数电课程设计——汽车尾灯
第一部分系统设计
1.1 设计题目及要求
设计一个汽车尾灯控制电路,尾灯共有六个,左右各三个。基本要求为:
1、正常行驶和停车时指示灯全灭。
2、汽车左转弯和右转弯时以动态流水灯形式指示转弯和转弯方向。
3、汽车刹车时使所有尾灯闪烁,提醒后边的车辆防止追尾。
1.2 总体设计方案
1.2.1 设计思路
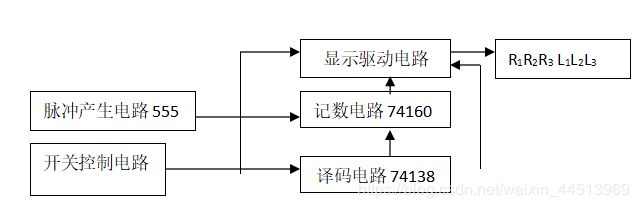
此设计任务是设计一个汽车尾灯控制电路,在芯片型号均不限的情况下实现对汽车尾灯显示状态的控制。电路大致由控制电路、计数器、显示电路等模块组成。在左右各三个指示灯的基础上,实现汽车运行的基本三种情况,即 :正常行驶,停车,左、右转弯,刹车。 汽车尾灯电路有左转、右转、刹车、误动作四种状态,所以用一片74138译码器来产生四种控制状态;右转灯一共有三盏,而且工作时是按从左往右的顺序亮的,所以用一片74160产生不同的频率,分别控制每盏灯。左转电路与右转电路类似。
1.2.2 设计方案
方案一:
分析以上设计任务,由于汽车左转弯、右转弯、刹车时,所有灯点亮地次序和是否点亮是不同地,所以用74138译码器对输入地信号进行译码,从而得到一个低电平输出,再由这个低电平控制一个计数器74160,计数器输出为高电平时就点亮不同地尾灯(这里用发光二极管模拟),从而控制尾灯按要求点亮.由此得出在每种运行状态下,各指示灯与给定条件间地关系。

方案二:
通过单片机实现对LED的控制简单易行,而且稳定性很高。可以很容易的控制LED的闪烁方式,通过独立按键来模拟左右转及刹车,并给单片机产生外部中断。故此电路可以使用单片机来实现。
1.2.3 方案论证与比较
由于单片机的设计暂时不在学习范围内,故在可行性的情况下选择方案一。电路用的器件都为常规器件,只需与门和非门,电路简单。电路工作稳定,功耗低。控制电路主要由一片74138组成,分别产生置零、左转、右转、报警和刹车五种信号;计数电路由两片74160组成,左右分别有一片,74160接成4进制,并用预置数端置零,产生的00、01、10、11四种信号分别通过与门和非门的组合来控制三盏灯按要求亮。信号从74138到74160再到各个灯。
分析上述两种方案,方案二更加符合本次课程设计要求,故采用方案二。
第二部分 单元电路设计
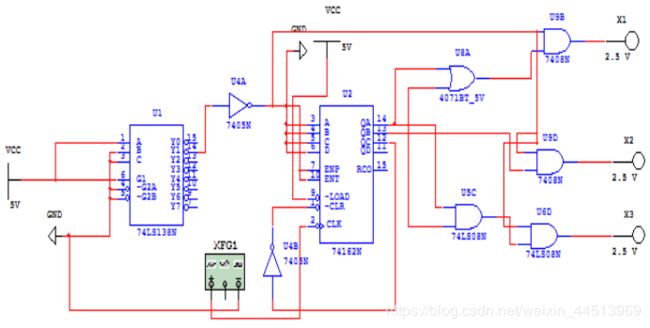
2.1 控制电路
2.1.1 控制电路及其工作原理或功能说明
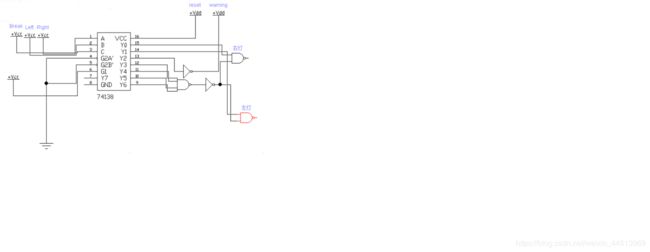
74138的A B C端分别接右转、左转、刹车控制信号,输出端Y0产生置零信号,Y1产生右转信号,Y2产生左转信号,Y3产生误动作报警信号,Y4~Y7产生刹车信号,此时不管左转和右转控制开关处于什么状态,刹车信号都控制灯亮。
2.1.2 控制电路元件的选取与计算
当=000时候汽车处于正常行驶,尾灯完全处于熄灭状态,所以通过74138译码后为“11111110”不做任何处理。
当 =001时候汽车左转,所以汽车尾灯地左面3个灯按照L1→L1L2→L1L2L3→全灭→L1……顺序循环点亮。具体实现是通过74138对“001”译码为“11111101”然后通过译码后地低电平Y1通过一个非门控制计数器74160地ENT和ENP端开始计数,从而控制灯地点亮方式,计数范围为0000(全灭)→0001(L1点亮)→0010(L1L2点亮)→0011(L1L2L3点亮)→0100(异步清零)→0000……循环计数就实现了循环点亮地这个过程。由于记数脉冲是由555定时器产生地频率约为2HZ方波,所以循环点亮这个过程所需要地时间约为0.5S*4。AQX74J0X
当=010时候汽车右转,所以汽车尾灯右面3个灯按照R1→R1R2→R1R2R3→全灭→R1……顺序循环点亮,具体实现是通过74138对“010”译码为“11111011” 然后通过译码后地低电平Y2通过一个非门控制计数器74160地ENT和ENP端开始计数,从而控制灯地点亮方式,计数范围为0000(全灭)→0001(R1点亮)→0010(R1R2点亮)→0011(R1R2R3点亮)→0100(异步清零)→0000……循环计数就实现了循环点亮地这个过程,由于记数脉冲是由555定时器产生地频率约为2HZ方波,所以循环点亮这个过程所需要地时间约为0.5S*4。
当=011时候汽车处于刹车状态或者处于检测汽车尾灯是否正常,所以汽车地尾灯全亮,具体实现是通过74138对“011”译码为“11110111”然后通过译码后地低电平Y3通过一个非门直接控制所有地尾灯点亮。ZB2Ltk
当=100时候汽车处于倒车状态,倒车地时候汽车所有地尾灯按照转弯时候地顺序点亮灯.具体实现是通过74138对“100”译码为“11101111”然后通过译码后地低电平Y4通过一个非门控制另外一片计数器74160地ENT和ENP端开始计数,从而控制灯地点亮方式,计数范围为0000(全灭)→000(R1,L1点亮)→0010(R1R2,L1L2点亮)→0011(R1R2R3.L1L2L3点亮)→0100(异步清零)→0000……循环计数就实现了循环点亮地这个过程。由于记数脉冲是由555定时器产生地频率约为2HZ方波,所以循环点亮这个过程所需要地时间约为0.5S*4。yn14ZNXI
当 =101时候汽车处于晚上行车状态,此时汽车尾灯地左右两端地最下面一个灯一直点亮即L3.R3一直处于亮地状态.具体实现是通过74138对“101”译码为“11011111”然后通过译码后地低电平Y5通过一个非门直接控制L3.R3点亮。
2.2 时钟信号源电路
2.2.1时钟信号源电路及其工作原理或功能说明
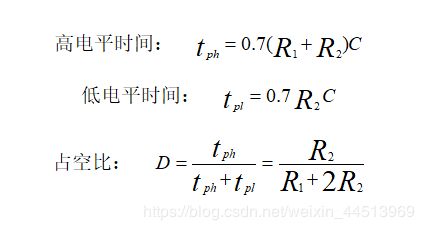
由于汽车灯是地点亮是给人地不同地信息及该车将要发生地动作,所以汽车地灯在闪烁地时候不能超过一定地频率但是频率也不能太小,所以我们在设计地时候是采用地555定时器设计地一个脉冲产生源,占空比约为50%,它产生地频率f约为2HZ。然后通过计数器就能控制汽车灯在循环点亮地时候时间间隔约为0.5S,这样就能让人很清楚地明白该汽车地动作以采取相应地动作,从而避免交通事故地发生。
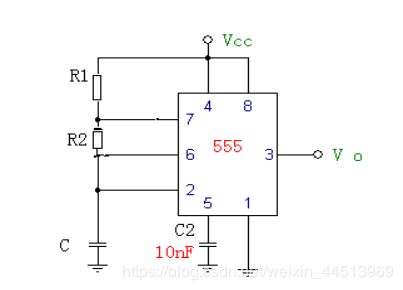
2.2.2 时钟信号源电路元件的选取与计算
选用555产生脉冲信号,就是因为其简单方便,且汽车上没有交流信号源,则必须用555产生脉冲信号 。
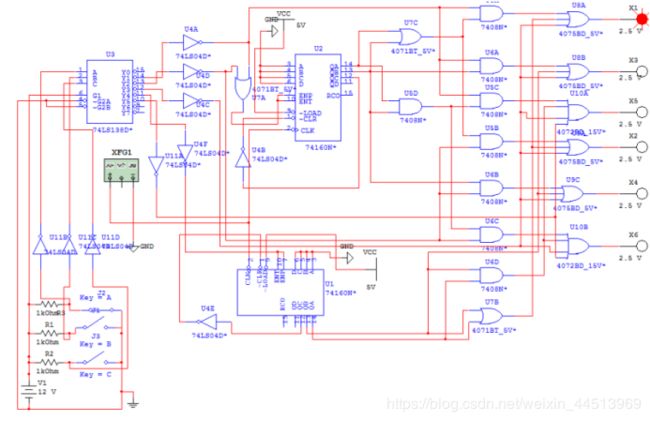
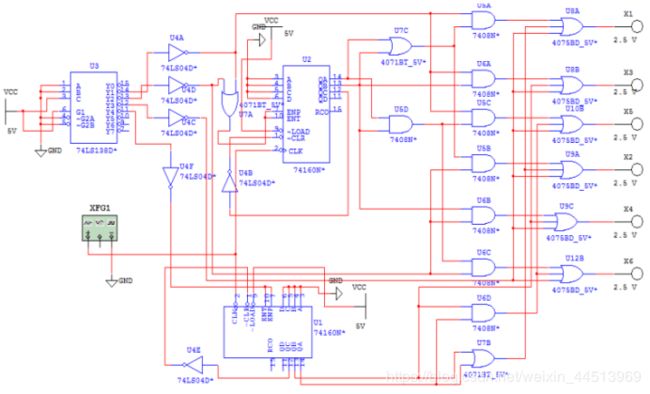
第三部分 整机电路
3.1整机电路图
3.2元件清单
译码电路74138
记数电路74160
脉冲产生电路555
第四部分 性能测量
4.1实验条件(仿真调试和试验箱)
(1)验证信号的产生是否正确,按总电路图连线,检查无误后运行,用示波器来查看555产生波形。
(2)设置555的脉冲时间
(3)设置74160单元
4.2 电路调试
4.2.1 测试使用的仪器
由于电脑只有Multisim14,后期仿真由Multisim14完成。
4.2.2 各模块功能指标测试步骤及测量数据
(1)左转弯功能测试
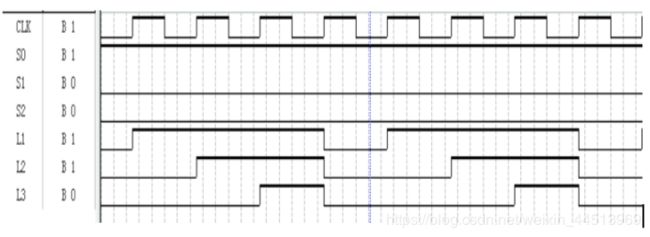
(2)左右转弯功能测试
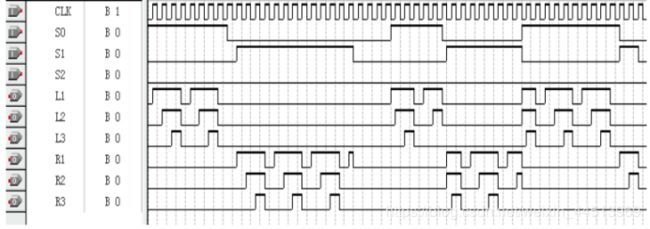
波形分析:当S2 S1 S0=0的时候,L3L2 L1变化顺序为:000->001->011->111->000,R3 R2R1=000由于输出为高电平时灯亮,所以尾灯地点亮方式为:L1→L1L2→L1L2L3→全灭→L1……R3 R2R1恒为熄灭;S2 S1 S0 =010的时候,R3 R2R1变化顺序为:000->001->011->111->000,L1L2L3=000由于输出为高电平时灯亮,所以尾灯地点亮方式为:R1→R1 R2→R1 R2 R3→全灭→R1……L1L2L3恒为熄灭。
S2 S1 S0 =000地时候,R3 R2R1,L1L2L3恒为000,所以所有灯熄灭。经过分析与实际相符合,所以仿真正确。
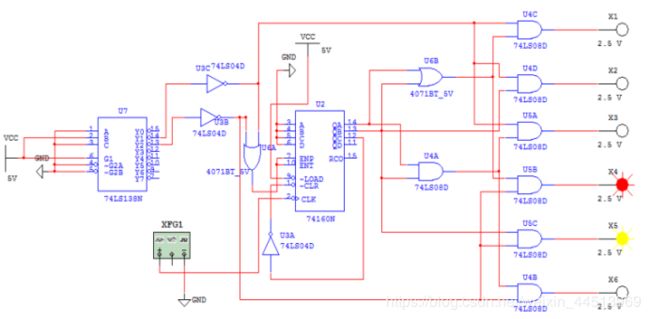
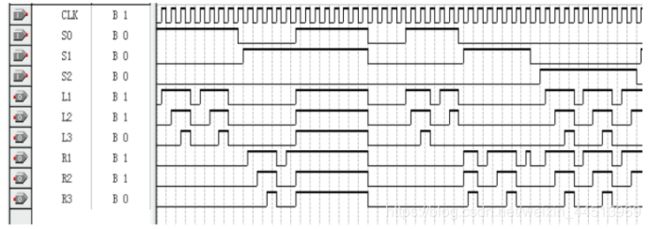
(3)左右转弯刹车和倒车功能测试
4.2.3 故障分析及处理
(1)灯亮灭间隔时间太短
设置555定时器的频率,一般为100Hz。
(2)静态调试
通过静态测试模拟电路的静态工作点,数字电路的各输入端和输出端的高低电平值及逻辑关系等,可以及时发现已经损坏的元器件,判断电路工作情况,并及时调整电路参数,使电路工作状态符合设计要求。
4.3 电路实现的功能和系统使用说明
本次设计就是对汽车尾灯转向时的自动控制。为了演示整个控制过程,用6个发光二极管模拟6个转向灯的亮灭,即汽车左转弯时,左面的3个转向灯由全亮到依次熄灭再到全灭,右面的3个转向灯与之相反。在分析汽车尾灯的设计原理后,采用了逻辑电路(时序逻辑电路)及逻辑元件(555定时器、74160计数器和一些逻辑门等),用逻辑电位“0”和“1”控制尾灯的亮灭,并用Multisim14软件仿真模拟汽车尾灯的控制电路,获得实验结果及部分波形图。
第五部分 课程设计总结
设计尾灯控制电路方案繁多,但在最终决定设计方案时,比较了诸多方案的优劣简易程度,并对其进行了分析,比如在学习中并没有学到振荡器,因此在网上寻找了很多学习资料希望尽可能学会555振荡器,也对数电里的基本时序电路和组合逻辑电路的知识进行了复习与深入理解,进一步增进了对一些常见逻辑器件的了解。
本次设计中的不足:由于在行车地时候都是用开关控制地,所以每一个开关应该有一个消除机械振动地装置,可以利用基本RS触发器来实现。在设计中可以再多用一个74160来做,从而简化电路图。所以如果在时间允许地条件下可以对这一系列地不足进行解决,从而是整个系统更加可靠。1now
汽车尾灯是控制汽车转向的重要部分,它关乎着司机的生命安全和交通系统的正常运行,所以这项设计在生活中有着比较广泛的应用。我首先从汽车尾灯的原理入手,确定了本次设计应该使用时序逻辑电路,然后把汽车尾灯的亮灭状态转化成逻辑状态,分析应该获得的波形,在查找资料的时候查找到了74160计数器和逻辑门的连接,最后经过两天集中的学习和仿真运行,方案成功,但连线较为复杂。最后,在方案改进上我想到了D触发器的连接,通过状态方程和逻辑状态分析,并把逻辑门运用进去,方案也获得成功,但需要两个开关,控制系统较为麻烦,而且分析过程时间较长,方案设计较为困难。
在本次课程设计中,在解决原理上的问题和遇到不理解的问题时,更多的是自己独立思考与自我学习;在调试实物的过程中,遇到了问题然后积极与同学相互探讨解决。
最后,通过本次课程设计不仅巩固了以前数电所学过的知识,而且学到了很多在书本上所没有学到过的知识。通过这次课程设计使我更加懂得了理论与实际的重要性,只有理论知识是不够的,只有把所学的理论知识与实践相结合起来,从理论中得出结论,从而提高自己的实际动手能力和独立思考的能力。过程中,我还感受到了自己劳动自己创造的的成果。所有的方面都需要考虑,系统的每一个细节都需要去认真钻研,稍微有一点差错就得不到想要的结果,这些都培养了我对待科学的各种精神:严谨、认真、创新,这些都是以后学习生活中需要的东西。