应用代码(3)——modbus模板(RTU消息帧)
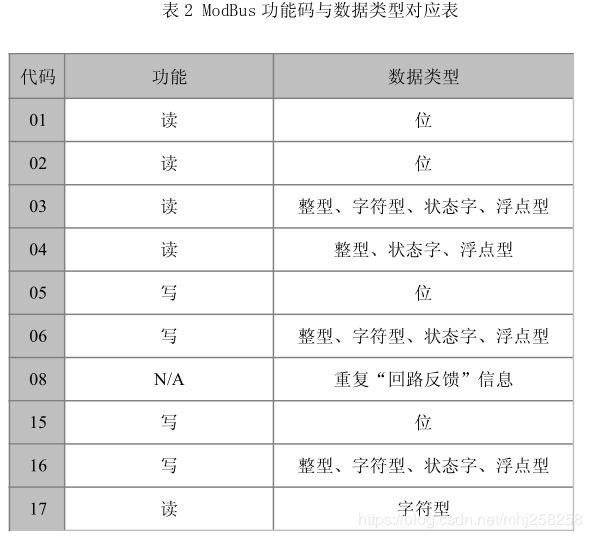
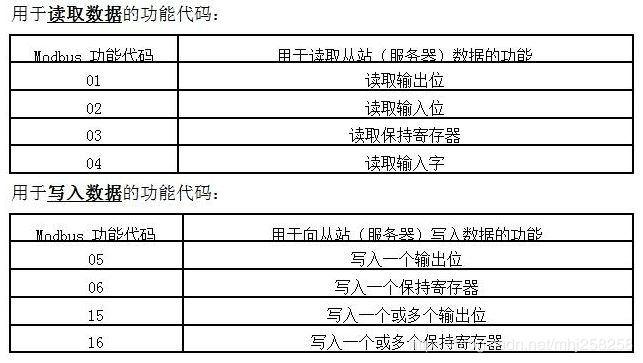
[1]Modbus简介
首先要知道传输的流程:
一般情景是:主机(可以是pc)接底层的主控(以下叫从机)
主机主动发送命令——>从机接受到命令——>应答给主机
总的方式就是通过一问一答的方式进行通讯
帧的构成:

T1-T2-T3-T4指的是帧结束的时间,是4个字符时间(要求的是3.5个字符)
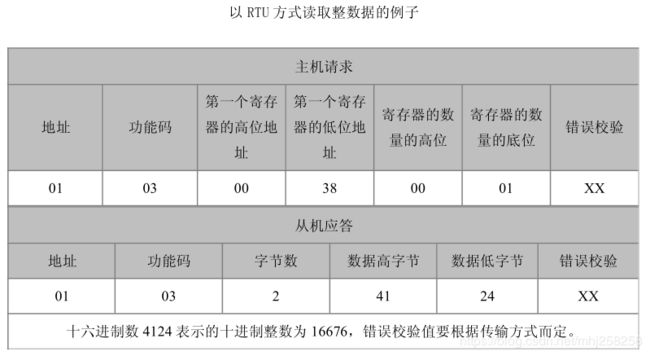
传输示例:
[2]代码分享
例程功能示例:
[2-1]处理一帧数据ReceOneChar函数(可以是串口发来的数据)
定义变量:
//modbus一帧数据错误类型(主要用来检查数据哪里出错)
#define FrameData_OK 0 //数据正常
#define FrameData_LENGTH 1 //数据长度有误
#define FrameData_CRC 2 //数据CRC有误
#define FrameData_STATION 3 //数据站号有误
#define FrameData_ADDR 4 //数据地址超限
#define FrameData_NUM 5 //数据无回应
//-------------------这一段个人猜想是根据主机来配置的大小-----------------
//用户数据区
//M和D共用一个数组,可按位/字访问整个用户数据区,每16个M位组成一个D
//对应MODBUS协议的%M和%MW
#define D_OFFSET 0 //D起始地址
#define D_MAX 1024 //D总数
#define D_BK 768 //D掉电保持
#define M_OFFSET 0 //M起始地址
#define M_MAX D_MAX*16 //M总数
//----------------------------------------------------
uint8_t com0recv_state; //0:接收空闲 1:正在接收 2:接收完成
uint8_t com0recv_index; //接收索引 用于确定接收数据长度
uint8_t com0recv_over;
uint8_t com0recv_tim; //用于确定数据有没有接收成功
uint8_t com0recv[300]; //COM0接收缓冲区
uint8_t com0send_over; //1:发送完成
uint8_t com0send_index; //发送索引 用于确定发送数据长度
uint8_t com0send_len; //
uint8_t com0send[300]; //COM0发送缓冲区
uint16_t modbus_number = 1; //I通道地址(485通信站号) 1~126 默认:1
处理函数:
void ReceOneChar(void)
{
uint8_t temp_cmd;
//1# 接收不足一帧
if(com0recv_index < 3)
{
/*报错变量*/
err_status = FrameData_LENGTH; //NO.1
goto RECV0_END;
}
//2# CRC校验
{
union
{
uint8_t B[2];
uint16_t W;
}tmp_crc;
uint16_t tmp_crc1;
/*CRC校验*/
tmp_crc1 = CRC16(com0recv,com0recv_index-2);
/*把该帧里的最后两个元素赋值给B[0],B[1]*/
tmp_crc.B[0] = com0recv[com0recv_index-2];
tmp_crc.B[1] = com0recv[com0recv_index-1];
if(tmp_crc1!=tmp_crc.W)//校验错误
{
err_status = FrameData_CRC; //NO.2
goto RECV0_END;
}
}
//3# 站号错误(因为可以接多个485,所以我们先确认,是否是我们需要地址线)
if((com0recv[0]!=modbus_number) && (com0recv[0]!=0))
{
err_status = FrameData_STATION; //NO.3
goto RECV0_END;
}
//4# 取命令(回复的时候用)
{
temp_cmd = com0recv[1];
com0send[0] = com0recv[0]; //地址
com0send[1] = temp_cmd; //功能码
}
//5# 命令处理
{
uint16_t temp_addr;
uint16_t temp_num;
//取地址(数据地址)
temp_addr = com0recv[2];
temp_addr<<= 8;
temp_addr = temp_addr + com0recv[3]; //寄存器的地址16位
//取点数(数据大小)
temp_num = com0recv[4];
temp_num<<= 8;
temp_num = temp_num + com0recv[5]; //寄存器的数量16位
//--------------------------判断数据地址超限----------------------------
if((temp_cmd == 0x05) || (temp_cmd == 0x06)) //单点操作
{
if((temp_cmd == 0x05) && (temp_addr >= M_MAX)) //地址上限
{
err_status = FrameData_ADDR; //NO.4
goto RECV0_END;
}
if((temp_cmd == 0x06) && (temp_addr >= D_MAX)) //地址上限
{
err_status = FrameData_ADDR; //NO.4
goto RECV0_END;
}
}
else //多点操作
{
uint16_t max_addr;
if(temp_num == 0) //点数为0,无回应
{
err_status = FrameData_NUM; //NO.5
goto RECV0_END;
}
max_addr = temp_addr + temp_num;//最大数据地址
if((temp_cmd == 0x01) || (temp_cmd == 0x02) || (temp_cmd == 0x0F)) //读/写N位
{
if((max_addr>M_MAX) || (temp_num>(100*16))) //地址上限
{
err_status = FrameData_ADDR; //NO.4
goto RECV0_END;
}
}
else if((temp_cmd == 0x03) || (temp_cmd == 0x04) || (temp_cmd == 0x10)) //读/写N字
{
if((max_addr>D_MAX) || (temp_num>100)) //地址上限
{
err_status = FrameData_ADDR; //NO.4
goto RECV0_END;
}
}
}
//------------------------------------------------------
err_status = FrameData_OK; //NO.0
//处理程序
switch(temp_cmd) //根据不同的功能码处理不同的事
{
case 0x01: ReadCoil(); break;
case 0x02: Read2Coil(); break;
case 0x03: ReadReg(); break;
case 0x04: ReadInputReg(); break;
case 0x05: SetCoil(); break;
case 0x06: SetReg(); break;
case 0x0f: SetNCoil(); break;
case 0x10: SetNReg(); break;
default: goto RECV0_END; break;
}
//发送回应
{
/*tomi 发送*/
uint16_t tmp_crc;
modbus_dir_tx(); //发送模式
tmp_crc = CRC16(com0send,com0send_len-2);
com0send[com0send_len-1] = tmp_crc>>8;
com0send[com0send_len-2] = tmp_crc;
com0send_index=1;
com0send_over=0;
USART1->DR = com0send[0];
}
}
//接收处理结束
RECV0_END:
com0recv_index = 0; //置0
com0recv_state = 0; //设置接收为空闲
OPEN_COM0RECV(); //使能接收
}
[2-1-2] 接收完成标志位置位
/**
* @brief TIME8定时器中断服务程序
* @brief 1ms时基 专门用来处理modbus485
* @param None
* @return None
*/
void TIM8_UP_IRQHandler(void)
{
if(TIM_GetITStatus(TIM8,TIM_IT_Update)!=RESET)
{
TIM_ClearITPendingBit(TIM8, TIM_IT_Update);
//COM0接收空闲处理
{
if(com0recv_state == 1) //接收中
{
com0recv_tim++;
if(com0recv_tim>5)
{
com0recv_state =2; //置2:接收完成
com0recv_tim = 0; //清0
CLOSE_COM0RECV(); //停止接收
}
}
}
}
}
[2-1-3] 以04功能码为例的应答
/**
*@brief 读输入寄存器-读N字(功能码:0x04) [3F暂时未用到]
*@param none
*@return none
*/
void ReadInputReg(void)
{
uint16_t i;
uint16_t j;
uint16_t addr;
uint16_t num;
//取地址
addr = com0recv[2];
addr<<= 8;
addr = addr + com0recv[3];
//取点数
num = com0recv[4];
num<<= 8;
num = num + com0recv[5];
//开始读字数据
j=3;
for(i=0; i<num; i++)
{
com0send[j++] = (uint8_t)((DATAW[addr]>>8)&0xff);
com0send[j++] = (uint8_t)(DATAW[addr]&0xff);
addr++;
}
com0send[2] = num*2; //byte个数
com0send_len = com0send[2]+5; //5=1+1+1+2 => 站号+功能码+字节数+CRC长度
}
[2-1-4]CRC校验代码
/**
*@brief CRC效验 查表法
*@param1 帧其起始指针
*@param2 长度
*@return none
*/
unsigned short CRC16(uint8_t *buff_addr, unsigned short len) //产生CRC值
{
const uint8_t CRC_HIGH[]= //高字节CRC值表
{
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40
};
const uint8_t CRC_LOW[] = //低字节CRC值
{
0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06,
0x07, 0xC7, 0x05, 0xC5, 0xC4, 0x04, 0xCC, 0x0C, 0x0D, 0xCD,
0x0F, 0xCF, 0xCE, 0x0E, 0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09,
0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9, 0x1B, 0xDB, 0xDA, 0x1A,
0x1E, 0xDE, 0xDF, 0x1F, 0xDD, 0x1D, 0x1C, 0xDC, 0x14, 0xD4,
0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3,
0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3,
0xF2, 0x32, 0x36, 0xF6, 0xF7, 0x37, 0xF5, 0x35, 0x34, 0xF4,
0x3C, 0xFC, 0xFD, 0x3D, 0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A,
0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38, 0x28, 0xE8, 0xE9, 0x29,
0xEB, 0x2B, 0x2A, 0xEA, 0xEE, 0x2E, 0x2F, 0xEF, 0x2D, 0xED,
0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26,
0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60,
0x61, 0xA1, 0x63, 0xA3, 0xA2, 0x62, 0x66, 0xA6, 0xA7, 0x67,
0xA5, 0x65, 0x64, 0xA4, 0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F,
0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB, 0x69, 0xA9, 0xA8, 0x68,
0x78, 0xB8, 0xB9, 0x79, 0xBB, 0x7B, 0x7A, 0xBA, 0xBE, 0x7E,
0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x75, 0xB5,
0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71,
0x70, 0xB0, 0x50, 0x90, 0x91, 0x51, 0x93, 0x53, 0x52, 0x92,
0x96, 0x56, 0x57, 0x97, 0x55, 0x95, 0x94, 0x54, 0x9C, 0x5C,
0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E, 0x5A, 0x9A, 0x9B, 0x5B,
0x99, 0x59, 0x58, 0x98, 0x88, 0x48, 0x49, 0x89, 0x4B, 0x8B,
0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C,
0x44, 0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42,
0x43, 0x83, 0x41, 0x81, 0x80, 0x40
};
uint8_t tmp_HIGH = 0xff; //CRC高字节初始化
uint8_t tmp_LOW = 0xff; //CRC低字节初始化
unsigned short uIndex; //CRC查表指针
//计算CRC值
while(len--)
{
uIndex = tmp_HIGH^(*buff_addr++);
tmp_HIGH = tmp_LOW^CRC_HIGH[uIndex];
tmp_LOW = CRC_LOW[uIndex];
}
//return(tmp_HIGH<<8|tmp_LOW);//大端模式(51)
return(tmp_LOW<<8|tmp_HIGH);//小端模式
}