openCV+Python 数字图像处理(1)——图像基本操作(读入显示保存、属性读取、均值标准差、取反、色彩空间转换、提取颜色、通道分离与合并)
图像基本操作
- 1.基本操作
- 2.代码示例
- 3.结果展示
包括图像的读入、显示、保存,获取图片大小、通道数等属性,求取图像均值、标准差,遍历图像各个像素,图像取反,图像色彩空间转换,提取某种颜色,通道分离与合并等
1.基本操作
- (1)读入图像
# 默认的读入格式是BGR
img1 = cv2.imread('E:/PycharmProjects/one.jpg')- (2)显示图像
cv2.imshow(‘winname’, img)
cv2.waitKey(0)
cv2.destroyAllWindows()cv2.imshow(winname, mat) 有窗口名和图片两个参数,不要忘记第一个参数
cv2.waitKey(delay: Any = None) 等待键盘输入。参数为延迟时间,单位为ms。参数为0时表示一直等到有键盘任意输入再进行下一操作。
- (3)保存图像
cv2.imwrite('E:/PycharmProjects/one.png', img1)cv2.imwrite(filename, img) 有文件名和图片两个参数,通过设定文件名的后缀可以转换图片格式
- (4)获取图片属性
def img_info(img):
print('type:', type(img))
print('img.size:', img.size)
print('img.dtype:', img.dtype)
print('img.shape', img.shape)
img_info(img1)type( ): 获取对象类型,图像类型为numpy.ndarray
.shape: h, w, c 高度、宽度、通道数,最常用
.size: 图像像素总数
.dtype: 数据类型,默认为uint8
- (5)图像求均值、标准差
mean_img = cv2.mean(img)
m, stddev = cv2.meanStdDev(img)图像有三个通道时,结果为三个通道分别求均值和标准差
- (6)遍历图像各个像素且取反
import cv2
import numpy as np
img1 = cv2.imread('E:/PycharmProjects/one.jpg')
def reverse_img(img):
h, w, c = img.shape
r_img = np.ones([h, w, c], dtype=np.uint8)#要注意dtype为np.uint8,否则图像无法正常显示
print(r_img.dtype)
print(r_img)
print(r_img.shape)
for row in range(h):
for col in range(w):
for ch in range(c):
r_img[row, col, ch] = 255-img[row, col, ch]
print(r_img.dtype)
show('reverse_img', r_img)
reverse_img(img1)- (7)图像取反
ot_img1 = cv2.bitwise_not(img1)- (8)图像色彩空间转换
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)HSV(Hue, Saturation, Value)色彩空间,H(色调),S(饱和度),V(明度)
- (9)提取图像中某种颜色
low = np.array([0, 0, 0])
up = np.array([255, 100, 100])
blue_img1 = cv2.inRange(img1, low, up)cv2.inRange(src: Any, lowerb: Any, upperb: Any, dst: Any = None)lowerb, upperb: numpy.ndarray类型
HSV基本颜色分量范围: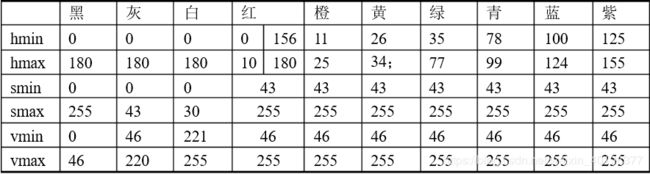
- (10)通道分离与合并
b, g, r = cv2.split(img)
merge_img = cv2.merge([b, g, r])2.代码示例
import cv2
import numpy as np
# 1.读入图片和保存图片
img1 = cv2.imread('E:/PycharmProjects/one.jpg')
# 2.显示图片
def show(name, img):
cv2.imshow(name, img)
cv2.waitKey(0)
show('img1', img1)
# 3.保存图像
cv2.imwrite('E:/PycharmProjects/one.png', img1)
# 4.获取图片属性
def img_info(img):
print('type:', type(img))
print('img.size:', img.size)
print('img.dtype:', img.dtype)
print('img.shape', img.shape)
img_info(img1)
# 5.图像求均值、标准差
def mean_dev(img):
mean_img = cv2.mean(img)
print('mean', mean_img)
m, stddev = cv2.meanStdDev(img)
print('m', m, '\n', 'StdDev', stddev)
mean_dev(img1)
# 6.遍历图像各个像素且取反(有问题)
def reverse_img(img):
h, w, c = img.shape
r_img = np.zeros([h, w, c])
for row in range(h):
for col in range(w):
for ch in range(c):
r_img[row, col, ch] = 255-img[row, col, ch]
show('reverse_img', r_img)
# reverse_img(img1)
# 7.openCV取反函数
def not_img(img):
not_img = cv2.bitwise_not(img)
show('not_img', not_img)
not_img(img1)
# 8.图像色彩空间转换
def color_cvt_img(img):
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
show('gray', gray)
show('hsv', hsv)
color_cvt_img(img1)
# 9.对图片的某种颜色进行提取
def color_inrange(img):
low = np.array([0, 0, 0])
up = np.array([255, 100, 100])
blue_img1 = cv2.inRange(img1, low, up)
show('blue_img1', blue_img1)
color_inrange(img1)
# 10.通道分离、合并
def img_channel(img):
b, g, r = cv2.split(img)
show('blue', b)
print('blue.shape', b.shape)
merge_img = cv2.merge([b, g, r])
show('merge_img', merge_img)
img_channel(img1)3.结果展示