FPGA - Zynq - 加载 - FSBL源码解析1
FPGA - Zynq - 加载 - FSBL源码解析1
- 前文回顾
- FSBL的数据段和代码段如何链接
- 建个Example工程,不要光顾着看,自己动动手掌握的更快。
- 查看链接文件,原来存储空间是这样有条不紊的被分配
- ARM要开始运行FSBL了,然而并不是main()
- 终于要开始进入main()了,激动不?
- 小节
前文回顾
上一篇博客介绍了BootROM是如果搜索并利用BootROM Header来加载FSBL到OCM(on chip memory),最后将cpu的控制权交给FSBL。那么后续关于加载的研究就来到了FSBL的源码解析上,可能一篇博客写不完,会分成好几个小节来全面解析。 敬请期待,接下来话不多说,让我们把注意力集中到FSBL本身。
FSBL的数据段和代码段如何链接
搞懂数据段和代码段是如何被链接成一个二进制文件的,这应该是每一个ARM程序员必须搞清楚的一个事情。它会帮助程序员更加透彻的知道ARM是怎么被安排去工作的,所以数据段你和代码段如何链接在一起,是我们搞懂FSBL的第一步。
建个Example工程,不要光顾着看,自己动动手掌握的更快。
要回答这个问题其实必须要建一个工程,相关的软件操作流程可以参考各种开发板的实验手册,我这里见得描述一下:
-
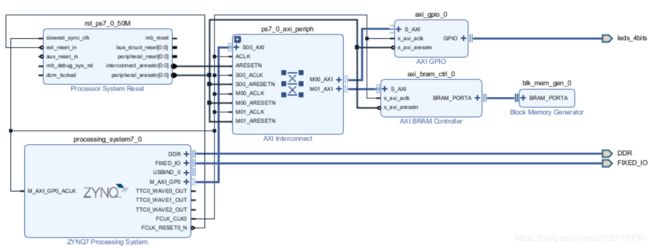
现在VIVADO里面新建一个PL工程,可以自己搭,也可以用范例,本小节所涉及的PL来自范例,如下所示,整个PL实际上由:
1.1 ARM部分(硬核+外设),如图中所示的processing_system,其中就包含了除APU以外,还有DDR,以及FIXED_IO。 DDR好理解,就是连接外部DDR存储器呗,那这个FIXED_IO是个啥呢?这个实际上就是arm的外设,包含了Q-spi的必要引脚,也包括了Debug Info所需的串口。总而言之都是ARM的外设
1.2 复位部分,看名字就很好理解,该模块专门用于所以Zynq的PL部分部件的复位
1.3 AXI Interconnect,这个模块非常重要,简单地说这就是一个总线解析器,一主(一个master AXI4)多从(两个slave AXI4)。我们之前提到过,AXI4将会用于连接Zynq的PS(ARM部分)和PL(FPGA部分),这里就是一个例子,后面每一个Slave AXI4都连着一个 Xilinx 的IP,或者是用户自定义的具备AXI4的IP。这样就简单了,只要用户定义的IP包含AXI4接口,同时将必要的可读或者可写数据映射到这个AXI4接口上,那么Zynq的ARM就能够通过总线接触到这些映射到总线上的数据,it means the ARM could read/write its content mapped on the Bus of AXI4.
1.4 AXI GPIO & AXI BRAM Controller, 这两个就是上述的Xilinx的IP,自带有AXI4总线接口,这样ARM就能够通过总线解析器控制他们
1.5 实际的应用,其实也不会比这个在复杂太多,只是再加一些自定义的IP
-
利用这个范例,我们进一步建立BSP,然后基于BSP建立APP(用户程序),以及FSBL(范例,Zynq的加载程序),如下图所示,其包含了app, bsp, platform, fsbl。通过任何一个开发版的用户手册都可以获得完整的工程建立流程,这里不再赘述。
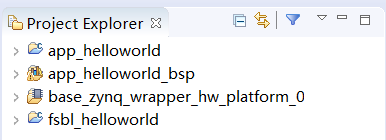
-
其中bsp和fsbl里面,包含加载过程中所用到的所有源码,下面一一解析。
查看链接文件,原来存储空间是这样有条不紊的被分配
点击FSBL->src->lscript.ld,界面上将会呈现(这里的SDK是2017.2版本):
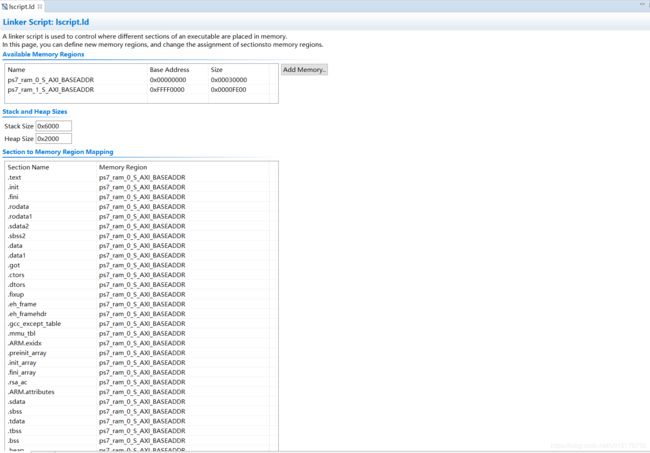 感谢这个SDK的开发工具,使得用户能够以图表的方式去查看数据段和代码段的具体分布(以前都是通过直接看源码,毕竟科技进步了~),不过老程序员可能更喜欢看源码,那我们就结合的看吧
感谢这个SDK的开发工具,使得用户能够以图表的方式去查看数据段和代码段的具体分布(以前都是通过直接看源码,毕竟科技进步了~),不过老程序员可能更喜欢看源码,那我们就结合的看吧
这个图主要呈现了三部分内容:
- 定义了两个存储空间,包括offset和length,其源码表达如下
MEMORY
{
ps7_ram_0_S_AXI_BASEADDR : ORIGIN = 0x00000000, LENGTH = 0x00030000
ps7_ram_1_S_AXI_BASEADDR : ORIGIN = 0xFFFF0000, LENGTH = 0x0000FE00
}
- 接下来定义了堆栈的大小,忘了啥是堆栈的可以自行百度复习一下
_STACK_SIZE = DEFINED(_STACK_SIZE) ? _STACK_SIZE : 0x6000;
_HEAP_SIZE = DEFINED(_HEAP_SIZE) ? _HEAP_SIZE : 0x2000;
- 接下来就是将FSBL编译完成后的所有数据和代码,按照一定的顺序链接生成二进制文件,举个例子:
ENTRY(_vector_table)
SECTIONS
{
.text : {
*(.vectors)
*(.boot)
*(.text)
*(.text.*)
*(.gnu.linkonce.t.*)
*(.plt)
*(.gnu_warning)
*(.gcc_execpt_table)
*(.glue_7)
*(.glue_7t)
*(.vfp11_veneer)
*(.ARM.extab)
*(.gnu.linkonce.armextab.*)
} > ps7_ram_0_S_AXI_BASEADDR
上面的源码的作用是:
(1)定义FSBL的程序入口在== _vector_table ==
(2)将代码段(.text*)链接到ps7_ram_0_S_AXI_BASEADDR的最前头,而这里的代码段实际包含了.vector等等内容,我们查看一下.vectors到底是个啥吧,搜索一下把,结果就在bsp的asm_vectors.S(汇编文件里面)
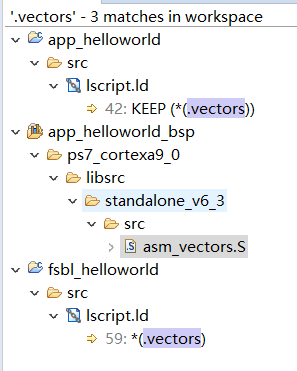
进到这个汇编程序,如下所示:
#include "xil_errata.h"
#define __ARM_NEON__ 1
.org 0
.text
.globl _vector_table
.section .vectors
_vector_table:
B _boot
B Undefined
B SVCHandler
B PrefetchAbortHandler
B DataAbortHandler
NOP /* Placeholder for address exception vector*/
B IRQHandler
B FIQHandler
这里先关注两个名字,一个就是==.vectors==,另一个就是==_vector_table==
看下面的源码可知,.vectors就是一个.section,相当于下面所有的汇编源码取了一个别名,叫做.vectors,这些源码最终被放置到了上述位置!
第二个需要关注的是_vector_table,其实际上就是全局变量(看下面的源码.globl _vector_table ),这个全局变量在这里就是一个指针,指向了 B _boot 这个操作。
同时回过头看上面的源码ENTRY(_vector_table),这就是定义了FSBL的程序入口,也就是cpu执行的第一条指令保存在 _vector_table -----> B _boot
这里可以简单的小结一下, FSBL执行的第一条指令就是B _boot,这是通过查看(编写)FSBL->src->lscript.ld才获悉的,可想而知这个链接文件有多重要,后期等我们更加熟悉,可以尝试一下取修改它,这里做个记号,继续往下走!
ARM要开始运行FSBL了,然而并不是main()
上面已经提及实际FSBL程序最先被执行的语句是B _boot,这是一条汇编指令,意思就是说跳转到 _boot程序块,同时转跳指令B是无需返回的,所以后续B Undefined啥的实际上并不会被执行,看一下**_boot**是什么:
#if XPAR_CPU_ID==0
/* only allow cpu0 through */
mrc p15,0,r1,c0,c0,5
and r1, r1, #0xf
cmp r1, #0
beq CheckEFUSE
EndlessLoop0:
wfe
b EndlessLoop0
CheckEFUSE:
ldr r0,=EFUSEStaus
ldr r1,[r0] /* Read eFuse setting */
ands r1,r1,#0x80 /* Check whether device is having single core */
beq OKToRun
......
......
......
......
......
......
b _start /* jump to C startup code */
and r0, r0, r0 /* no op */
.Ldone: b .Ldone /* Paranoia: we should never get here */
汇编语言不是笔者的强项,因此只能大概说明一下(有兴趣的可以自己逐条查看作用,过程会比较痛苦。方式能收获更多CPU底层的细节,这里不展开):
- 针对CPU0和CPU1有不同的程序,基本就是CPU0干活,CPU1就是WFE
- CPU干的活就是初始化MMU和TLB等等,其中比较关键的就是初始化堆栈(SP寄存器指向栈顶),前面也提及过,在链接的时候分配了堆栈空间,而堆栈对C语言函数是非常重要的。栈的作用:一般来说函数调用或者中断,都会涉及到现场保护和现场恢复,被保护的现场实际上就是CPU的几个专用的reg,以及正在执行的函数的局部变量等数据,这些数据会被推进栈内,其相应的SP寄存器也会加上入栈数据的长度,在函数执行返回挥着中断返回时,栈内的数据按顺序再次出来,总体来说就是先进后出。而堆的作用一般就是给系统动态分配存储空间的,包括用户经常调用的malloc说分配的空间,就是在堆里。简而言之,堆栈的完成初始化是为了c语言函数提供了环境。否则C语言是无法正确被执行的。
- 完成上面一系列的功能后,开始一执行去第一条C语言函数**_start**,见下面的汇编代码
.globl _start
_start:
bl __cpu_init /* Initialize the CPU first (BSP provides this) */
mov r0, #0
/* clear sbss */
ldr r1,.Lsbss_start /* calculate beginning of the SBSS */
ldr r2,.Lsbss_end /* calculate end of the SBSS */
.Lloop_sbss:
cmp r1,r2
bge .Lenclsbss /* If no SBSS, no clearing required */
str r0, [r1], #4
b .Lloop_sbss
.Lenclsbss:
/* clear bss */
ldr r1,.Lbss_start /* calculate beginning of the BSS */
ldr r2,.Lbss_end /* calculate end of the BSS */
.Lloop_bss:
cmp r1,r2
bge .Lenclbss /* If no BSS, no clearing required */
str r0, [r1], #4
b .Lloop_bss
.Lenclbss:
/* set stack pointer */
ldr r13,.Lstack /* stack address */
/* Reset and start Global Timer */
mov r0, #0x0
mov r1, #0x0
#if USE_AMP != 1
bl XTime_SetTime
#endif
#ifdef PROFILING /* defined in Makefile */
/* Setup profiling stuff */
bl _profile_init
#endif /* PROFILING */
/* run global constructors */
bl __libc_init_array
/* make sure argc and argv are valid */
mov r0, #0
mov r1, #0
/* Let her rip */
bl main
/* Cleanup global constructors */
bl __libc_fini_array
#ifdef PROFILING
/* Cleanup profiling stuff */
bl _profile_clean
#endif /* PROFILING */
/* All done */
bl exit
.Lexit: /* should never get here */
b .Lexit
.Lstart:
.size _start,.Lstart-_start
一样的,我们不仔细展开这段汇编,其实通过注释就能够明白,这里的主要功能就是初始化各种数据,包括bss等等。最后,汇编来到了main,这个main就是FSBL的主函数,也就是大家比较熟悉的c语言函数。
小结,实际上BSP在背后干了好多事情(上述所有的汇编都是bsp提供的),这是为了让用户能够忽略一些技术细节,直奔主题main。而这些技术细节已经有Xilinx官方为我们完整无误的准备好了,所以FSBL我们其实只用聚焦在main函数即可,其他的脏活累活BSP已经替我们完成了,我们用不用太操心。不过通过上面的一些展开,大伙儿应该也有了一个模糊的概念,也就是说虽然我们写的所有的函数都是从main函数开始,然后CPU执行的第一条指令,绝对不是main,而是最基础的汇编。这个汇编会替你搞定c语言环境,让我们的main能够很ojbk的运行。下次把目光回到main函数
终于要开始进入main()了,激动不?
费话不多讲,直接怼源码,如下所示
int main(void)
{
u32 BootModeRegister = 0;
u32 HandoffAddress = 0;
u32 Status = XST_SUCCESS;
/*
* PCW initialization for MIO,PLL,CLK and DDR
*/
Status = ps7_init();
//......
// to be continued next blog...
//......
}
逐条怼:
一开始就定义了三个变量,这三个变量的作用请看下面的注释
u32 BootModeRegister = 0;// 用来存放boot的模式,到底是Qspi还是NOR等等门后面会具体讲
u32 HandoffAddress = 0;// 用来存放FSBL运行完毕以后,下一个镜像执行的地址,这个应该会很后面再讲
u32 Status = XST_SUCCESS;//存放操作是否成功的标志,一旦失败基本就是打印信息然后non-POR
next, 接下来开始初始化MIO,PLL,CLK和DDR,调用的函数就是ps7_init()
/*
* PCW initialization for MIO,PLL,CLK and DDR
*/
Status = ps7_init();
if (Status != FSBL_PS7_INIT_SUCCESS) {
fsbl_printf(DEBUG_GENERAL,"PS7_INIT_FAIL : %s\r\n",
getPS7MessageInfo(Status));
OutputStatus(PS7_INIT_FAIL);
/*
* Calling FsblHookFallback instead of Fallback
* since, devcfg driver is not yet initialized
*/
FsblHookFallback();
}
如果看过我们上一篇blog应该有个印象,MIO不是已经被初始化过一遍吗,怎么又要?是的,就是这么灵活,也就是说你的FSBL可以在Qspi(这样BootROM只会初始化Qspi的接口MIO)里,你的BitStream可以保存在eMMC上,那这个多出来的eMMC的MIO也需要在初始化一下了。不多讲,直接看ps7_init()
int
ps7_init()
{
// Get the PS_VERSION on run time
unsigned long si_ver = ps7GetSiliconVersion ();
int ret;
//int pcw_ver = 0;
if (si_ver == PCW_SILICON_VERSION_1) {
ps7_mio_init_data = ps7_mio_init_data_1_0;
ps7_pll_init_data = ps7_pll_init_data_1_0;
ps7_clock_init_data = ps7_clock_init_data_1_0;
ps7_ddr_init_data = ps7_ddr_init_data_1_0;
ps7_peripherals_init_data = ps7_peripherals_init_data_1_0;
//pcw_ver = 1;
} else if (si_ver == PCW_SILICON_VERSION_2) {
ps7_mio_init_data = ps7_mio_init_data_2_0;
ps7_pll_init_data = ps7_pll_init_data_2_0;
ps7_clock_init_data = ps7_clock_init_data_2_0;
ps7_ddr_init_data = ps7_ddr_init_data_2_0;
ps7_peripherals_init_data = ps7_peripherals_init_data_2_0;
//pcw_ver = 2;
} else {
ps7_mio_init_data = ps7_mio_init_data_3_0;
ps7_pll_init_data = ps7_pll_init_data_3_0;
ps7_clock_init_data = ps7_clock_init_data_3_0;
ps7_ddr_init_data = ps7_ddr_init_data_3_0;
ps7_peripherals_init_data = ps7_peripherals_init_data_3_0;
//pcw_ver = 3;
}
// MIO init
ret = ps7_config (ps7_mio_init_data);
if (ret != PS7_INIT_SUCCESS) return ret;
// PLL init
ret = ps7_config (ps7_pll_init_data);
if (ret != PS7_INIT_SUCCESS) return ret;
// Clock init
ret = ps7_config (ps7_clock_init_data);
if (ret != PS7_INIT_SUCCESS) return ret;
// DDR init
ret = ps7_config (ps7_ddr_init_data);
if (ret != PS7_INIT_SUCCESS) return ret;
// Peripherals init
ret = ps7_config (ps7_peripherals_init_data);
if (ret != PS7_INIT_SUCCESS) return ret;
//xil_printf ("\n PCW Silicon Version : %d.0", pcw_ver);
return PS7_INIT_SUCCESS;
}
该函数主要完成:
- 读取PS版本,估计一些老料子的方式略有不同吧
- 根据PS版本,赋予相对应初始化数组的指针。这个数组基本上构成举例(ps7_mio_init_data_1_0)如下
unsigned long ps7_mio_init_data_1_0[] = {
// START: top
// .. START: SLCR SETTINGS
// .. UNLOCK_KEY = 0XDF0D
// .. ==> 0XF8000008[15:0] = 0x0000DF0DU
// .. ==> MASK : 0x0000FFFFU VAL : 0x0000DF0DU
// ..
EMIT_WRITE(0XF8000008, 0x0000DF0DU),
可以简单的理解为,这个ps7_mio_init_data_1_0数组中的而每一个元素都是一种操作,这个操作包含了EMIT_WRITE,EMIT_READ等等。比如说EMIT_WRITE,为了完成这个操作,实际上包含了3个元素,操作指令码+地址+数据(不同的操作包含的数据不同,有些操作会有四个元素)。
#define EMIT_WRITE(addr,val) ( (OPCODE_WRITE << 4 ) | 2 ) , addr, val
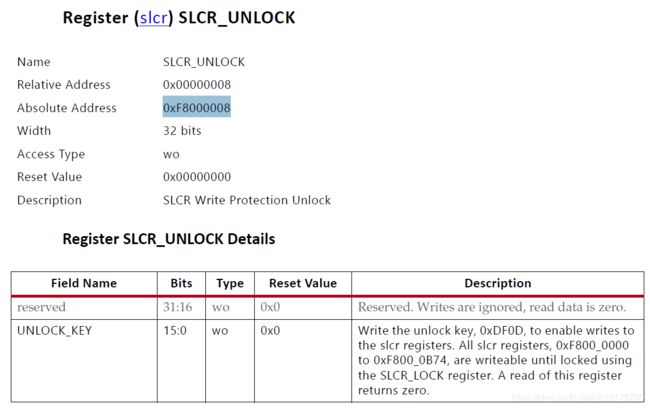
其想要实现的功能就是往addr write val,比如说EMIT_WRITE(0XF8000008, 0x0000DF0DU),其想要实现的功能就是将地址0XF8000008上的数据写为0x0000DF0DU
而0XF8000008这个地址,通过查看TRM,实际上就是给SCLR_UNLOCK寄存器写入0xDF0D,目的就是为了解锁SCLR所有的寄存器,使其可写,也就是说没有完成这一步的话,SCLR的其余寄存器使不允许写操作的!
Xilinx希望通过这种比较奇怪的方式完成了一系列操作(EMIT_WRITE和其他操作)的封装成一个组合(ps7_mio_init_data_1_0),这一些列的操作共同完成了比如说MIO的初始化,DDR的初始化等等。同时Xilinx提供了一个函数去解读这些操作,**ps7_config ()**正是为了实现这个功能,如下所示,利用ps7_config ()和ps7_mio_init_data来完成MIO的初始化
// MIO init , include in ps7_init()
ret = ps7_config (ps7_mio_init_data);
if (ret != PS7_INIT_SUCCESS) return ret;
下面来看一下ps7_config()
int
ps7_config(unsigned long * ps7_config_init)
{
unsigned long *ptr = ps7_config_init;
unsigned long opcode; // current instruction ..
unsigned long args[16]; // no opcode has so many args ...
int numargs; // number of arguments of this instruction
int j; // general purpose index
volatile unsigned long *addr; // some variable to make code readable
unsigned long val,mask; // some variable to make code readable
int finish = -1 ; // loop while this is negative !
int i = 0; // Timeout variable
while( finish < 0 ) {
numargs = ptr[0] & 0xF;
opcode = ptr[0] >> 4;
for( j = 0 ; j < numargs ; j ++ )
args[j] = ptr[j+1];
ptr += numargs + 1;
switch ( opcode ) {
case OPCODE_EXIT:
finish = PS7_INIT_SUCCESS;
break;
case OPCODE_CLEAR:
addr = (unsigned long*) args[0];
*addr = 0;
break;
case OPCODE_WRITE:
addr = (unsigned long*) args[0];
val = args[1];
*addr = val;
break;
case OPCODE_MASKWRITE:
addr = (unsigned long*) args[0];
mask = args[1];
val = args[2];
*addr = ( val & mask ) | ( *addr & ~mask);
break;
case OPCODE_MASKPOLL:
addr = (unsigned long*) args[0];
mask = args[1];
i = 0;
while (!(*addr & mask)) {
if (i == PS7_MASK_POLL_TIME) {
finish = PS7_INIT_TIMEOUT;
break;
}
i++;
}
break;
case OPCODE_MASKDELAY:
addr = (unsigned long*) args[0];
mask = args[1];
int delay = get_number_of_cycles_for_delay(mask);
perf_reset_and_start_timer();
while ((*addr < delay)) {
}
break;
default:
finish = PS7_INIT_CORRUPT;
break;
}
}
return finish;
}
该函数很简单,实际上就是EMIT_WRITE,EMIT_EXIT,EMIT_READ等一系列操作的解包过程,有兴趣的可以深入查看一下。需要注意的是,最后一个操作一定是EMIT_EXIT,也就是说不管是ps7_mio_init_data还是ps7_pll_init_data,这些数组的最后一个元素(操作)一定是EMIT_EXIT,读者可自行检查。
小节
Xilinx利用了一种非常不常见的方式完成了部分(MIO或者DDR)初始化,究其原因可能是这部分初始化工作是固定的,所以什么可读性啊都不需要了? 既然xilinx这么干了,我们看得懂就行了,这种方式极其不推荐。
main的后续操作,会在以后的blog中在详细解释,敬请期待。