Ubuntu18.04下利用Gazebo搭建赛道完成ROS机器人定位导航仿真【智能车】
一、安装配置运行的环境
| Ubuntu 18.04 | Ros Melodic | Gazebo 9.0.0 |
|---|
二、创建工作区域,下载源码包
- 先创建ros的工作区域racecar_ws
mkdir -p ~/racecar_ws/src
![]()
- 并转换到工作区域目录,
cd ~/racecar_ws/src
![]()
- 把当前目录初始化为一个ROS工作空间
catkin_init_workspace

- 开始下载Gazebo搭建赛道功能包racecar(这里使用的别人github上开源出来的代码)
git clone https://github.com/xmy0916/racecar.git
下载完成后racecar功能包是这样的

三、安装本次运行需要的控件
(控件的安装是防止后面运行不正确,这里一步步安装就好。)
sudo apt-get install ros-melodic-driver-base
sudo apt-get install ros--melodic-gazebo-ros-control
sudo apt-get install ros--melodic-effort-controllers
sudo apt-get install ros--melodic-joint-state-controller
sudo apt-get install ros-melodic-ackermann-msgs
sudo apt-get install ros-melodic-global-planner
sudo apt-get install ros-melodic-teb-local-planner
四、racecar功能包编译
cd ~/racecar_ws
catkin_make

编译成功如下图所示:
(出现100%,恭喜你很幸运,如果出现问题,本文后面有解决办法!)

五、启动仿真编译
- 设置环境变量,程序注册
echo "source ~/racecar_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc

- 启动gazebo,运行打开小车模型
roslaunch racecar_gazebo racecar.launch
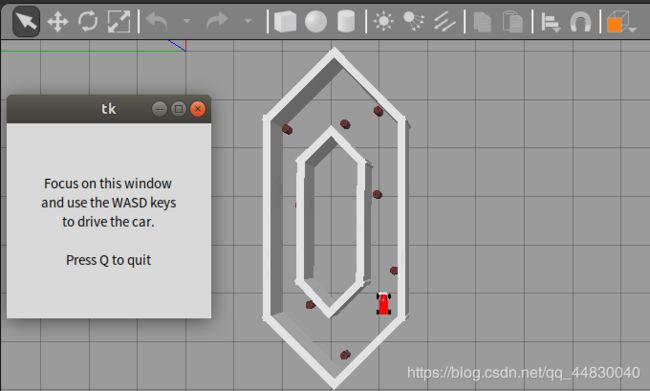
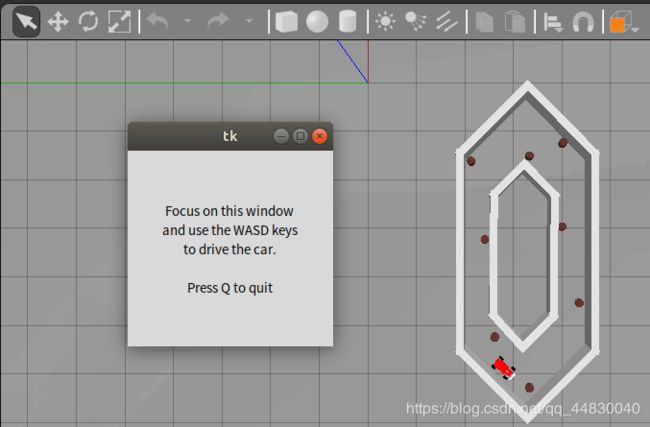
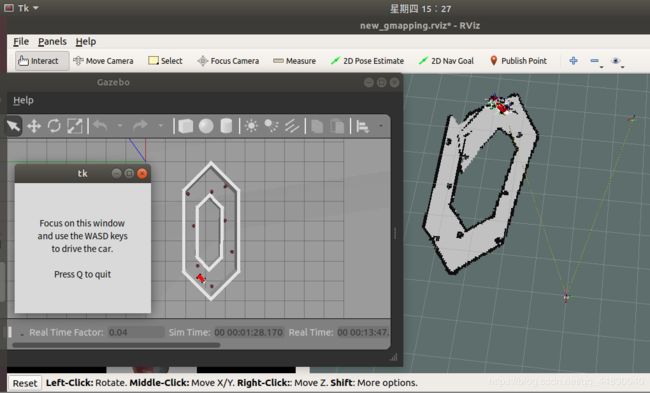
- 运行结果显示,系统将会打开一个tk的控制界面小窗,控制小车的移动,如图
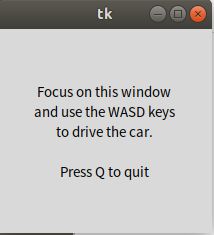
- 可以看到一个红色小车的模型

六、手动搭建小车的赛道
- 在终端打开
Gazebo,点击Edit->Build Editor,创建模型,保存该模型

- 完成后关闭gazebo,找到对应Location文件夹,看到自己创建赛道模型
- 运行小车模型,导入刚自己创建的赛道模型框架,保存为world文件

- 拖入刚创建的地图到恰当位置

- 为保证模型顺利加载,请提前将模型文件库下载并放置到
~/.gazebo/models,下载模型文件库gazebo_models的方法 - 方法一:打开终端用命令下载(我发现比较慢… …)
git clone https://bitbucket.org/osrf/gazebo_models/downloads/
- 方法二:先用浏览器下载,再放入相应路径里面
网址(https://github.com/osrf/gazebo_models),点击gazebo_models,进去之后选择下载就好了
- 将模型文件库下载并放置到
~/.gazebo/models应该是这样的
- 继续完善上面的赛道,添加障碍物

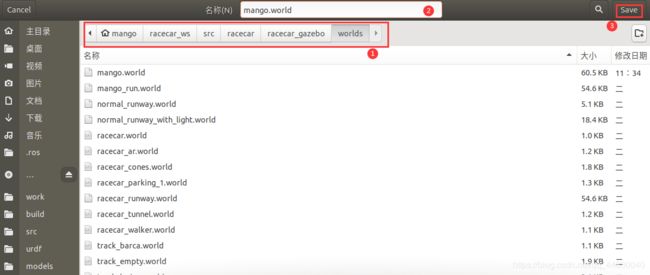
- 保存world文件到下载功能包中的racecar_gazebo里面worlds文件夹,选择File->Save World AS,保存好后关闭gazebo,如图
- 创建launch文件,配置赛道参数
先进入路径:~/racecar_ws/src/racecar/racecar_gazebo/launch,并创建mango.launch文件
cd ~/racecar_ws/src/racecar/racecar_gazebo/launch
sudo gedit mango.launch
在里面加入如下代码:
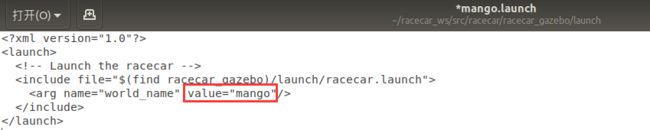
然后保存关闭。
七、运行自己创建的地图
- 运行gazebo自己的地图
source ./devel/setup.bash
roslaunch racecar_gazebo mango.launch
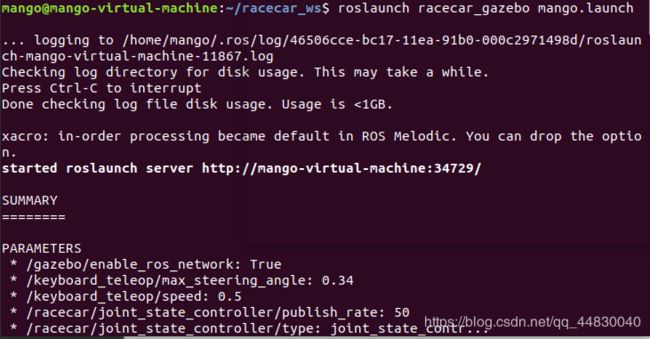
- 会看见如下效果

- 小车的详细运动情况如下表所示:
| WASD控制 | 运动情况 |
|---|---|
| W | 前进 |
| S | 后退 |
| D | 轮子右转,小车不动 |
| A | 轮子左转,小车不动 |
| A + W | 小车左向前移 |
| A + S | 小车右向后移 |
| D + W | 小车右向前移 |
| D + S | 小车左向后移 |
- 如下面的GIF动图是我的小车运动的情况,有点慢…,但是还是可以看见它的移动轨迹的。

- 这里由于mp4文件无法上传到博客,所以我用到了:
虚拟机 Ubuntu 下用 【ffmpeg】 将视频 mp4 转换为 gif 动图
八、通过自己建立的赛道进行gmapping建图
上面运行的终端不关闭,继续gmapping建图运行
roslaunch racecar_gazebo slam_gmapping.launch
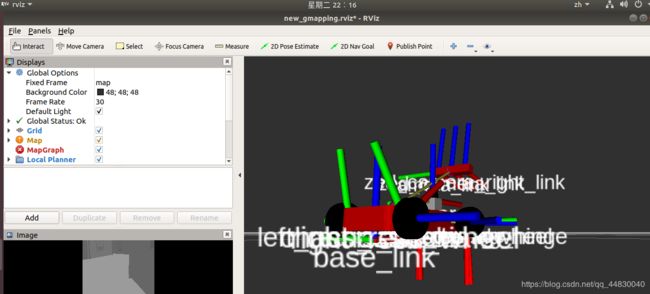
 (rviz中放大模型,感觉什么都可以看清楚了!)
(rviz中放大模型,感觉什么都可以看清楚了!)
- 这里可以看见小车的起点
- 运行一圈后小车到达的终点
- 跑完整圈,Rviz中的轨迹以及小车的视角显示如下图所示
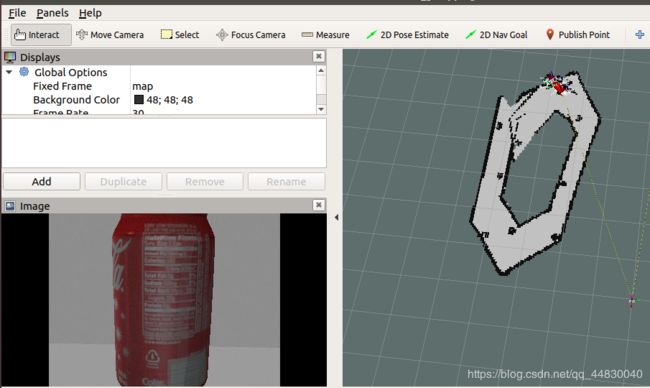
- 建图完成后详细全图情况
- 我把控制小车转完整圈的整个运行做成了GIF动图上传了上来,可以看见,它运行的很慢,大约8分钟,大家耐心等待!
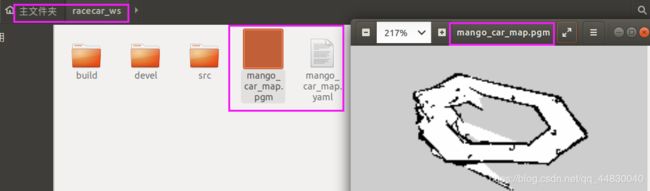
- 刚才上面的各个终端都不要关闭,继续新建终端,保存刚才gmapping创建的地图
cd ~/racecar_ws
rosrun map_server map_saver -f mango_car_map

- 保存成功的地图详细情况如图所示
九、小车自主定位导航
- 打开终端,执行如下命令
cd ~/racecar_ws/src/racecar/racecar_gazebo/launch
sudo gedit mango_auto.launch
- 在mango_auto.launch编辑如下代码
- 保存退出!
- 这里需要注意的两个地方,改为自己创建的world文件名和刚才保存地图的yaml文件路径和其名称。

1.手工导航,运行自己创建的赛道
cd ~/racecar_ws
source ./devel/setup.bash
roslaunch racecar_gazebo mango_auto.launch

2.继续打开另一个终端,启动rviz
roslaunch racecar_gazebo racecar_rviz.launch

- 导航进行时,可以看见效果如下图
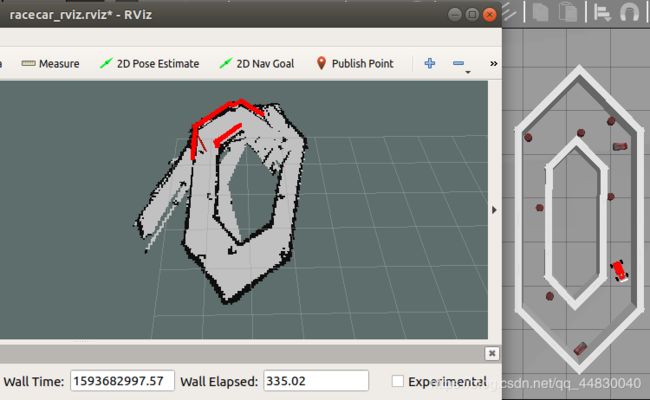
- 此时用2D Nav Goal发布目标来设计小车行车轨迹(这个不好控制,要小心!)

- 继续再打开另一个终端,启动path_pursuit.py脚本文件
rosrun racecar_gazebo path_pursuit.py

- 继续导航的下效果图

- 到达终点,Goal Resched!

- 事实证明,只要你在仿真过程中各方面控制的好,小车是可以实现自动导航驾驶的。自动规划路线并控制小车到达了预定的目标,这和现实中的开车是一样的,这里是人为的用键盘“WSAD”控制小车移动的方向,小车被卡住或者遇到障碍物有时会翻车。
- 还有就是小车自动导航驾驶的时候注意在绘制赛道的时候起点和终点的选择,没控制好小车的运行轨迹小车如果撞墙就会被认为到达了终点。
- 由于我经验不足,赛道建的太窄了,所以用了可乐罐充当障碍物,大家在实验搭建过程中记得把赛道的距离取好,用专门的跑道障碍物这样更加接近真实的环境。
十、遇见的问题及解决办法
(根据上面步骤做,不一定会遇见这些问题。)
-
问题一
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by “driver_base” with
any of the following names:driver_baseConfig.cmake
driver_base-config.cmake
Add the installation prefix of “driver_base” to CMAKE_PREFIX_PATH or set
“driver_base_DIR” to a directory containing one of the above files. If
“driver_base” provides a separate development package or SDK, be sure it
has been installed.
Call Stack (most recent call first):
racecar/system/hokuyo_node/CMakeLists.txt:13 (find_package)
– Configuring incomplete, errors occurred!
See also “/home/mango/racecar_ws/build/CMakeFiles/CMakeOutput.log”.
See also “/home/mango/racecar_ws/build/CMakeFiles/CMakeError.log”.
Invoking “cmake” failed
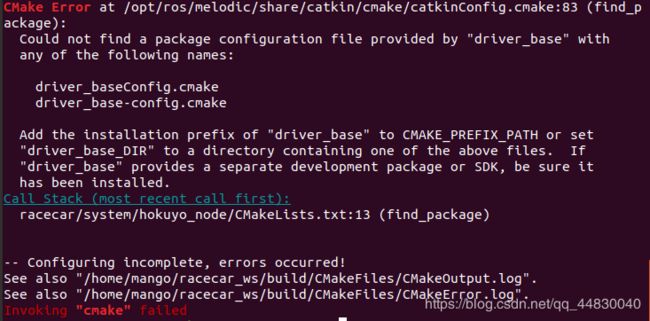
解决办法
原因是确少driver_base功能包,安上它就好了
sudo apt-get install ros-melodic-driver-base

然后执行catkin_make编译通过
-
问题二
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by “OpenCV” with any
of the following names:OpenCVConfig.cmake
opencv-config.cmake
Add the installation prefix of “OpenCV” to CMAKE_PREFIX_PATH or set
“OpenCV_DIR” to a directory containing one of the above files. If “OpenCV”
provides a separate development package or SDK, be sure it has been
installed.
Call Stack (most recent call first):
racecar/racecar_gazebo/CMakeLists.txt:8 (find_package)
– Configuring incomplete, errors occurred!
See also “/home/mango/racecar_ws/build/CMakeFiles/CMakeOutput.log”.
See also “/home/mango/racecar_ws/build/CMakeFiles/CMakeError.log”.
Invoking “cmake” failed

解决办法
首先使用指令搜索OpenCVConfig.cmake文件的路径:

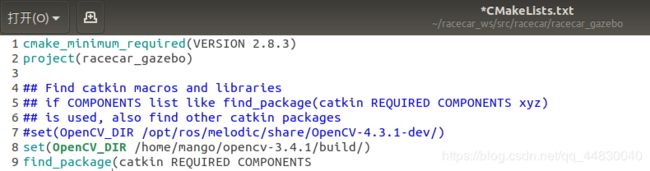
进入相关目录编辑catkinConfig.cmake文件
cd /opt/ros/melodic/share/catkin/cmake
sudo gedit catkinConfig.cmake
![]()
在find _package前面添加如下内容
set(OpenCV_DIR /usr/share/OpenCV)

好像这个路径下添加也可以解决
- 问题三
/home/mango/racecar_ws/src/racecar/racecar_gazebo/src/findLine.cpp:7:10: fatal e
rror: ackermann_msgs/AckermannDrive.h: 没有那个文件或目录
#include “ackermann_msgs/AckermannDrive.h”
^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
compilation terminated.
racecar/racecar_gazebo/CMakeFiles/findLine.dir/build.make:62: recipe for target
‘racecar/racecar_gazebo/CMakeFiles/findLine.dir/src/findLine.cpp.o’ failed
make[2]: *** [racecar/racecar_gazebo/CMakeFiles/findLine.dir/src/findLine.cpp.o]
Error 1
CMakeFiles/Makefile2:4559: recipe for target ‘racecar/racecar_gazebo/CMakeFiles/
findLine.dir/all’ failed
make[1]: *** [racecar/racecar_gazebo/CMakeFiles/findLine.dir/all] Error 2
Makefile:140: recipe for target ‘all’ failed
make: *** [all] Error 2
Invoking “make -j1 -l1” failed

解决办法
这主要是缺少相关的包导致的,安装就可以了
sudo apt-get install ros-melodic-ackermann-msgs

-
问题四
[gazebo_gui-3] process has died [pid 11595, exit code 137, cmd /opt/ros/melodic/lib/gazebo_ros/gzclient __name:=gazebo_gui __log:=/home/mango/.ros/log/465e242c-bad7-11ea-800b-000c2971498d/gazebo_gui-3.log].
log file: /home/mango/.ros/log/465e242c-bad7-11ea-800b-000c2971498d/gazebo_gui-3*.log

-
问题五
[gazebo-2] process has died [pid 12735, exit code 255, cmd /opt/ros/melodic/lib/gazebo_ros/gzserver -e ode /home/mango/racecar_ws/src/racecar/racecar_gazebo/worlds/racecar_runway.world __name:=gazebo __log:=/home/mango/.ros/log/1d633998-bad9-11ea-800b-000c2971498d/gazebo-2.log].
log file: /home/mango/.ros/log/1d633998-bad9-11ea-800b-000c2971498d/gazebo-2*.log
(这两个问题可以重启虚拟机试试。) -
问题六
ERROR: cannot launch node of type [gmapping/slam_gmapping]: gmapping
ROS path [0]=/opt/ros/melodic/share/ros
ROS path [1]=/home/mango/racecar_ws/src
ROS path [2]=/home/mango/catkin_ws/src
ROS path [3]=/opt/ros/melodic/share
解决办法
也是缺少相关包导致的,执行如下命令安装
sudo apt-get install ros-melodic-gmapping

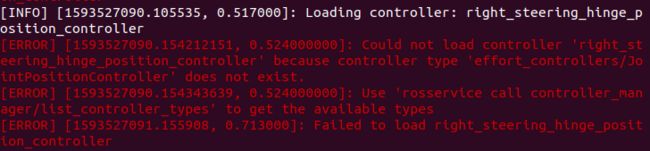
- 问题七
[ERROR] [1593527090.154212151, 0.524000000]: Could not load controller ‘right_steering_hinge_position_controller’ because controller type ‘effort_controllers/JointPositionController’ does not exist.
[ERROR] [1593527090.154343639, 0.524000000]: Use ‘rosservice call controller_manager/list_controller_types’ to get the available types
[ERROR] [1593527091.155908, 0.713000]: Failed to load right_steering_hinge_position_controller
- 问题八
[rospack] Error: package ‘map_server’ not found
解决办法sudo apt-get install ros-melodic-map-server

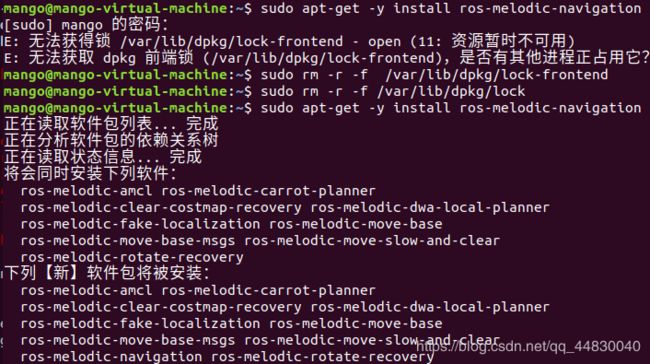
- 问题九
ERROR: cannot launch node of type [move_base/move_base]: move_base
ROS path [0]=/opt/ros/melodic/share/ros
ROS path [1]=/home/mango/racecar_ws/src
ROS path [2]=/opt/ros/melodic/share
[ERROR] [1593684906.410814958]: Map_server could not open /home/mango/racecar_ws/src/racecar/racecar_gazebo/map/mango_car_map.yaml.
[map_server-20] process has died [pid 2352, exit code 255, cmd /opt/ros/melodic/lib/map_server/map_server /home/mango/racecar_ws/src/racecar/racecar_gazebo/map/mango_car_map.yaml __name:=map_server __log:=/home/mango/.ros/log/e38cc340-bc4c-11ea-b168-000c2971498d/map_server-20.log].
log file: /home/mango/.ros/log/e38cc340-bc4c-11ea-b168-000c2971498d/map_server-20*.log

解决办法sudo apt-get -y install ros-melodic-navigation
详细过程如图所示
本次ROS机器人定位导航仿真结束了,作为物联网小白,肯定有很多不足,希望各位大佬指正,谢谢。