树莓派3 ubuntu Mate 16.04 安装ROS环境
以下仅为回忆使用
设备: 树莓派3
系统: Ubuntu mate 16.04
日期:2018/7/20
目前支持树莓派3b+官方的Ubuntu mate系统还没出,強行使用會出現彩虹屏,網上查過一些方法沒成功,如果有人有可以分享给我,萬分感謝!
1)使用SD Card Formatter 格式化SD卡,没什么悬念下一步,下一步。
2)下载Ubuntu MATE 16.04系统备用
在Windows上烧录系统需要下载Win32 Disk Imager
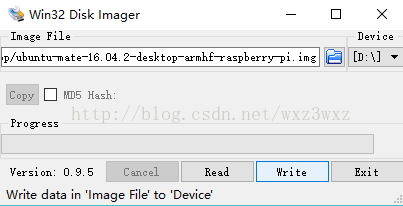
点击‘Write’进行烧录并不难。
烧录完成就可以把SD卡插到树莓派上了。(在此之前有个小知识就是Ubuntu16.04 系统SSH是默认关闭的,可以在安装好的系统盘中创建一个没有扩展名的ssh文件,相关资料查看这里)
3)进入系统也是下一步下一步安装完系统后自动重启,在此开机后若要使用WiFi更新系统输入命令
$ sudo raspi-config
(rasbian 系统和ubuntu mate 的raspi-config 界面不太一样)
设置参考这里
将ssh功能打开,然后重启
4)重启后可以连接wifi,进行ROS安装
官方参考说明
- 设置你的来源列表:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'同时官方提供了其他的源:中国的源可能会快一些
sudo sh -c '. /etc/lsb-release && echo "deb http://ros.exbot.net/rospackage/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'- 设置你的密钥
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116如果您遇到与keyserver连接的问题,可以尝试在前面的命令中替换hkp://pgp.mit.edu:80或hkp:/ keyserver.ubuntu.com:80
- 安装
sudo apt-get update此时会有个问题update是出现lock的异常,
E: Could not get lock /var/lib/apt/lists/lock - open (11: Resource temporarily unavailable)
E: Unable to lock the list directory
解决方法一:输入以下命令,再运行 “sudo apt-get update”。
sudo rm /var/cache/apt/archives/lock
sudo rm /var/lib/dpkg/lock还有一种情况是之前占用了进程导致的lock被占用
解决方法二:输入
ps aux查看进程如下图 -------查找“apt-get update”任务的线程号即PID号 我这个是“2097”然后输入"sudo kill (PID)"杀死线程。
sudo kill 2097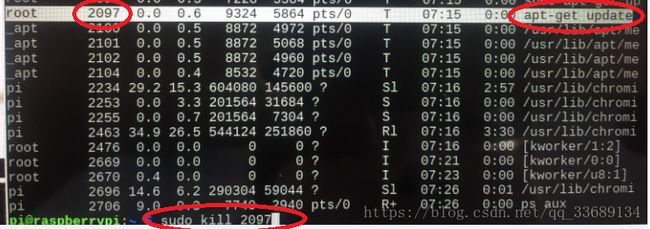
- 安装ROS工具
官方提供了四种工具包:
桌面完整版:ROS, rqt, rviz, robot-generic libraries, 2D/3D simulators, navigation and 2D/3D perception
sudo apt-get install ros-kinetic-desktop-full桌面版:ROS, rqt, rviz, and robot-generic libraries
sudo apt-get install ros-kinetic-desktopROS基础包:ROS package, 编译库,通讯库.
sudo apt-get install ros-kinetic-ros-base个人包:安装特定的ROS包(用破折号(-)代替下划线(_)我在写的时候还去百度以下什么是破折号!这个脑子呀)
例如:
sudo apt-get install ros-kinetic-ros-base可以通过以下,寻找你想要的包
apt-cache search ros-kinetic- 初始化rosdep
帮助你处理一些ROS运行时的系统依赖项
sudo rosdep init
rosdep update- 环境设置
"~/.bashrc"用于添加源代码
官方wiki上写的是按bash装的,ubuntu默认shell是bash shell,如果你的是zsh,要注意
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc之后建立工作空间之后,还可以把工作空间里面devel/setup.bash加进.bashrc里面,方便使用
- 安装依赖关系构建包
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential完成安装!