Palabos 源码学习 | 浸入边界法Immersed Boundary Method
源码中单独的浸入边界法类
首先我们需要了解ib-lbm计算中,先(首次需initial)计算Lagrangian点的力g,再将g spreading on Eulerian格点,接下来执行碰撞和流动,然后通过interpolation得到Lagrangian的速度,最后更新Lagrangian格点位置。
中英穿插的描述是因为方便读者理解论文中用到的英语。
迭代过程中边界力的计算
> template<typename T> void
> ComputeImmersedBoundaryForce3D<T>::processGenericBlocks (
> Box3D domain, std::vector<AtomicBlock3D*> blocks ) {
> PLB_PRECONDITION( blocks.size()==2 );
> TensorField3D<T,3>* force = dynamic_cast<TensorField3D<T,3>*>(blocks[0]);
> AtomicContainerBlock3D* container = dynamic_cast<AtomicContainerBlock3D*>(blocks[1]);
> PLB_ASSERT(force);
> PLB_ASSERT(container);
> Dot3D location = force->getLocation();
> ImmersedWallData3D<T>* wallData =
> dynamic_cast<ImmersedWallData3D<T>*>( container->getData() );
> PLB_ASSERT(wallData);
> std::vector< Array<T,3> > const& vertices = wallData->vertices;
> std::vector<Array<T,3> >& g = wallData->g;
> PLB_ASSERT( vertices.size()==g.size() );
>
> for (plint iX = 0; iX < force->getNx(); iX++) {
> for (plint iY = 0; iY < force->getNy(); iY++) {
> for (plint iZ = 0; iZ < force->getNz(); iZ++) {
> force->get(iX, iY, iZ).resetToZero();
> }
> }
> }
>
> for (pluint i=0; i<vertices.size(); ++i) {
> Array<T,3> const& vertex = vertices[i];
> Array<plint,3> intPos((plint) vertex[0] - location.x, (plint) vertex[1] - location.y, (plint) vertex[2] - location.z);
> const Array<plint,2> xLim((vertex[0] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<plint,2> yLim((vertex[1] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<plint,2> zLim((vertex[2] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<T,3> fracPos(util::frac(vertex[0]), util::frac(vertex[1]), util::frac(vertex[2]));
> for (plint dx = xLim[0]; dx <= xLim[1]; dx++) {
> for (plint dy = yLim[0]; dy <= yLim[1]; dy++) {
> for (plint dz = zLim[0]; dz <= zLim[1]; dz++) {
> Array<plint,3> pos(intPos+Array<plint,3>(dx,dy,dz));
> Array<T,3> r((T)dx-fracPos[0],(T)dy-fracPos[1],(T)dz-fracPos[2]);
> T W = inamuroDeltaFunction<T>().W(r);
> force->get(pos[0], pos[1], pos[2]) += W*g[i];
> }
> }
> }
> } }
主要思路是以张量场的方式收集和计算区块的力。在IBM实现中,已定义rhobar,j,和container,定义的g即为力。
定义force为3D的张量场,定义location为force的位置,定义wallData为container里数据,定义vertices为wallData里的顶点数据(即流域内固体顶点位置),定义g为wallData里的力。
force是基于Eulerian mesh,而g基于Lagrangian mesh。
目测这个force就是作用在eulerian网格上的力,location也是eulerian网格坐标,vertices的顶点坐标vertex和力g都是lagragian网格上的参数。
> template<typename T> struct ImmersedWallData3D : public
> ContainerBlockData {
> std::vector< Array<T,3> > vertices;
> std::vector<T> areas;
> std::vector< Array<T,3> > normals;
> std::vector< Array<T,3> > g;
> std::vector<int> flags; // Flag for each vertex used to distinguish between vertices for conditional reduction operations.
> std::vector<pluint> globalVertexIds;
> virtual ImmersedWallData3D<T>* clone() const {
> return new ImmersedWallData3D<T>(*this);
> } };
循环的第一步将force重置为0,此处我猜测是否了避免整个计算过程中力的累加。
第二个循环则依次在每个顶点上计算。并定义vertex为单个顶点,该顶点由0,1,2表示三个轴坐标。
<表达式1>?<表达式2>:<表达式3> ;
若表达式1为真,则执行表达式2;若表达式1的值为假,则执行表达式3。所以xLim,yLim,zLim的结果只有两种:
- xLim[0]为-2,xLim[1]为1。
- xLim[0]为-1,xLim[1]为2。
循环中的dx也是从-2,-1,0,1,2或者-1,0,1,2,3循环。
Array这段代码的作用是得到vertex的Lagrangian坐标,再四舍五入,减去location坐标,intPos得到值是Eulerian坐标,根据IBM作用邻域的概念判断,后续是为了确定计算邻域。
像dx-fracPos[0]即计算Dirac函数中的x方向距离。
Arraydx,dy,dz用于得到周围邻域被施加力的格点Eulerian坐标,由负到正,实际效果则是在这些Eulerian格点pos上作用。
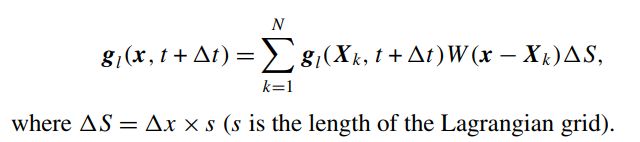
force->get(pos[0], pos[1], pos[2]) += W*g[i];主要是实现下图的g的迭代累加(这里的g是Eulerian点的力)。
梳理一遍
1)得到Eulerian的force,得到边界Lagrangian坐标
2)利用整型四舍五入拉格朗日坐标来获得欧拉坐标,intPos=(plint) vertex[0] - location.x
3)确定邻域范围,利用pos(intPos+Array
4)util::frac(vertex[0]得到小数值,(T)dx-fracPos[0]即计算距离r
5)计算得到体积力force->get(pos[0], pos[1], pos[2]) += W*g[i]
补档
文上几处我猜测的地方还未确定,等确定后会回来修改。
浸入边界的生成
> template<typename T>
> InstantiateImmersedWallData3D<T>::InstantiateImmersedWallData3D (//可见这里需要三个输入参数,其中最后一个是normals
> std::vector< Array<T,3> > const& vertices_,
> std::vector<T> const& areas_,
> std::vector< Array<T,3> > const& normals_)//这个是算例中出现的container
> : vertices(vertices_),
> areas(areas_),
> normals(normals_) {
> PLB_ASSERT(vertices.size() == areas.size());
> PLB_ASSERT(normals.size()==0 || normals.size() == areas.size()); }
// 这个rhobar来源于生成标量场
// MultiScalarField3D *rhoBar = generateMultiScalarField((MultiBlock3D&) *lattice,
// largeEnvelopeWidth).release();
// rhoBar->toggleInternalStatistics(false);
//container以rhoBar生成
// MultiContainerBlock3D container(*rhoBar);
> template<typename T> void
> InstantiateImmersedWallData3D<T>::processGenericBlocks (
> Box3D domain, std::vector<AtomicBlock3D*> blocks ) {
> PLB_PRECONDITION( blocks.size()==1 );
> AtomicContainerBlock3D* container = dynamic_cast<AtomicContainerBlock3D*>(blocks[0]);
> PLB_ASSERT( container );
> bool useNormals = normals.size()>0;//normals中大于0处定义为1
> Dot3D location = container->getLocation();
> ImmersedWallData3D<T>* wallData = new ImmersedWallData3D<T>;//此处定义了wallData
> Box3D extendedEnvelope(domain.enlarge(2).shift(location.x, location.y, location.z));
>
> for (pluint i=0; i<vertices.size(); ++i) {
> // Vertices which are close to the boundaries of the extendedEnvelope
> // are irrelevant, because they will act upon the bulk of the computational
> // domain through an Inamuro kernel, which at this distance is close to zero.
> // It is therefore OK, numerically speaking to exclude an epsilon-margin close
> // to these boundaries. Plus, it is required for technical reasons, because if
> // later on we pass across the boundaries of the extendedEnvelope because
> // of roundoff errors, the code will crash.
> static const T epsilon = 1.e-4;
> if (contained(vertices[i], extendedEnvelope, epsilon)) {
> wallData->vertices.push_back(vertices[i]);//将顶点数据读入wallData
> wallData->areas.push_back(areas[i]);//将面积数据读入wallData
> if (useNormals) {//这样的判断将wallData中的normals里大于0的部分读入wallData
> wallData->normals.push_back(normals[i]);
> }
> wallData->g.push_back(Array<T,3>((T)0.,(T)0.,(T)0.));//可见初始边界时,其力为0
> wallData->globalVertexIds.push_back(i);
> }
> }
> wallData->flags = std::vector<int>(wallData->vertices.size(), 0);
> container->setData(wallData); }//container得到wallData的数据
>
> template<typename T> InstantiateImmersedWallData3D<T>*
> InstantiateImmersedWallData3D<T>::clone() const {
> return new InstantiateImmersedWallData3D<T>(*this); }
>
> template<typename T> void
> InstantiateImmersedWallData3D<T>::getTypeOfModification(std::vector<modif::ModifT>&
> modified) const {
> modified[0] = modif::staticVariables; // Container Block with triangle data. }
>
> template<typename T> BlockDomain::DomainT
> InstantiateImmersedWallData3D<T>::appliesTo() const {
> return BlockDomain::bulk; }
ImmersedWallData3D
在初始化浸入的边界时,用到了ImmersedWallData3D,大体作用是定义了vertices,areas,normals,g,id和flag。
> template<typename T> struct ImmersedWallData3D : public
> ContainerBlockData {
> std::vector< Array<T,3> > vertices;
> std::vector<T> areas;
> std::vector< Array<T,3> > normals;
> std::vector< Array<T,3> > g;
> std::vector<int> flags; // Flag for each vertex used to distinguish between vertices for conditional reduction operations.
> std::vector<pluint> globalVertexIds;
> virtual ImmersedWallData3D<T>* clone() const {
> return new ImmersedWallData3D<T>(*this);
> } };
Inamuro IBM
在palabos中,Inamuro的算法也包含了全套g和j计算。
Inamuro IBM的调用
调用算例取材于MovingWall。
> int ibIter; param.ibIter = 4;
> instantiateImmersedWallData(vertices, areas, container);
> for (int i = 0; i < param.ibIter; i++) {
> inamuroIteration(SurfaceVelocity(timeLB),
> *rhoBar, *j, container, (T) 1.0 / param.omega, incompressibleModel);
> }
> }
Inamuro迭代
> template<typename T, class VelFunction> class InamuroIteration3D :
> public BoxProcessingFunctional3D { public:
> InamuroIteration3D(VelFunction velFunction_, T tau_, bool incompressibleModel_);
> virtual void processGenericBlocks(Box3D domain, std::vector<AtomicBlock3D*> fields);
> virtual InamuroIteration3D<T,VelFunction>* clone() const;
> virtual void getTypeOfModification(std::vector<modif::ModifT>& modified) const;
> virtual BlockDomain::DomainT appliesTo() const; private:
> VelFunction velFunction;
> T tau;
> bool incompressibleModel; };
>
> template<typename T, class VelFunction> void inamuroIteration (
> VelFunction velFunction,
> MultiScalarField3D<T>& rhoBar,
> MultiTensorField3D<T,3>& j,
> MultiContainerBlock3D& container, T tau,
> bool incompressibleModel ) {
> std::vector<MultiBlock3D*> args;
> args.push_back(&rhoBar);
> args.push_back(&j);
> args.push_back(&container);
> applyProcessingFunctional (//利用args引用存储一下数据
> new InamuroIteration3D<T,VelFunction>(velFunction, tau, incompressibleModel), rhoBar.getBoundingBox(), args ); }
> template<typename T, class VelFunction>
> InamuroIteration3D<T,VelFunction>::InamuroIteration3D(VelFunction
> velFunction_, T tau_, bool incompressibleModel_)
> : velFunction(velFunction_),//velFunction在movingwall算例里有算例体现
> tau(tau_),
> incompressibleModel(incompressibleModel_) { }
>
> template<typename T, class VelFunction> void
> InamuroIteration3D<T,VelFunction>::processGenericBlocks (
> Box3D domain, std::vector<AtomicBlock3D*> blocks ) {
> PLB_PRECONDITION( blocks.size()==3 );
> ScalarField3D<T>* rhoBar = dynamic_cast<ScalarField3D<T>*>(blocks[0]);
> TensorField3D<T,3>* j = dynamic_cast<TensorField3D<T,3>*>(blocks[1]);
> AtomicContainerBlock3D* container = dynamic_cast<AtomicContainerBlock3D*>(blocks[2]);
> PLB_ASSERT( rhoBar );
> PLB_ASSERT( j );
> PLB_ASSERT( container );
> Dot3D location = rhoBar->getLocation();
> Dot3D ofsJ = computeRelativeDisplacement(*rhoBar, *j);//这里的ofsJ顾名思义,计算了相对变化量,用于后续动量计算
> ImmersedWallData3D<T>* wallData =
> dynamic_cast<ImmersedWallData3D<T>*>( container->getData() );
> PLB_ASSERT(wallData);//这部分与上文提到的wallData作用相同
>
> std::vector< Array<T,3> > const& vertices = wallData->vertices;
> std::vector<T> const& areas = wallData->areas;
> PLB_ASSERT( vertices.size()==areas.size() );
> std::vector<Array<T,3> > deltaG(vertices.size());
> std::vector<Array<T,3> >& g = wallData->g;
> PLB_ASSERT( vertices.size()==g.size() );
>
> // In this iteration, the force is computed for every vertex.
> if (incompressibleModel) {
> for (pluint i=0; i<vertices.size(); ++i) {
> Array<T,3> const& vertex = vertices[i];
> Array<plint,3> intPos((plint) vertex[0] - location.x, (plint) vertex[1] - location.y, (plint) vertex[2] - location.z);//int来整型四舍五入取得整数位置,从而以Lagrangian点坐标得到Eulerian点坐标
> const Array<plint,2> xLim((vertex[0] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<plint,2> yLim((vertex[1] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<plint,2> zLim((vertex[2] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<T,3> fracPos(util::frac(vertex[0]), util::frac(vertex[1]), util::frac(vertex[2]));//得到小数部分
> Array<T,3> averageJ; averageJ.resetToZero();
> // Use the weighting function to compute the average momentum
> // and the average density on the surface vertex.
> // x x . x x
> for (plint dx = xLim[0]; dx <= xLim[1]; dx++) {
> for (plint dy = yLim[0]; dy <= yLim[1]; dy++) {
> for (plint dz = zLim[0]; dz <= zLim[1]; dz++) {
> Array<plint,3> pos(intPos+Array<plint,3>(dx,dy,dz));//得到周围点坐标
> Array<T,3> nextJ = j->get(pos[0]+ofsJ.x, pos[1]+ofsJ.y, pos[2]+ofsJ.z);//nextJ即下一个j的位置
> Array<T,3> r((T)dx-fracPos[0],(T)dy-fracPos[1],(T)dz-fracPos[2]);//得出距离r
> T W = inamuroDeltaFunction<T>().W(r);// Dirac function,在immersedwall.h最上面就能看到
> averageJ += W*nextJ;
> }
> }
> }
> //averageJ += (T)0.5*g[i];
> Array<T,3> wallVelocity = velFunction(vertex);
> deltaG[i] = areas[i]*(wallVelocity-averageJ);
> g[i] += deltaG[i];//得到lagrangian点的力
> }
> } else { // Compressible model.
> for (pluint i=0; i<vertices.size(); ++i) {
> Array<T,3> const& vertex = vertices[i];
> Array<plint,3> intPos((plint) vertex[0] - location.x, (plint) vertex[1] - location.y, (plint) vertex[2] - location.z);
> const Array<plint,2> xLim((vertex[0] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<plint,2> yLim((vertex[1] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<plint,2> zLim((vertex[2] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<T,3> fracPos(util::frac(vertex[0]), util::frac(vertex[1]), util::frac(vertex[2]));
> Array<T,3> averageJ; averageJ.resetToZero();
> T averageRhoBar = T();
> // Use the weighting function to compute the average momentum
> // and the average density on the surface vertex.
> // x x . x x
> for (plint dx = xLim[0]; dx <= xLim[1]; dx++) {
> for (plint dy = yLim[0]; dy <= yLim[1]; dy++) {
> for (plint dz = zLim[0]; dz <= zLim[1]; dz++) {
> Array<plint,3> pos(intPos+Array<plint,3>(dx,dy,dz));
> T nextRhoBar = rhoBar->get(pos[0], pos[1], pos[2]);
> Array<T,3> nextJ = j->get(pos[0]+ofsJ.x, pos[1]+ofsJ.y, pos[2]+ofsJ.z);
> Array<T,3> r((T)dx-fracPos[0],(T)dy-fracPos[1],(T)dz-fracPos[2]);
> T W = inamuroDeltaFunction<T>().W(r);
> averageJ += W*nextJ;
> averageRhoBar += W*nextRhoBar;
> }
> }
> }
> //averageJ += (T)0.5*g[i];
> Array<T,3> wallVelocity = velFunction(vertex);
> deltaG[i] = areas[i]*((averageRhoBar+(T)1.)*wallVelocity-averageJ);
> //g[i] += deltaG[i];
> g[i] += deltaG[i]/((T)1.0+averageRhoBar);
> }
> }
>
> // In this iteration, the force is applied from every vertex to the grid nodes.
> for (pluint i=0; i<vertices.size(); ++i) {
> Array<T,3> const& vertex = vertices[i];
> Array<plint,3> intPos((plint) vertex[0] - location.x, (plint) vertex[1] - location.y, (plint) vertex[2] - location.z);
> const Array<plint,2> xLim((vertex[0] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<plint,2> yLim((vertex[1] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<plint,2> zLim((vertex[2] < (T) 0 ? Array<plint,2>(-2, 1) : Array<plint,2>(-1, 2)));
> const Array<T,3> fracPos(util::frac(vertex[0]), util::frac(vertex[1]), util::frac(vertex[2]));
> for (plint dx = xLim[0]; dx <= xLim[1]; dx++) {
> for (plint dy = yLim[0]; dy <= yLim[1]; dy++) {
> for (plint dz = zLim[0]; dz <= zLim[1]; dz++) {
> Array<plint,3> pos(intPos+Array<plint,3>(dx,dy,dz));
> Array<T,3> nextJ = j->get(pos[0]+ofsJ.x, pos[1]+ofsJ.y, pos[2]+ofsJ.z);
> Array<T,3> r((T)dx-fracPos[0],(T)dy-fracPos[1],(T)dz-fracPos[2]);
> T W = inamuroDeltaFunction<T>().W(r);
> nextJ += tau*W*deltaG[i];
> j->get(pos[0]+ofsJ.x, pos[1]+ofsJ.y, pos[2]+ofsJ.z) = nextJ;//同样是得到r,这次是计算g的spreading on Eulerian格点
> }
> }
> }
> } }
>
> template<typename T, class VelFunction>
> InamuroIteration3D<T,VelFunction>*
> InamuroIteration3D<T,VelFunction>::clone() const {
> return new InamuroIteration3D<T,VelFunction>(*this); }
>
> template<typename T, class VelFunction> void
> InamuroIteration3D<T,VelFunction>::getTypeOfModification(std::vector<modif::ModifT>&
> modified) const {
> modified[0] = modif::nothing; // RhoBar
> modified[1] = modif::staticVariables; // J
> modified[2] = modif::nothing; // Container Block with triangle data. }
>
> template<typename T, class VelFunction> BlockDomain::DomainT
> InamuroIteration3D<T,VelFunction>::appliesTo() const {
> return BlockDomain::bulk; }