opencv dnn模块 示例(3) 目标检测 object_detection (2) YOLO object detection
opencv4.2 的dnn支持cuda加速,见博客 opencv dnn模块 示例(15) opencv4.2版本dnn支持cuda加速
一、opencv的示例模型文件
opencv的dnn模块读取models.yml文件中包含的目标检测模型有5种,这里实例yolo网络。
YOLO object detection family from Darknet
(https://pjreddie.com/darknet/yolo/)
Might be used for all YOLOv2, TinyYolov2 and YOLOv3
- yolo:
model: “yolov3.weights”
config: “yolov3.cfg”
mean: [0, 0, 0]
scale: 0.00392
width: 416
height: 416
rgb: true
classes: “object_detection_classes_yolov3.txt”
sample: “object_detection” - tiny-yolo-voc:
model: “tiny-yolo-voc.weights”
config: “tiny-yolo-voc.cfg”
mean: [0, 0, 0]
scale: 0.00392
width: 416
height: 416
rgb: true
classes: “object_detection_classes_pascal_voc.txt”
sample: “object_detection”
二、示例代码
YOLO object detection
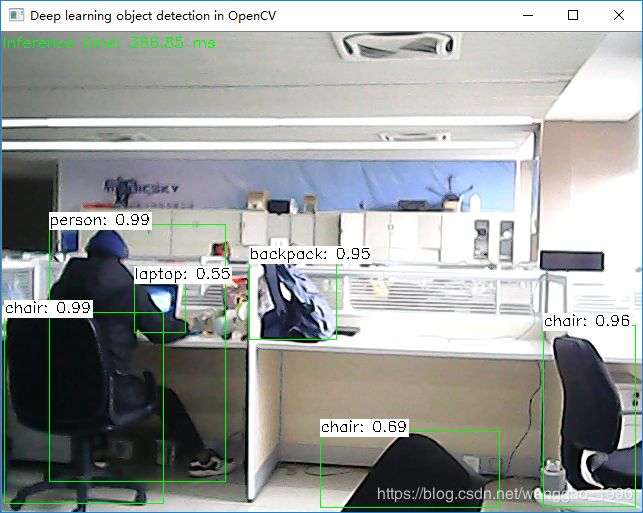
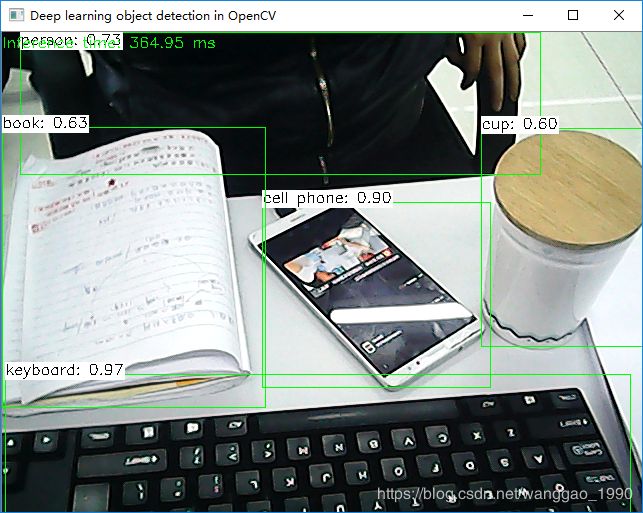
#include 三、演示
YOLO v3 效果最好,CPU/OPENCL 都在350ms左右。cpu 25%, 内存680M, GPU 45%。
另外的模型检测速度快,但是准确率有下降。