2017中兴算法挑战赛(迪杰斯特拉)
和刚刚结束的2017华为软件精英挑战赛相比,中兴的题目不难,花了两天时间随便搞了一下(其实也没多长时间,因为是周末,还打了农药),没什么意思,结果刚刚揭晓,58分,评价是“算法尚可,代码一般”,GG,写的太水,大佬莫笑~
赛题:
最强大脑中的收官蜂巢迷宫变态级挑战,相信大家都叹为观止!最强大脑收官战打响后,收视率节节攀升,就连蚁后也不时出题难为一下她的子民们。在动物世界中,称得上活地图的,除了蜜蜂,蚂蚁当仁不让。在复杂多变的蚁巢中, 蚂蚁总是能以最快、最高效的方式游历在各个储藏间(存储食物)。今天,她看完最新一期节目,又发布了一项新任务:小蚁同学,我需要玉米库的玉米,再要配点水果,去帮我找来吧。小蚁正准备出发,蚁后又说:哎呀,回来,我还没说完呢,还有若干要求如下:
1.小蚁同学,你需要尽可能以最少的花费拿到食物(附件图中路线上的数值表示每两个储物间的花费);
2.小蚁同学,你最多只能经过9个储藏间拿到食物(包含起止两个节点,多次通过同一节点按重复次数计算);
3.小蚁同学,你必须经过玉米间,水果间(附件图中标绿色节点);
4.别忘了,食蚁兽也在路上活动呢,一旦与食蚁兽相遇,性命危矣!不过小蚁微信群公告已经公布了敌人信息(附件图中标红色路段);
5.最后,千万别忘了,还有两段路是必须经过的,那里有我准备的神秘礼物等着你呢(附件图中标绿色路段)。
这下小蚁犯难了,这和它们平时找食物的集体活动规则不一样嘛,看来这次需要单独行动了。要怎么选路呢?小蚁经过一番苦思冥想,稿纸堆了一摞,啊,终于找到了!亲爱的同学们,你们能否也设计一种通用的路径搜索算法,来应对各种搜索限制条件,找到一条最优路径,顺利完成蚁后布置的任务呢?

注:
1、蚁巢,有若干个储藏间(附件图中圆圈表示),储藏间之间有诸多路可以到达(各储藏间拓扑图见附件);
2、节点本身通行无花费;
3、该图为无向图,可以正反两方向通行,两方向都会计费,并且花费相同;
4、起止节点分别为附件图中S点和E点。
5、最优路径:即满足限制条件的路径。
算法思路:
贪心算法求解初始解+分段求解最短路+模拟退火算法逐步寻优(实践证明,对于这个对这个问题,贪心算法求出的初始解基本接近最优解,所以说这个比赛很水啦。。。。)
源代码:
/************************************************************
*
* Shortest Path Search for ZTE Fantastic Algorithm
* Author: chyeer
* Datetime: 2017-05-02
* Description: multiple constrainted shortest path search
* based on Shortested Path Faster Algorithm and
* Simulated Anneling Algorithm
*
************************************************************/
#ifndef ZTE_H
#define ZTE_H
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
using namespace std;
namespace pan{
const int maxn = 1001;
const int INF = 1<<10;
const int MAX_LINE_LEN = 50000;
struct edge //edge
{
int to;
int cost;
};
struct node
{
int from;
int to;
};
extern vector myV[maxn]; // adjacecy list used for topo structure of graph
extern vector constraints; // storage for multiple constraints
extern vector group; // storage for combination of multiple constraints
extern vector path; // storage for shortest path
extern int numNode, numEdge; // vertexes, edges
extern int minPath[maxn]; // shortest path
extern int source[maxn]; // source[a]=b, the node before a is b
extern int start, End; // srouce node, sink node
extern int S, E; // Source Node: S, End Node: E
extern bool inQ[maxn]; // in queue or not
extern int wholeDis; // storage of the miniCost for the shortest path
extern int distance; // distance between two nodes
extern vector mustPassedNode; // Node set that must be passed
extern vector> forbidPassedEdge; // Edge set that can not be passed
extern vector> mustPassedEdge; // Edge set that must be passed
void LoadDataFromFile(const char* filename); // load basic graph data
void loadConstraints(); // used for adding constraints
void inputItial(); // input data from screen
void output(int start, int end); // compute shortest path
void SPFA(int start, int end); // shortest path faster algorithm
void greedyAlgorithmForFindingInitialSolution(vector& constraints,
vector& group); // greedy algorithm for finding initial solution
void findInitialSolutionForSimulatedAnnealing(vector& constraints,
vector& group); // get initial solution for simulated anneling
void simulatedAnnealingForGetNewSolution(vector& constraints,
vector& group); // get a new solution for simulated anneling
void simulatedAnnealingForFindShortestPath(vector& constraints,
vector& group); // simulated anneling algorithm
void findShortestPath(vector& group); // find shortest path
void SaveDataToFile(const char* filename, const vector& path);
}
#endif // ZTE_H
/************************************************************
*
* Shortest Path Search for ZTE Fantastic Algorithm
* Author: chyeer
* Datetime: 2017-05-02
* Description: multiple constrainted shortest path search
* based on Shortested Path Faster Algorithm and
* Simulated Anneling Algorithm
*
************************************************************/
#include "zte.h"
using namespace pan;
vector pan::myV[maxn]; //adjacecy list used for topo structure of graph
vector pan::constraints; // storage for multiple constraints
vector pan::group; // storage for combination of multiple constraints
vector pan::path; // storage for shortest path
int pan::numNode, pan::numEdge; //vertexes, edges
int pan::minPath[maxn]; // shortest path
int pan::source[maxn]; // source[a]=b, the node before a is b
int pan::start, pan::End; //srouce node, sink node
int pan::S, pan::E; // Source Node: S, End Node: E
bool pan::inQ[maxn]; // in queue or not
int pan::wholeDis; // storage of the miniCost for the shortest path
int pan::distance; // distance between two nodes
vector pan::mustPassedNode; // Node set that must be passed
vector> pan::forbidPassedEdge; // Edge set that can not be passed
vector> pan::mustPassedEdge; // Edge set that must be passed
void pan::LoadDataFromFile(const char *filename)
{
FILE *fp = fopen(filename, "r");
char *topo[MAX_LINE_LEN]; // Storage for all lines in file.
if (fp == NULL)
{
printf("Fail to open file %s, %s.\n", filename, strerror(errno));
}
printf("Open file %s OK.\n", filename);
char line[MAX_LINE_LEN + 2];
unsigned int cnt = 0; // cnt: count line number of file.
while (!feof(fp))
{
line[0] = 0;
if (fgets(line, MAX_LINE_LEN + 2, fp) == NULL) continue;
if (line[0] == 0) continue;
topo[cnt] = (char *)malloc(MAX_LINE_LEN + 2);
strncpy(topo[cnt], line, MAX_LINE_LEN + 2 - 1); // copy file to topo.
topo[cnt][MAX_LINE_LEN + 1] = 0;
cnt++;
}
fclose(fp);
printf("There are %d lines in file %s.\n", cnt, filename);
int mustVertexNum, forbidEdgeNum, mustEdgeNum;
int index = 0;
sscanf(topo[index], "%d%d%d%d%d", &S, &E, &mustVertexNum,
&forbidEdgeNum, &mustEdgeNum);
index += 2;
int vertex;
for(int i=0; i tmp;
for(int i=0; i>::iterator iter;
for(iter=forbidPassedEdge.begin(); iter!=forbidPassedEdge.end(); iter++)
{
vector::iterator it;
for(it=myV[iter->first].begin(); it!=myV[iter->first].end(); it++)
{
if(it->to == iter->second)
{
//it->cost = INF;
//delete forbid edge
myV[iter->first].erase(it);
//cout << it->to << " " << it->cost << endl;
break;
}
}
for(it=myV[iter->second].begin(); it!=myV[iter->second].end(); it++)
{
if(it->to == iter->first)
{
//it->cost = INF;
// delete forbid edge
myV[iter->second].erase(it);
//cout << it->to << " " << it->cost << endl;
break;
}
}
}
wholeDis = 0;
}
void pan::loadConstraints()
{
node tmp;
tmp.from = 14;
tmp.to = 13;
constraints.push_back(tmp);
tmp.from = 12;
tmp.to = -1;
constraints.push_back(tmp);
tmp.from = 7;
tmp.to = -1;
constraints.push_back(tmp);
tmp.from = 4;
tmp.to = 2;
constraints.push_back(tmp);
vector::iterator it;
for(it=constraints.begin(); it!=constraints.end(); it++)
{
group.push_back(it->from);
if(~it->to)
group.push_back(it->to);
}
#if 0
for(size_t i=0; i& constraints,
vector& group)
{
size_t index_out, index_in;
int cost = INF;
size_t location = 0;
for(size_t i=0; i::iterator itera;
for(itera=constraints.begin(); itera!=constraints.end(); itera++)
{
group.push_back(itera->from);
if(~itera->to)
group.push_back(itera->to);
}
#if 0
for(size_t i=0; i& constraints,
vector& group)
{
constraints.clear();
group.clear();
vector::iterator iter;
node tmp;
for(iter=mustPassedNode.begin(); iter!=mustPassedNode.end(); iter++)
{
bool IN = false;
for(size_t i=0; i>::iterator it;
for(it=mustPassedEdge.begin(); it!=mustPassedEdge.end(); it++)
{
tmp.from = it->first;
tmp.to = it->second;
constraints.push_back(tmp);
}
vector::iterator itera;
for(itera=constraints.begin(); itera!=constraints.end(); itera++)
{
group.push_back(itera->from);
if(~itera->to)
group.push_back(itera->to);
}
greedyAlgorithmForFindingInitialSolution(constraints, group);
#if 0
for(size_t i=0; i";
cout << path[path.size()-1] << endl;
#endif
}
void pan::simulatedAnnealingForGetNewSolution(vector& constraints, vector& group)
{
group.clear();
if(rand() % 2)
{
size_t index_x, index_y;
index_x = rand() % constraints.size();
index_y = rand() % constraints.size();
while(index_x == index_y)
{
index_x = rand() % constraints.size();
index_y = rand() % constraints.size();
}
swap(constraints[index_x], constraints[index_y]);
}
else
{
size_t index;
while(1)
{
index = rand() % constraints.size();
if(~constraints[index].from && ~constraints[index].to)
{
swap(constraints[index].from, constraints[index].to);
break;
}
}
}
vector::iterator it;
for(it=constraints.begin(); it!=constraints.end(); it++)
{
//if(rand() % 2)
// swap(it->from, it->to);
if(~it->from)
group.push_back(it->from);
if(~it->to)
group.push_back(it->to);
}
#if 0
while(!tmp.empty())
{
index = rand() % tmp.size();
tmpNode = tmp[index];
if(rand() % 2)
swap(tmpNode.from, tmpNode.to);
if(~tmpNode.from)
group.push_back(tmpNode.from);
if(~tmpNode.to)
group.push_back(tmpNode.to);
tmp.erase(tmp.begin()+index);
}
#endif
#if 0
vector::iterator iter;
for(iter=group.begin(); iter!=group.end()-1; iter++)
{
cout << *iter << " ";
}
cout << *(group.end()-1) << endl;
#endif
}
// kernel algorithm ---- Simulated Anneling Algorithm
void pan::simulatedAnnealingForFindShortestPath(vector& constraints, vector& group)
{
double speed = 0.9999, T = 1000, t_min = 0.001;
struct timeval t0, t1;
gettimeofday(&t0, NULL);
findInitialSolutionForSimulatedAnnealing(constraints, group); // find initial solution
cout << "Initial cost: " << wholeDis << endl;
int minCost = wholeDis; // cost of initial solution
int bestCost = wholeDis;
vector bestPath(path);
vector tmpConstraints(constraints);
vector bestConstraints(constraints);
vector tmpGroup;
vector bestGroup(group);
int delta;
int iteration = 0;
while(T > t_min)
{
simulatedAnnealingForGetNewSolution(tmpConstraints, tmpGroup);
constraints.assign(tmpConstraints.begin(), tmpConstraints.end());
group.assign(tmpGroup.begin(), tmpGroup.end());
findShortestPath(tmpGroup);
delta = wholeDis - minCost;
if(delta < 0)
{
//cout << "better: " << endl;
tmpConstraints.assign(constraints.begin(), constraints.end());
tmpGroup.assign(group.begin(), group.end());
if(wholeDis < bestCost)
{
bestConstraints.assign(constraints.begin(), constraints.end());
bestGroup.assign(group.begin(), group.end());
bestCost = wholeDis;
//cout << "bestCost: " << bestCost << endl;
}
minCost = wholeDis;
//if(minCost == 13)
// break;
}
else
{
if((int)(exp(delta/T)*100) <= (rand() % 101))
{
//cout << "worse: " << endl;
tmpConstraints.assign(constraints.begin(), constraints.end());
tmpGroup.assign(group.begin(), group.end());
}
}
T *= speed;
iteration++;
if(iteration == 10)
break;
}
gettimeofday(&t1, NULL);
double timeUse = t1.tv_sec - t0.tv_sec +
(t1.tv_usec - t0.tv_usec)/1000000.0;
findShortestPath(bestGroup);
minCost = wholeDis;
bestPath.assign(path.begin(), path.end());
#if 0
int iteration = 100;
while(iteration)
{
simulatedAnnealingForGetNewSolution(constraints, group);
findShortestPath(group);
//cout << "wholeDis: " << wholeDis << " " << "minCost: " << minCost << endl;
if(wholeDis < minCost)
{
bestPath.assign(path.begin(), path.end());
minCost = wholeDis;
cout << "Cost: " << minCost << endl;
}
iteration--;
}
#endif
cout << "The minimum cost is: " << minCost << endl;
cout << "Total vertex num: " << bestPath.size() << endl;
cout << "The best path is: ";
vector::iterator it;
for(it=bestPath.begin(); it!=bestPath.end()-1; it++)
{
cout << *it << "-->";
}
cout << *it << endl;
//cout << "Total iteration num: " << iteration << endl;
cout << "Time elapse: " << timeUse << " s" << endl;
}
void pan::findShortestPath(vector& group)
{
wholeDis = 0;
path.clear();
if(!group.empty())
{
SPFA(S, group[0]);
for(size_t i=0; i>::iterator iter;
for(iter=mustPassedEdge.begin(); iter!=mustPassedEdge.end(); iter++)
{
if(group[i] == iter->first && group[i+1] == iter->second)
{
IN = true;
//add path when the edge must be passed
//path.push_back(group[i]);
path.push_back(group[i+1]);
//add cost
vector::iterator it;
for(it=myV[group[i]].begin(); it!=myV[group[i]].end(); it++)
{
if(it->to == group[i+1])
{
wholeDis += it->cost;
break;
}
}
break;
}
if(group[i] == iter->second && group[i+1] == iter->first)
{
IN = true;
//add path when the edge must be passed
path.push_back(group[i+1]);
//path.push_back(group[i]);
//add cost
vector::iterator it;
for(it=myV[group[i+1]].begin(); it!=myV[group[i]].end(); it++)
{
if(it->to == group[i])
{
wholeDis += it->cost;
break;
}
}
break;
}
}
if(!IN)
SPFA(group[i], group[i+1]);
}
SPFA(group[group.size()-1], E);
}
#if 0
cout << "Minimum Cost: " << wholeDis << endl;
cout << "Path: ";
vector::iterator it;
for(it=path.begin(); it!=path.end()-1; it++)
{
cout << *it << "-->";
}
cout << *it << endl;
#endif
}
void pan::inputItial()
{
int i, from, to, cost;
wholeDis = 0;
for(i=0; i s;
s.push(tmp);
while(source[tmp]!=start)
{
tmp=source[tmp];
s.push(tmp);
}
while(!s.empty())
{
//printf("-->%d",s.top());
path.push_back(s.top());
s.pop();
}
//printf("\n");
//printf("Total cost : %d\n\n",minPath[end]);
distance = minPath[end];
wholeDis += minPath[end];
}
}
void pan::SPFA(int start, int end) //Shortest Path Faster Algorithm
{
memset(inQ, false, sizeof(inQ));
inQ[start] = true;
for(int j=0; j myQ;
myQ.push(start);
int now, to, cost;
while(!myQ.empty())
{
now=myQ.front();
myQ.pop();
for(size_t k=0; kcost)
{
source[to] = now; //record the source of to: now
minPath[to] = cost;
if(!inQ[to])
{
inQ[to] = true;
myQ.push(to);
}
}
}
inQ[now] = false;
}
output(start, end);
}
void pan::SaveDataToFile(const char *filename, const vector& path)
{
fstream fs;
fs.open(filename, ios_base::out);
fs << path.size() << endl << endl;
for(size_t i=0; i/************************************************************
*
* Shortest Path Search for ZTE Fantastic Algorithm
* Author: chyeer
* Datetime: 2017-05-02
* Description: multiple constrainted shortest path search
* based on Shortested Path Faster Algorithm and
* Simulated Anneling Algorithm
*
************************************************************/
#include "zte.h"
#include
using namespace pan;
int main(int argc, char *argv[])
{
#if 0
freopen("C:\\Users\\Administrator\\Desktop\\case4.txt", "r+" , stdin);
while(scanf("%d%d",&numNode,&numEdge)==2,numNode || numEdge)
{
inputItial();
while(scanf("%d%d",&start,&End)==2,start!=-1 && End!=-1)
{
SPFA(start, End);
}
}
loadConstraints();
findShortestPath(group);
simulatedAnnealingForFindShortestPath(constraints, group);
#endif
srand(time(NULL));
//if(argc == 1)
// cout << "Not enough argument!" << endl;
LoadDataFromFile("C:\\Users\\Administrator\\Desktop\\case4.txt");
simulatedAnnealingForFindShortestPath(constraints, group);
//findInitialSolutionForSimulatedAnnealing(constraints, group);
//greedyAlgorithmForFindingInitialSolution(constraints, group);
SaveDataToFile("C:\\Users\\Administrator\\Desktop\\result0.txt", path);
system("pause");
return 0;
}
实验:
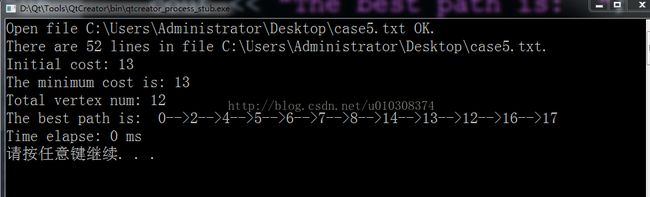
官网样例(18节点):必经点:2 必经边:2
运行结果:
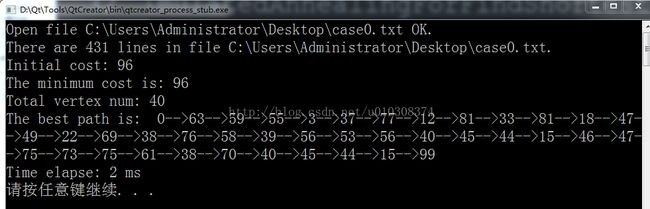
样例1(100节点):必经点:10 必经边:5
运行结果:
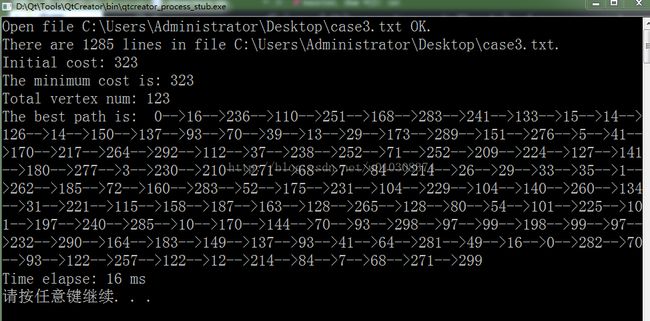
样例2(300节点):必经点:30 必经边:15
运行结果:
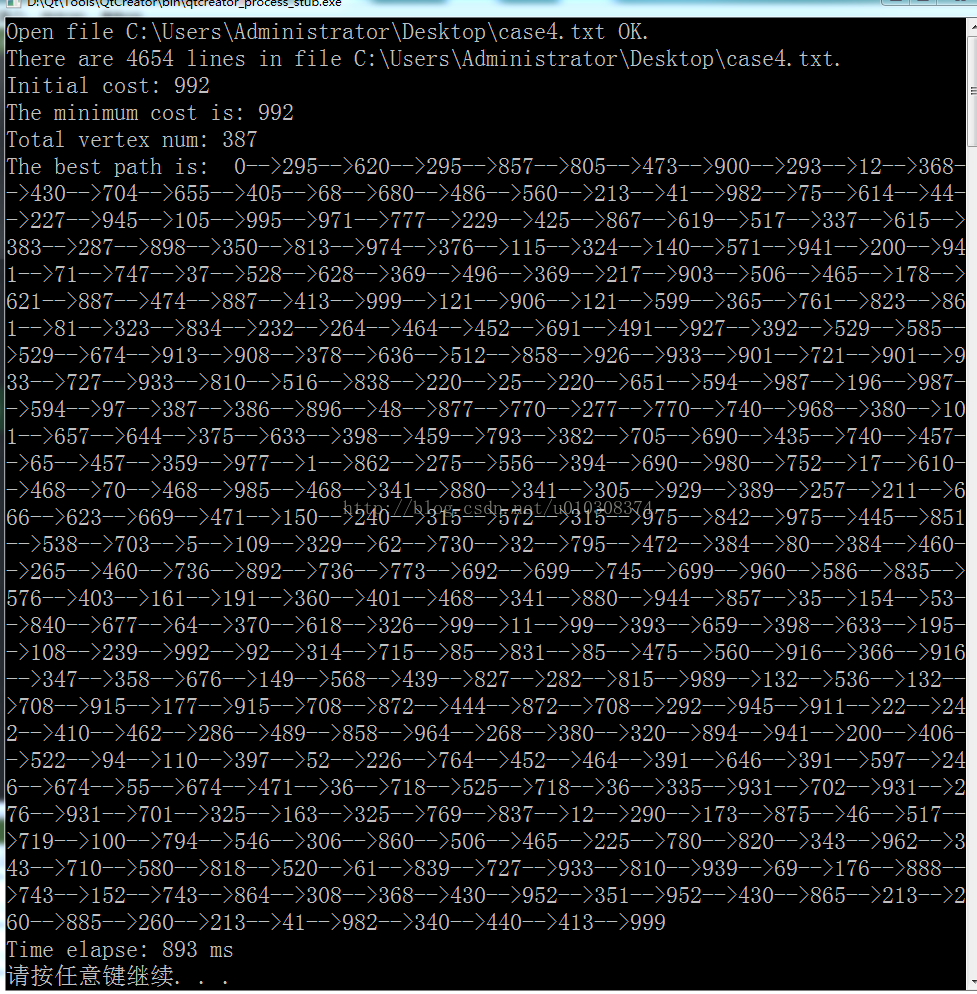
运行结果:
注:以上用例是ShooterIT大神提供,初写博客,太水,大佬勿喷~