米尔科技Zynq pl中断的linux驱动
一.目标
在米尔科技zynq的开发平台上,通过zynq的按键开关,实现pl中断。
二.分析
原理图
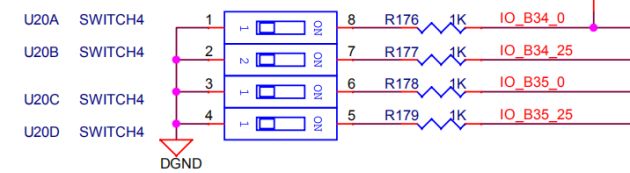
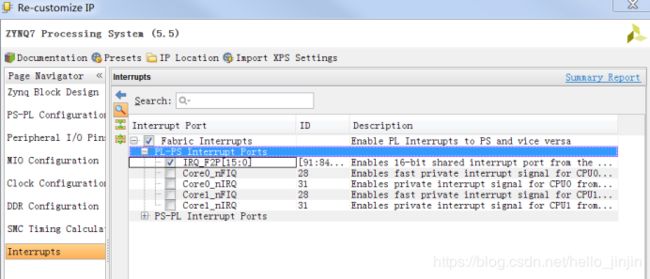
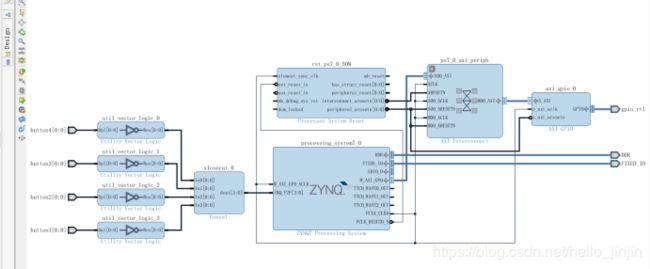
挂在pl端,需要在vivado上进行引脚锁定。配置如下
当然可以通过中断函数操作三色灯,也可以不用管三色灯了,在中断中打印信息也可证明进入中断了。
三.代码实现
引脚限制文件
set_property PACKAGE_PIN R14 [get_ports {gpio_rtl_tri_o[0]}]
set_property PACKAGE_PIN Y16 [get_ports {gpio_rtl_tri_o[1]}]
set_property PACKAGE_PIN Y17 [get_ports {gpio_rtl_tri_o[2]}]
set_property IOSTANDARD LVCMOS33 [get_ports {gpio_rtl_tri_o[2]}]
set_property IOSTANDARD LVCMOS33 [get_ports {gpio_rtl_tri_o[1]}]
set_property IOSTANDARD LVCMOS33 [get_ports {gpio_rtl_tri_o[0]}]
set_property PACKAGE_PIN R19 [get_ports {button1}]
set_property IOSTANDARD LVCMOS33 [get_ports {button1}]
set_property PACKAGE_PIN T19 [get_ports {button2}]
set_property IOSTANDARD LVCMOS33 [get_ports {button2}]
set_property PACKAGE_PIN G14 [get_ports {button3}]
set_property IOSTANDARD LVCMOS33 [get_ports {button3}]
set_property PACKAGE_PIN J15 [get_ports {button4}]
set_property IOSTANDARD LVCMOS33 [get_ports {button4}]
中断驱动程序
#include 测试程序
#include Makefile文件
KDIR = /home/python/Hard_disk_21G/04-Linux_Source/Kernel/linux-xlnx
PWD := $(shell pwd)
CC = $(CROSS_COMPILE)gcc
ARCH =arm
MAKE =make
obj-m:=button_interrupt.o
modules:
$(MAKE) -C $(KDIR) ARCH=$(ARCH) CROSS_COMPLE=$(CROSS_COMPLE) M=$(PWD) modules
clean:
make -C $(KDIR) ARCH=$(ARCH) CROSS_COMPLE=$(CROSS_COMPLE) M=$(PWD) clean