (1) {
printf("Input CMD:");
ret = scanf("%d", &cmd);
if (ret != 1) { /* 参数输入错误 */
gets(str); /* 防止卡死 */
}
if(cmd == 1) /* 关闭LED灯 */
cmd = CLOSE_CMD;
else if(cmd == 2) /* 打开LED灯 */
cmd = OPEN_CMD;
else if(cmd == 3) {
cmd = SETPERIOD_CMD; /* 设置周期值 */
printf("Input Timer Period:");
ret = scanf("%d", &arg);
if (ret != 1) { /* 参数输入错误 */
gets(str); /* 防止卡死 */
}
}
ioctl(fd, cmd, arg); /* 控制定时器的打开和关闭 */
}
close(fd);
}
需要说明的
- gets的加入可能会让程序编译的时候有警告,忽略即可!
- 实现功能
- 输入 1 表示关闭定时器
- 输入 2 表示打开定时器
- 输入 3 设置定时器周期
- 选择设置定时器周期的话,接着需要输入设置的周期值,单位为毫秒
三、运行程序
编译程序没有问题后,运行qemu虚拟开发板,并做好准备工作!将
- 拷贝led.ko和ledtest到NFS中
cp *.ko ledtest ~/linux/qemu/NFS/
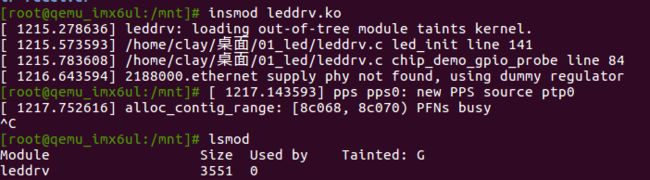
- 在qemu终端,加载led.ko文件
insmod leddrv.ko
在qemu中加载最后一个模块时,会出现下面的提示信息,但是ctrl+c之后,似乎测试还是可以用的,不知道是怎么回事。知道的朋友,可以在下面留言一起探讨!
- 在qemu终端,运行应用程序
./ledtest /dev/led
同时,可以看到,qemu模拟板的第一个小灯,又白色变成红色表示打开。同时终端会提示让继续输入命令,我们尝试输入2,打开定时器,观察小灯闪烁!【无法录屏,这里就不放图了】
接着输入1,关闭定时器,取消LED闪烁!
最后输入3,自定义LED闪烁时间为2000ms!
大功告成,还是很完美的!