Opencv4 vs2017 实现kcf ( opencv_contrib )
先放上Learn Opencv上关于追踪算法的介绍以及C++和python的代码实现
https://www.learnopencv.com/object-tracking-using-opencv-cpp-python/
#include
#include
#include
using namespace cv;
using namespace std;
// Convert to string
#define SSTR( x ) static_cast< std::ostringstream & >( \
( std::ostringstream() << std::dec << x ) ).str()
int main(int argc, char **argv)
{
// List of tracker types in OpenCV 3.4.1
string trackerTypes[8] = {"BOOSTING", "MIL", "KCF", "TLD","MEDIANFLOW", "GOTURN", "MOSSE", "CSRT"};
// vector trackerTypes(types, std::end(types));
// Create a tracker
string trackerType = trackerTypes[2];
Ptr tracker;
#if (CV_MINOR_VERSION < 3)
{
tracker = Tracker::create(trackerType);
}
#else
{
if (trackerType == "BOOSTING")
tracker = TrackerBoosting::create();
if (trackerType == "MIL")
tracker = TrackerMIL::create();
if (trackerType == "KCF")
tracker = TrackerKCF::create();
if (trackerType == "TLD")
tracker = TrackerTLD::create();
if (trackerType == "MEDIANFLOW")
tracker = TrackerMedianFlow::create();
if (trackerType == "GOTURN")
tracker = TrackerGOTURN::create();
if (trackerType == "MOSSE")
tracker = TrackerMOSSE::create();
if (trackerType == "CSRT")
tracker = TrackerCSRT::create();
}
#endif
// Read video
VideoCapture video("videos/chaplin.mp4");
// Exit if video is not opened
if(!video.isOpened())
{
cout << "Could not read video file" << endl;
return 1;
}
// Read first frame
Mat frame;
bool ok = video.read(frame);
// Define initial bounding box
Rect2d bbox(287, 23, 86, 320);
// Uncomment the line below to select a different bounding box
// bbox = selectROI(frame, false);
// Display bounding box.
rectangle(frame, bbox, Scalar( 255, 0, 0 ), 2, 1 );
imshow("Tracking", frame);
tracker->init(frame, bbox);
while(video.read(frame))
{
// Start timer
double timer = (double)getTickCount();
// Update the tracking result
bool ok = tracker->update(frame, bbox);
// Calculate Frames per second (FPS)
float fps = getTickFrequency() / ((double)getTickCount() - timer);
if (ok)
{
// Tracking success : Draw the tracked object
rectangle(frame, bbox, Scalar( 255, 0, 0 ), 2, 1 );
}
else
{
// Tracking failure detected.
putText(frame, "Tracking failure detected", Point(100,80), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(0,0,255),2);
}
// Display tracker type on frame
putText(frame, trackerType + " Tracker", Point(100,20), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(50,170,50),2);
// Display FPS on frame
putText(frame, "FPS : " + SSTR(int(fps)), Point(100,50), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(50,170,50), 2);
// Display frame.
imshow("Tracking", frame);
// Exit if ESC pressed.
int k = waitKey(1);
if(k == 27)
{
break;
}
}
}
这里我因为需要,使用的是C++,, kcf。
问题:
在配置完成opencv环境之后,我直接将代码粘了过来,然而总是找不到
tracking.hpp 我尝试使用了video目录下面的tracking.hpp头文件,并不能使用。
看了许多博客之后,最后找到了解决方法:需要给opencv配置contrib 扩展。下面是具体的步骤:
cmake的下载以及安装
下载链接: https://cmake.org/download/
根据需要下载,我下载的是:
![]()
next,,。
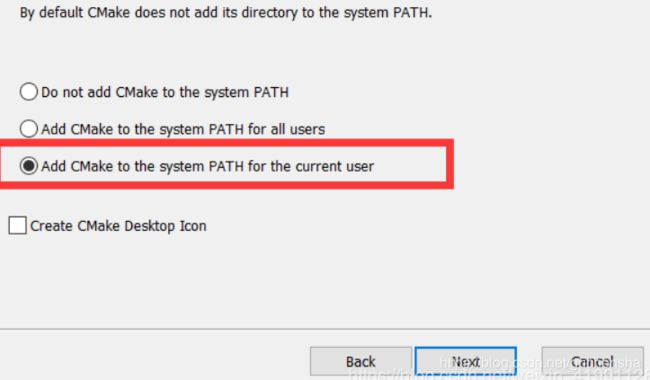
create icon选上也可
contrib 的下载
下载链接: https://github.com/opencv/opencv_contrib/releases.
我的opencv 版本4.00
于是我下载了

下载完成之后解压到任意路径即可。
利用Cmake进行编译
打开安装好的cmake
如下图,这里需要选择两个路径。第一个source路径是安装好了的opencv中的source文件夹的路径。第二个路径是我们自己设置的一个文件夹的路径(这个路径之后需要用来配置环境)
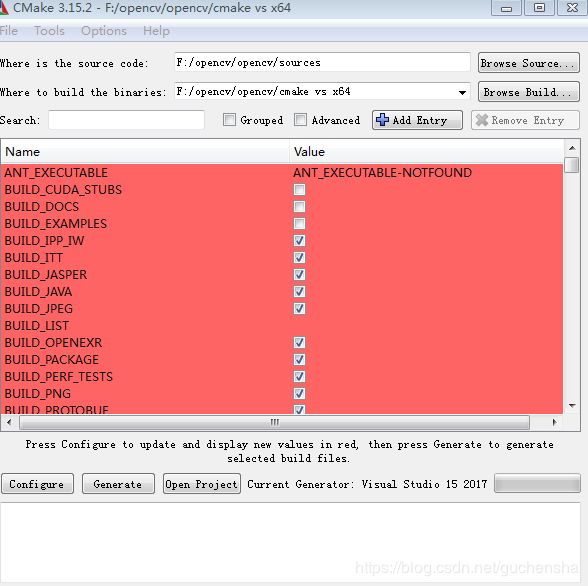
点击configure 并选择相应的VS版本,上图中我已经选择好了 :VS 15 2017 注意选择64位还是32位。
configure一段时间之后,会显示“Configure Done” 。接下来
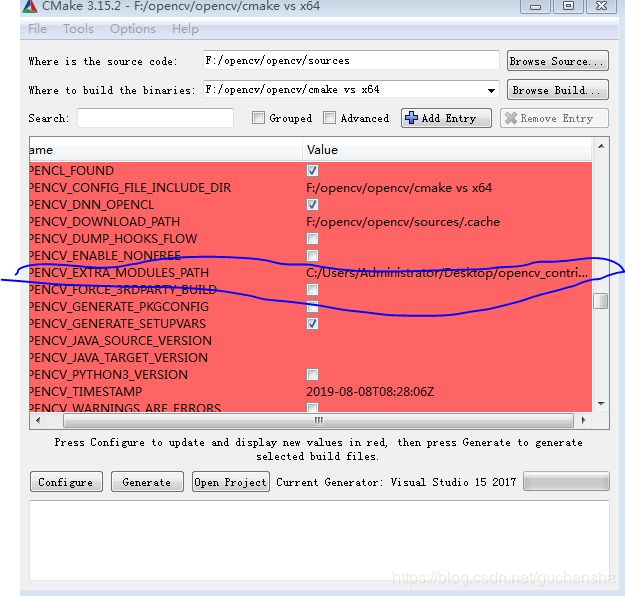
找到上图中蓝色圈起来的那一项,,路径选择自己解压好了的opencv_contrib下的modules目录,点击generate
genenrate一段时间之后会显示“Generating Done”。
VS编译
第一步
利用VS打开自定义的文件夹,之后打开“Opencv.sln”
![]()
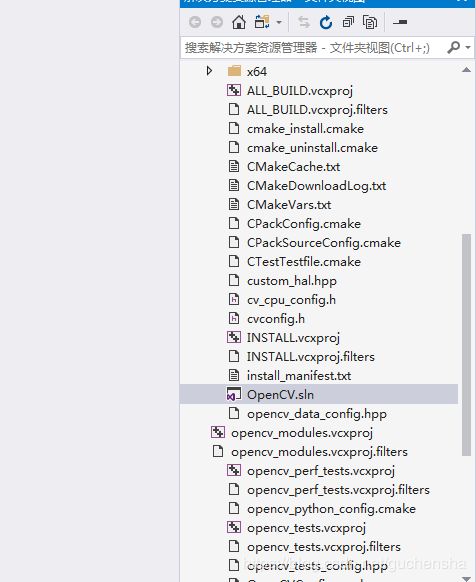
第二步
点击生成 —重新生成解决方案(该过程需要耗费一定的时间)
我再完成这一步的时候报错了
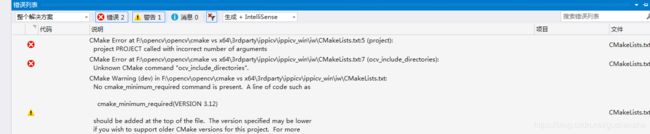
并没有解决错误,不过即便没有处理对最后的结果也没有产生影响。
第三步
解决方案资源管理器—>CMakeTargets—>INSTALL—>仅用于项目—>仅生成INSTALL
第四步
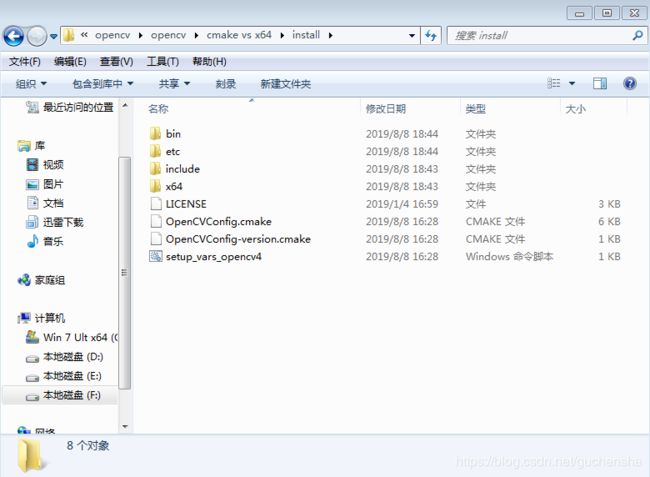
找到自定义文件夹中的install文件夹 进行验证。(会有一点出入)
Opencv_contrib 环境配置
该配置与opencv环境配置完全相同。
分别是:系统变量,VC++目录中的包含目录和库目录,,下面是我添加的目录,使用上一步的install,具体路径具体分析
F:\opencv\opencv\cmake vs x64\install\include\opencv2
F:\opencv\opencv\cmake vs x64\install\include
附加依赖项(注意自己的版本):
opencv_aruco400d.lib
opencv_bgsegm400d.lib
opencv_bioinspired400d.lib
opencv_calib3d400d.lib
opencv_ccalib400d.lib
opencv_core400d.lib
opencv_datasets400d.lib
opencv_dnn400d.lib
opencv_dnn_objdetect400d.lib
opencv_dpm400d.lib
opencv_face400d.lib
opencv_features2d400d.lib
opencv_flann400d.lib
opencv_fuzzy400d.lib
opencv_gapi400d.lib
opencv_hfs400d.lib
opencv_highgui400d.lib
opencv_imgcodecs400d.lib
opencv_imgproc400d.lib
opencv_img_hash400d.lib
opencv_line_descriptor400d.lib
opencv_ml400d.lib
opencv_objdetect400d.lib
opencv_optflow400d.lib
opencv_phase_unwrapping400d.lib
opencv_photo400d.lib
opencv_plot400d.lib
opencv_reg400d.lib
opencv_rgbd400d.lib
opencv_saliency400d.lib
opencv_shape400d.lib
opencv_stereo400d.lib
opencv_stitching400d.lib
opencv_structured_light400d.lib
opencv_superres400d.lib
opencv_surface_matching400d.lib
opencv_text400d.lib
opencv_tracking400d.lib
opencv_video400d.lib
opencv_videoio400d.lib
opencv_videostab400d.lib
opencv_xfeatures2d400d.lib
opencv_ximgproc400d.lib
opencv_xobjdetect400d.lib
opencv_xphoto400d.lib
此时进行kcf编译
这时tracking.hpp可以被找到,但是会出现新的问题。
tracker 未标明的标识符 这是由于opencv版本更新带来的问题,这时我们在调用opencv自带的 kcf算法的时候需要如下声明:
Ptr tracker = TrackerKCF::create();
KCF代码如下:
#include
#include
#include
#include
#include
#include
using namespace std;
using namespace cv;
int main()
{
Rect2d roi;
Mat frame;
Ptr tracker = TrackerKCF::create();//高版本一般是这样创建KCF的
//string video = "F://crop.avi"; //视频流
VideoCapture cap(0);//启用摄像头
//VideoCapture cap(video);
if (!cap.isOpened())
{
return 0;
}
cout << "press c to leap current Image" << endl;
cout << "press q to slect current Image" << endl;
cout << "press empty key to start track RIO Object" << endl;
cap >> frame;
while (1)
{
char key = waitKey(1);
if (key == 'c') // 按c键跳帧
{
cap >> frame;
}
if (key == 'q') // 按q键退出跳帧
{
break;
}
imshow("first", frame);
}
cv::destroyWindow("first");
roi = selectROI("tracker", frame);
if (roi.width == 0 || roi.height == 0)
return 0;
tracker->init(frame, roi);
// perform the tracking process
printf("Start the tracking process\n");
for (;; )
{
// get frame from the video
cap >> frame;
// stop the program if no more images
if (frame.rows == 0 || frame.cols == 0) {
cv::destroyWindow("tracker");
break;
}
// update the tracking result
tracker->update(frame, roi);
// draw the tracked object
rectangle(frame, roi, Scalar(255, 0, 0), 2, 1);
// show image with the tracked object
imshow("tracker", frame);
if (char(waitKey(1)) == 'q') {
cv::destroyWindow("tracker");
break;
}
}
return 0;
}