linux驱动程序和应用程序交互实现_基于2440
在学习安卓时候对驱动还是有疑惑 ,用jz2440重写驱动
板子:jz2440
系统:ubutu16
最后所有代码在底部
先配置板子uboot能与主机互相联通
如果配置是
开发版 192.168.31.10
电脑 192.168.31.5
2440_ubuntu 192.168.31.51
4412 192.168.31.200
配置uboot的ip和服务器ip
set ipaddr 192.168.31.10
set serverip 192.168.31.51
setenv netmask 255.255.255.0
setenv gatewayip 192.168.31.1
save

ping 的到虚拟机
可以使用nfs挂载根目录 板子启动根文件系统在主机上方便传输,也可以不弄,在windos传输
进入uboot 输入print

bootarg root(根文件系统)在nandflash上 改为在虚拟机上
bootcmd 启动内核的命令
进入板子的linux 用nfs传输文件
mount -t nfs -o intr,nolock,rsize=1024,wsize=1024 192.168.31.51:/work/nfs_root /mnt

根据button_test.c 编译出可执行驱动的文件 button_test
执行make命令生成驱动文件

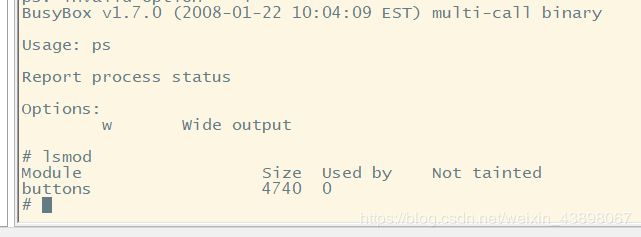
装载驱动文件
insmod buttons.ko
用 lsmod 查看装载了没有
cat /proc/devices

分配给我的设备号是252
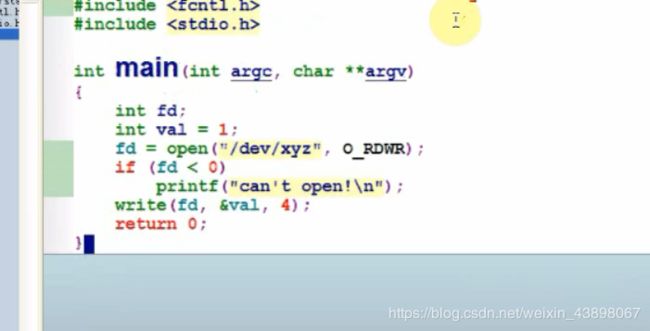
在main函数中 要打开dev/buttons
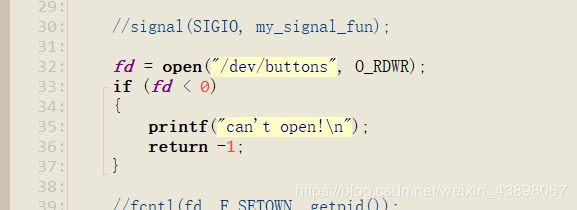
查看是否有这个设备节点

现在已经有了如果没有手工创建设备节点
mknod /dev/buttons c 252 0
代码里有自动创建设备节点
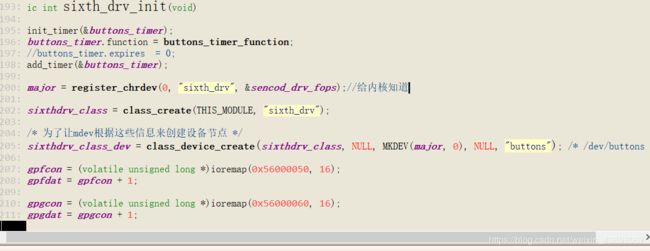
register_chrdev 分配主设备号,给内核知道,把驱动注册进内核数组
class_create 创建一个/sys/class/sixth_dev的类,类下面生成buttons设备
class_device_create 创建/dev/buttons 文件,给 app 的 fb = open() 使用


里面有主设备号信息次设备号信息

mdev根据这些设备信息生成设备节点
系统自带的热拔插程序 当有了设备信息后 自动生成设备节点 应用程序只要名字对了,打开里面的设备节点就能使用

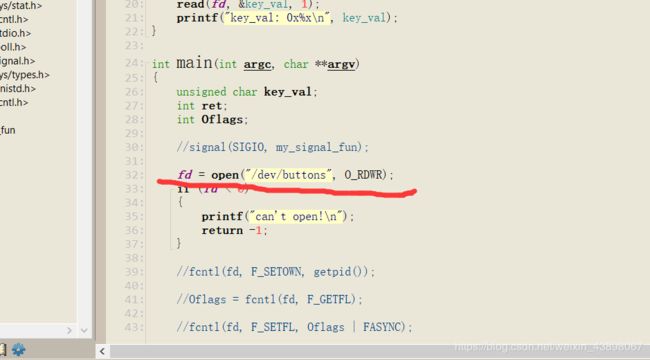
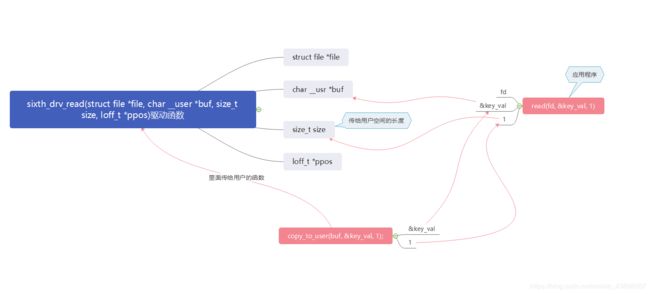
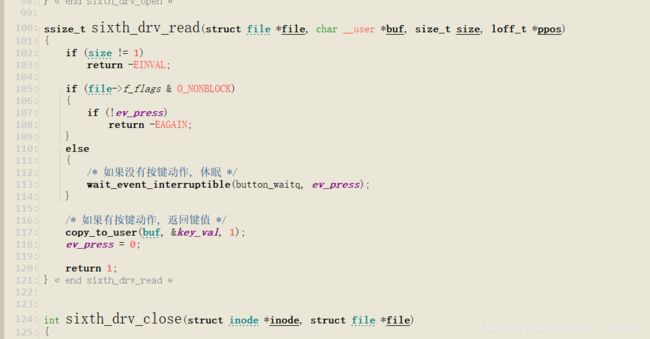
驱动和应用程序交换数据
在驱动程序里里有 copy_to_usr copy_from_usr 对应着应用程序里的read write
copy_to_usr( to, &from, sizeof(from))
To:用户空间函数 (可以是数组)
From:内核空间函数(可以是数组)
sizeof(from):内核空间要传递的数组的长度
驱动代码
应用代码

copy_from_usr(&from , to , sizeof(to) )
To:用户空间函数 (可以是数组)
From:内核空间函数(可以是数组)
sizeof(from):内核空间要传递的数组的长度
驱动代码

应用代码
button_test.c
#include button.c(驱动文件,用makefile编译)
#include makefile
KERN_DIR = /work/system/linux-2.6.22.6
all:
make -C $(KERN_DIR) M=`pwd` modules
clean:
make -C $(KERN_DIR) M=`pwd` modules clean
rm -rf modules.order
obj-m += buttons.o
KERM_DIR是驱动程序要根据所用内核才能编译出 虚拟机里要有这个内核