MoveIt! Tutorials, MoveIt! 教程——demo
MoveIt! Tutorials,gihub地址:https://github.com/ros-planning/moveit_tutorials/blob/kinetic-devel/index.rst
- Beginner
- MoveIt RViz Plugin Tutorial
- Move Group Interface Tutorial
- Demo的解释
Beginner
MoveIt! RViz Plugin Tutorial
ROS Visualizer (RViz)
下载pr2_moveit_config包,然后编译
git clone https://github.com/davetcoleman/pr2_moveit_config.git启动demo文件配置插件
roslaunch pr2_moveit_config demo.launch启动时发现没有pr2_description包,然后下载安装
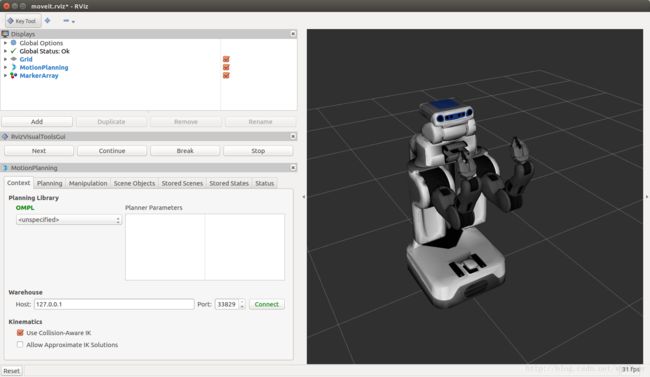
sudo apt-get install ros-kinetic-pr2-description可以打开rviz,
demo.launch里的内容为(好像是自动生成的):
<launch>
<arg name="db" default="false" />
<arg name="db_path" default="$(find pr2_moveit_config)/default_warehouse_mongo_db" />
<arg name="debug" default="false" />
<include file="$(find pr2_moveit_config)/launch/planning_context.launch">
<arg name="load_robot_description" value="true"/>
include>
<node pkg="tf" type="static_transform_publisher" name="virtual_joint_broadcaster_0" args="0 0 0 0 0 0 odom_combined base_footprint 100" />
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">
<param name="/use_gui" value="false"/>
<rosparam param="/source_list">[/move_group/fake_controller_joint_states]rosparam>
node>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" respawn="true" output="screen" />
<include file="$(find pr2_moveit_config)/launch/move_group.launch">
<arg name="allow_trajectory_execution" value="true"/>
<arg name="fake_execution" value="true"/>
<arg name="info" value="true"/>
<arg name="debug" value="$(arg debug)"/>
include>
<include file="$(find pr2_moveit_config)/launch/moveit_rviz.launch">
<arg name="config" value="true"/>
<arg name="debug" value="$(arg debug)"/>
include>
<include file="$(find pr2_moveit_config)/launch/default_warehouse_db.launch" if="$(arg db)">
<arg name="moveit_warehouse_database_path" value="$(arg db_path)"/>
include>
launch>
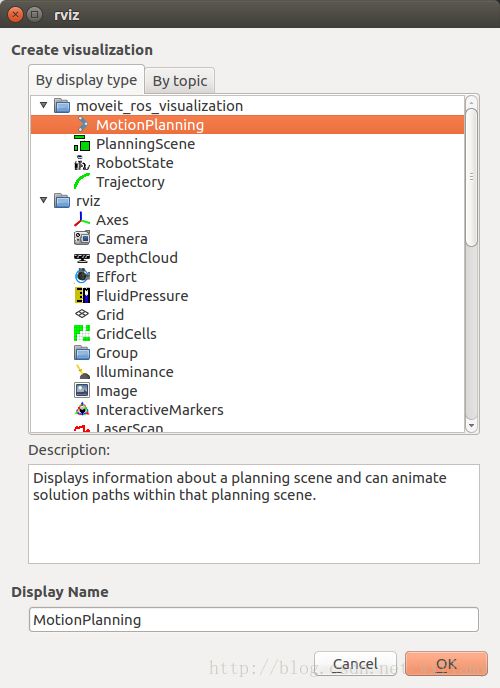
第一次打开需要添加Motion Planning插件,
在“Displays” 子窗口下的“Global Options” 标签中选择固定坐标系为odom_combined,
Planning Scene Topic设为“planning_scene”。
在Planning Request中,修改Planning Group为“right_arm”.
设置Trajectory Topic为“/move_group/display_planned_path”.
Interactive Marker Size设成0.2~0.5,总之不要是零。
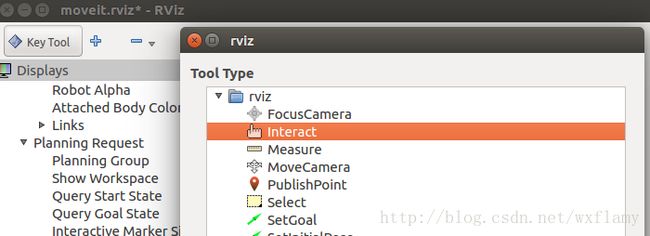
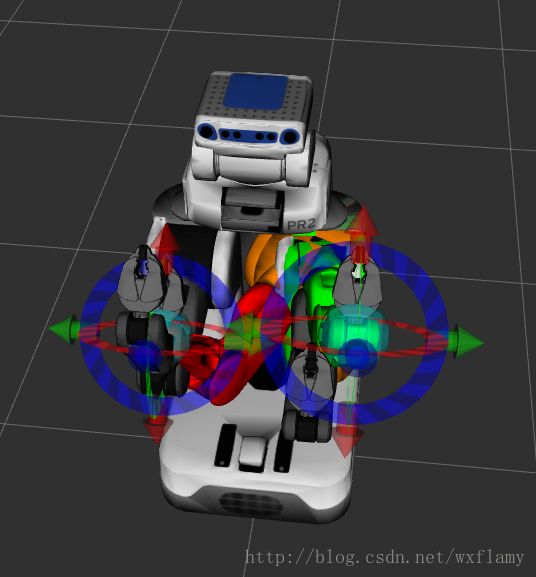
下面开始交互
如下图添加interact工具。可以看到,绿色手臂对应的是起始位姿,黄色手臂对应的是目标位姿。
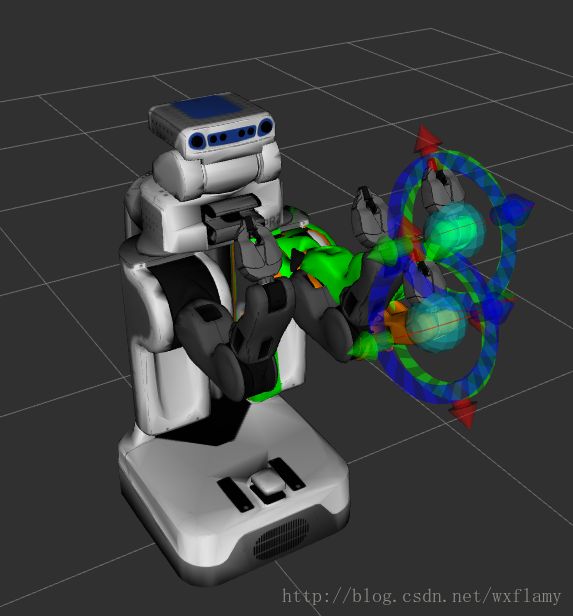
将目标点移动到另一个手臂附近时会发生碰撞,碰撞部位为红色。此时进行规划会失败。
在面板中打开“MotionPlanning - Slider”可以观察plan的每一步

Move Group Interface Tutorial
MoveIt!的用户接口是MoveGroup类。它提供了用户经常使用的各种函数,包括设置关节或者目标位置、建立运动规划、移动机器人和增加障碍物。这一接口通过ROS话题(topics)、服务(service)和动作(action)等进行通信。
据说有个YouTube的视频,本来想以后给传到YouKu上,但其实就是下面这样
建立工作空间
rosdep update
sudo apt-get update
sudo apt-get dist-upgrade
sudo apt-get install python-wstool python-catkin-tools clang-format-3.8在/src下运行
wstool init .
wstool merge https://raw.githubusercontent.com/ros-planning/moveit/kinetic-devel/moveit.rosinstall
wstool update
rosdep install -y --from-paths . --ignore-src --rosdistro kinetic
cd ..
catkin config --extend /opt/ros/kinetic --cmake-args -DCMAKE_BUILD_TYPE=Release
catkin_make下载源码
git clone https://github.com/ros-planning/moveit_tutorials.git
git clone https://github.com/PR2/pr2_common.git -b kinetic-devel
git clone https://github.com/davetcoleman/pr2_moveit_config.git安装相关依赖,然后编译
rosdep install --from-paths . --ignore-src --rosdistro kinetic
cd ~/ws_moveit
catkin config --extend /opt/ros/kinetic --cmake-args -DCMAKE_BUILD_TYPE=Release
catkin_make启动rviz
roslaunch pr2_moveit_config demo.launch在一个新的终端里启动demo
roslaunch moveit_tutorials move_group_interface_tutorial.launch启动后的页面是这个样子的

单机Next按钮或者按N,可以看到下一步的演示。
1. The robot moves its right arm to the pose goal to its right front.
2. The robot moves its right arm to the joint goal at its right side.
3. The robot moves its right arm back to a new pose goal while maintaining the end-effector level.
4. The robot moves its right arm along the desired cartesian path (a triangle up+forward, left, down+back).
5. A box object is added into the environment to the right of the right arm. The robot moves its right arm to the pose goal, avoiding collision with the box.
6. The object is attached to the wrist (its color will change to purple/orange/green).
The object is detached from the wrist (its color will change back to green).
The object is removed from the environment.
7. The robot moves both arms to two different pose goals at the same time.
Demo的解释
刚才的启动文件在这个路径下pr2_tutorials/planning,其中的文件内容为
<launch>
<node
name="move_group_interface_tutorial"
pkg="moveit_tutorials"
type="move_group_interface_tutorial"
respawn="false" //复位属性,如果为真的话,当节点停止的时候,roslaunch会重新启动该节点。
output="screen"> //将标准输出显示在屏幕上而不是记录到日志文档。
node>
launch>可以看到它启动的是一个move_group_interface_tutorial类型的节点。
/* Author: Sachin Chitta, Dave Coleman */
#include 