人工智能-树莓派小车(3)——GPIO控制小车
上一个教程介绍了树莓派的GPIO接口,并且简单的利用这个接口控制了小灯的亮灭,详细见人工智能之我与树莓派(2),本次教程将更进一步,利用GPIO口实现控制智能小车的前进后退以及超声波避障、红外线探测等功能。
- 智能小车硬件
- GPIO接口设置
-
- 引脚定义
- 通道配置
- 管脚类型设置及初始化
-
- 接口连线
- 控制代码
-
- 开关前大灯
- 机器人方向控制
- 超声波避障
- 红外线避障
-
- 效果演示
- 系列教程
智能小车硬件
硬件包括小车底盘套装(底盘、车轮、电机)、超声波探测模块、红外线感应模块、树莓派、开发板(提供电机外部供电线路、扩展GPIO口等)、电池。
GPIO接口设置
引脚定义
GPIO.setmode(GPIO.BCM)
使用BCM编号
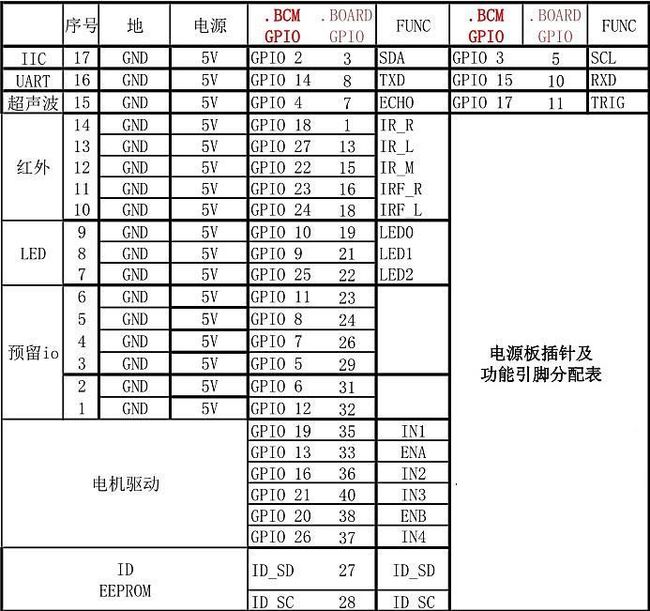
通道配置
########LED口定义#################
LED0 = 10
LED1 = 9
LED2 = 25
LED_L = 11
LED_R = 8
LED_F = 7
LED_CTR = 5
########电机驱动接口定义#################
ENA = 13 #//L298使能A
ENB = 20 #//L298使能B
IN1 = 19 #//电机接口1
IN2 = 16 #//电机接口2
IN3 = 21 #//电机接口3
IN4 = 26 #//电机接口4
########舵机接口定义#################
########超声波接口定义#################
ECHO = 4 #超声波接收脚位
TRIG = 17 #超声波发射脚位
########红外传感器接口定义#################
IR_R = 18 #小车右侧巡线红外
IR_L = 27 #小车左侧巡线红外
IR_M = 22 #小车中间避障红外
IRF_R = 23 #小车跟随右侧红外
IRF_L = 24 #小车跟随左侧红外管脚类型设置及初始化
##########忽略警告###############
GPIO.setwarnings(False)
#########led初始化为000##########
GPIO.setup(LED0,GPIO.OUT,initial=GPIO.HIGH)
GPIO.setup(LED1,GPIO.OUT,initial=GPIO.HIGH)
GPIO.setup(LED2,GPIO.OUT,initial=GPIO.HIGH)
GPIO.setup(LED_L,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(LED_R,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(LED_F,GPIO.OUT,initial=GPIO.LOW)
#########电机初始化为LOW##########
GPIO.setup(ENA,GPIO.OUT,initial=GPIO.LOW)
ENA_pwm=GPIO.PWM(ENA,1000)
ENA_pwm.start(0)
ENA_pwm.ChangeDutyCycle(50)
GPIO.setup(IN1,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(IN2,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(ENB,GPIO.OUT,initial=GPIO.LOW)
ENB_pwm=GPIO.PWM(ENB,1000)
ENB_pwm.start(0)
ENB_pwm.ChangeDutyCycle(50)
GPIO.setup(IN3,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(IN4,GPIO.OUT,initial=GPIO.LOW)
#########红外初始化为输入,并内部拉高#########
GPIO.setup(IR_R,GPIO.IN,pull_up_down=GPIO.PUD_UP)
GPIO.setup(IR_L,GPIO.IN,pull_up_down=GPIO.PUD_UP)
GPIO.setup(IR_M,GPIO.IN,pull_up_down=GPIO.PUD_UP)
GPIO.setup(IRF_R,GPIO.IN,pull_up_down=GPIO.PUD_UP)
GPIO.setup(IRF_L,GPIO.IN,pull_up_down=GPIO.PUD_UP)
##########超声波模块管脚类型设置#########
GPIO.setup(TRIG,GPIO.OUT,initial=GPIO.LOW)#超声波模块发射端管脚设置trig
GPIO.setup(ECHO,GPIO.IN,pull_up_down=GPIO.PUD_UP)#超声波模块接收端管脚设置echo接口连线
控制代码
开关前大灯
####################################################
##名称 Open_Light()
##功能 开大灯LED_F
##入口参数 :无
##出口参数 :无
####################################################
def Open_Flight():#开大灯LED_F
GPIO.output(LED_F,GPIO.HIGH)#大灯正极接IO 负极接GND
####################################################
##名称 Close_Light()
##功能 关大灯LED_F
##入口参数 :无
##出口参数 :无
####################################################
def Close_Flight():#关大灯
GPIO.output(LED_F,GPIO.LOW)#大灯正极接IO 负极接GND
机器人方向控制
def Motor_Forward():
print ( 'motor forward' )
GPIO.output(ENA,True)
GPIO.output(ENB,True)
GPIO.output(IN1,True)
GPIO.output(IN2,False)
GPIO.output(IN3,True)
GPIO.output(IN4,False)
def Motor_Backward():
print ( 'motor_backward' )
GPIO.output(ENA,True)
GPIO.output(ENB,True)
GPIO.output(IN1,False)
GPIO.output(IN2,True)
GPIO.output(IN3,False)
GPIO.output(IN4,True)
def Motor_TurnLeft():
print ( 'motor_turnleft' )
GPIO.output(ENA,True)
GPIO.output(ENB,True)
GPIO.output(IN1,True)
GPIO.output(IN2,False)
GPIO.output(IN3,False)
GPIO.output(IN4,True)
def Motor_TurnRight():
print ( 'motor_turnright' )
GPIO.output(ENA,True)
GPIO.output(ENB,True)
GPIO.output(IN1,False)
GPIO.output(IN2,True)
GPIO.output(IN3,True)
GPIO.output(IN4,False)
def Motor_Stop():
print ( 'motor_stop' )
GPIO.output(ENA,False)
GPIO.output(ENB,False)
GPIO.output(IN1,False)
GPIO.output(IN2,False)
GPIO.output(IN3,False)
GPIO.output(IN4,False)
超声波避障
def checkdist():
GPIO.output(17,GPIO.HIGH)
time.sleep(0.000015)
GPIO.output(17,GPIO.LOW)
while not GPIO.input(4):
pass
t1 = time.time()
while GPIO.input(4):
pass
t2 = time.time()
return (t2-t1)*340/2
try:
while True:
ds = checkdist()
if ds > 0.15:
print 'Distance: %0.3f m' %ds
Motor_Forward()
else:
Motor_Stop()
time.sleep(0.1)
except KeyboardInterrupt:
GPIO.cleanup()红外线避障
def Avoiding():#红外避障函数
if GPIO.input(IR_M) == False:
Motor_Stop()
else:
Motor_Forward()
try:
while True:
Avoiding()
time.sleep(0.1)
except KeyboardInterrupt:
GPIO.cleanup()
效果演示
GPIO控制小车