单片机STC89C51入门学习笔记--基础实验例程(一)
文章目录
- 前言
- 1. 点亮第一个LED
- 1.1 代码
- 1.2 编译
- 1.3 程序下载
- 1.4 结果展示
- 1.5 常见问题及解决办法
- 2. LED灯闪烁
- 2.1 代码
- 2.2 编译
- 2.3 程序下载
- 2.4 结果展示
- 2.5 常见问题及解决办法
- 3. LED流水灯
- 3.1 代码
- 3.2 编译
- 3.3 程序下载
- 3.4 结果展示
- 3.5 常见问题及解决办法
- 4. 蜂鸣器
- 4.1 代码
- 4.2 编译
- 4.3 程序下载
- 4.4 结果展示
- 4.5 常见问题及解决办法
- 5. 动态数码管显示
- 5.1 代码
- 5.2 编译
- 5.3 程序下载
- 5.4 结果展示
- 5.5 常见问题及解决办法
- 6. 独立按键
- 6.1 代码
- 6.2 编译
- 6.3 程序下载
- 6.4 结果展示
- 6.5 常见问题及解决办法
- 7. 矩阵按键
- 7.1 代码
- 7.2 编译
- 7.3 程序下载
- 7.4 结果展示
- 7.5 常见问题及解决办法
- 8. 单片机IO扩展--74HC595
- 8.1 代码
- 8.2 编译
- 8.3 程序下载
- 8.4 结果展示
- 8.5 常见问题及解决办法
- 9. LED点阵(点亮一个点)
- 9.1 代码
- 9.2 编译
- 9.3 程序下载
- 9.4 结果展示
- 9.5 常见问题及解决办法
- 10. LED点阵(显示数字)
- 10.1 代码
- 10.2 编译
- 10.3 程序下载
- 10.4 结果展示
- 10.5 常见问题及解决办法
- 11. 直流电机
- 11.1 代码
- 11.2 编译
- 11.3 程序下载
- 11.4 结果展示
- 11.5 常见问题及解决办法
- 12. 外部中断0
- 12.1 代码
- 12.2 编译
- 12.3 程序下载
- 12.4 结果展示
- 12.5 常见问题及解决办法
- 13. 定时器0中断
- 13.1 代码
- 13.2 编译
- 13.3 程序下载
- 13.4 结果展示
- 13.5 常见问题及解决办法
- 14. 串口通信
- 14.1 代码
- 14.2 编译
- 14.3 程序下载
- 14.4 结果展示
- 14.5 常见问题及解决办法
- 15. EEPROM-IIC
- 15.1 代码
- 15.2 编译
- 15.3 程序下载
- 15.4 结果展示
- 15.5 常见问题及解决办法
- 16. DS18B20温度传感器
- 16.1 代码
- 16.2 编译
- 16.3 程序下载
- 16.4 结果展示
- 16.5 常见问题及解决办法
- 17. DS1302时钟
- 17.1 代码
- 17.2 编译
- 17.3 程序下载
- 17.4 结果展示
- 17.5 常见问题及解决办法
- 18. AD模数转换
- 18.1 代码
- 18.2 编译
- 18.3 程序下载
- 18.4 结果展示
- 18.5 常见问题及解决办法
- 19. DA数模转换
- 19.1 代码
- 19.2 编译
- 19.3 程序下载
- 19.4 结果展示
- 19.5 常见问题及解决办法
- 20. LCD1602液晶
- 20.1 代码
- 20.2 编译
- 20.3 程序下载
- 20.4 结果展示
- 20.5 常见问题及解决办法
前言
本笔记用于记录STC89C51单片机开发板入门学习,此部分为基础实验例程。开始实验前建议学习《10天学会51单片机-郭天祥》,另外还需要一定的C语言基础。
准备环境:
- 笔记本一台;
- STC89C51开发板一套(我选用的是普中51-单核-A2开发板,入手价格56元,因为便宜买的);
- 串口助手软件STC-ISP(用于程序下,也可用商家自带的程序下载软件);
- KeiluVision5软件(用于程序开发,安装和教程自行百度)。
1. 点亮第一个LED
本条所要实现的功能是:点亮D1发光二极管,即让P2.0管脚输出一个低电平。
1.1 代码
/*********************
点亮第一个LED灯实验
实验现象:下载程序后D1指示灯点亮
日期:2020-04-11
作者:lixs
**********************/
#include 1.2 编译
编译前需要在KeiluVision5软件进行设置:1)options选项;2)output选项;3)勾选create HEX file;4)命名Name of Executable。如下图所示:

设置完成后进行编译。如下图所示:

编译完成后会生成.hex文件。如下图所示:
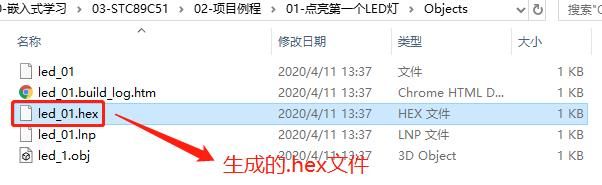
至此编译工作完成。
1.3 程序下载
编译生成.hex文件后,打开STC-ISP软件,将此.hex文件下载到单片机中。
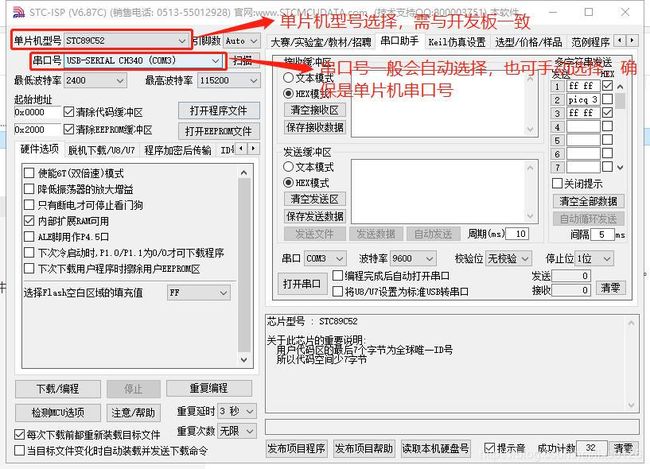
STC-ISP软件设置。如下图所示:
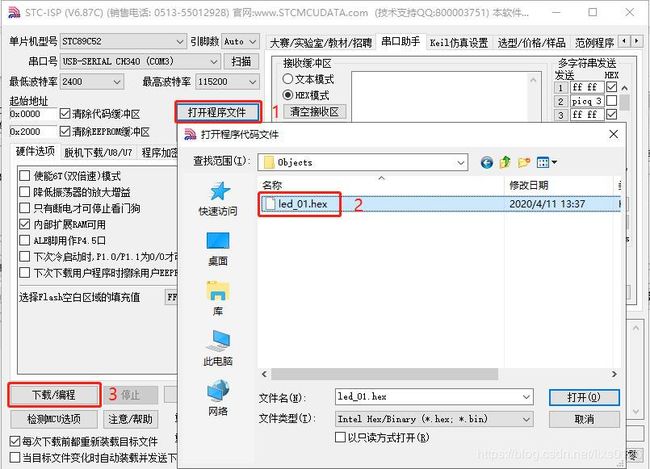
软件设置完成后,开始下载程序:1)点击打开程序文件;2)选择.hex文件;3)点击下载/编程。如下图所示:
点击下载程序后会出现:正在检测目标单片机…,此时检查单片机是否上电。如已上电,请关闭电源,重新上电,即可完成程序下载。如下图所示:

单片机正常连接后,会完成程序下载,STC-ISP软件会提示程序下载结果。如下图所示:

1.4 结果展示

1.5 常见问题及解决办法
无
2. LED灯闪烁
本条所要实现的功能是:让D1发光二极管固定周期闪烁,即让P2.0管脚先输出一个低电平点亮D1,然后固定周期后输出一个高电平熄灭D1。这就需要增加一个延时,我们利用c语言中的循环函数,让CPU不断循环执行即可实现延时功能。
2.1 代码
/*********************
LED灯闪烁实验
实验现象:下载程序后D1指示灯闪烁
日期:2020-04-11
作者:lixs
**********************/
#include 2.2 编译
编译过程同1.2一致。
2.3 程序下载
程序下载过程同1.3一致。
2.4 结果展示
2.5 常见问题及解决办法
问题1:为什么如果将延时函数中的形参x赋值超过65535即LED灯延时间隔即呈现非正常状态?
解决办法:因为x数据类型为unsigned int类型,最大值为65535,因此x会溢出,导致非正常状态出现,x的赋值一定要严格在数据类型的取值范围内,否则不会得到预期结果。
3. LED流水灯
3.1 代码
/*********************
LED流水灯实验
实验现象:下载程序后D1-D8指示灯循环逐个点亮
日期:2020-04-11
作者:lixs
**********************/
#include
//主函数:实现led灯流水效果(采用左移函数实现)
void main()
{
led=~0x01;//0x01取反即为0xFE,也可直接写led=0xFE
delay(50000);//循环50000次,即大约延时500ms
while(1)
{
for(i=0;i<8;i++)//循环8次,即与D1-D8一一对应
{
led=_crol_(led,1);//左移函数,将led的值左移1位,然后将结果赋值到led中
delay(50000);//循环50000次,即大约延时500ms
}
}
}
//延时函数,x=1时,大约延时10us
void delay(uint16 x)
{
while(x--);
}
3.2 编译
编译过程同1.2一致。
3.3 程序下载
程序下载过程同1.3一致。
3.4 结果展示
3.5 常见问题及解决办法
问题1: 为什么LED流水灯点亮的同时,数码管也会跟着流动点亮?
解决办法:经查看开发板原理图得知,此现象是由于硬件电路导致,非程序影响。
由于工作原因,无法保证定期更新实验例程,还请谅解。以下实验例程会不定期更新,欢迎随时光临指导。
4. 蜂鸣器
4.1 代码
/*********************
蜂鸣器发声实验
实验现象:下载程序后蜂鸣器模块发声
日期:2020-04-11
作者:lixs
**********************/
#include 4.2 编译
编译过程同1.2一致。
4.3 程序下载
程序下载过程同1.3一致。
4.4 结果展示
- 待上传视频
4.5 常见问题及解决办法
无
5. 动态数码管显示
5.1 代码
/*********************
动态数码管实验
实验现象:下载程序后动态数码管依次显示数字0-7
日期:2020-04-13
作者:lixs
**********************/
#include 5.2 编译
编译过程同1.2一致。
5.3 程序下载
程序下载过程同1.3一致。
5.4 结果展示
- 待上传视频
5.5 常见问题及解决办法
无
6. 独立按键
6.1 代码
/*********************
独立按键实验
实验现象:下载程序后按下K1按键可以对D1灯状态取反
日期:2020-04-13
作者:lixs
**********************/
#include 6.2 编译
编译过程同1.2一致。
6.3 程序下载
程序下载过程同1.3一致。
6.4 结果展示
- 待上传视频
6.5 常见问题及解决办法
无
7. 矩阵按键
7.1 代码
/*********************
矩阵按键实验
实验现象:下载程序后数码管显示0,按下矩阵按键上的按键显示对应的数字
日期:2020-04-13
作者:lixs
**********************/
#include 7.2 编译
编译过程同1.2一致。
7.3 程序下载
程序下载过程同1.3一致。
7.4 结果展示
- 待上传视频
7.5 常见问题及解决办法
无
8. 单片机IO扩展–74HC595
8.1 代码
/*********************
点阵LED实验
实验现象:下载程序后,
点阵LED灯从左往右依次点
亮,类似流水灯效果
日期:2020-04-14
作者:lixs
**********************/
#include 8.2 编译
编译过程同1.2一致。
8.3 程序下载
程序下载过程同1.3一致。
8.4 结果展示
- 待上传视频
8.5 常见问题及解决办法
无
9. LED点阵(点亮一个点)
9.1 代码
/*********************
点阵LED实验
实验现象:下载程序后,
点阵LED灯第一个点亮
日期:2020-04-14
作者:lixs
**********************/
#include 9.2 编译
编译过程同1.2一致。
9.3 程序下载
程序下载过程同1.3一致。
9.4 结果展示
- 待上传视频
9.5 常见问题及解决办法
无
10. LED点阵(显示数字)
10.1 代码
/*********************
点阵LED(点亮数字)实验
实验现象:下载程序后,
点阵LED显示数字0
日期:2020-04-16
作者:lixs
**********************/
#include 10.2 编译
编译过程同1.2一致。
10.3 程序下载
程序下载过程同1.3一致。
10.4 结果展示
- 待上传视频
10.5 常见问题及解决办法
无
11. 直流电机
11.1 代码
/*********************
独立开关控制直流电机实验
实验现象:下载程序后,按
下独立按键,电机旋转
日期:2020-04-16
作者:lixs
**********************/
#include 11.2 编译
编译过程同1.2一致。
11.3 程序下载
程序下载过程同1.3一致。
11.4 结果展示
- 待上传视频
11.5 常见问题及解决办法
无
12. 外部中断0
12.1 代码
/*********************
外部中断0实验
实验现象:下载程序后,操
作K3按键使D1状态取反
日期:2020-04-17
作者:lixs
**********************/
#include 12.2 编译
编译过程同1.2一致。
12.3 程序下载
程序下载过程同1.3一致。
12.4 结果展示
- 待上传视频
12.5 常见问题及解决办法
无
13. 定时器0中断
13.1 代码
/*********************
定时器0中断实验
实验现象:下载程序后,
D1灯循环点亮1秒,熄灭1秒
日期:2020-04-18
作者:lixs
**********************/
#include 13.2 编译
编译过程同1.2一致。
13.3 程序下载
程序下载过程同1.3一致。
13.4 结果展示
- 待上传视频
13.5 常见问题及解决办法
无
14. 串口通信
14.1 代码
#include 14.2 编译
编译过程同1.2一致。
14.3 程序下载
程序下载过程同1.3一致。
14.4 结果展示
- 待上传视频
14.5 常见问题及解决办法
无
15. EEPROM-IIC
15.1 代码
/*********************
i2c驱动程序
实验现象:
日期:2020-04-18
作者:lixs
**********************/
#include "i2c.h"
//延时函数
void Delay10us()
{
unsigned char a,b;
for(b=1;b>0;b--)
for(a=2;a>0;a--);
}
//i2c启动函数
void I2cStart()
{
SDA=1;
Delay10us();
SCL=1;
Delay10us();
SDA=0;
Delay10us();
SCL=0;
Delay10us();
}
//i2c终止函数
void I2cStop()
{
SDA=0;
Delay10us();
SCL=1;
Delay10us();
SDA=1;
Delay10us();
}
//i2c发送数据函数
unsigned char I2cSendByte(unsigned char dat)
{
unsigned char a=0,b=0;
for(a=0;a<8;a++)
{
SDA=dat>>7;
dat=dat<<1;
Delay10us();
SCL=1;
Delay10us();
SCL=0;
Delay10us();
}
SDA=1;
Delay10us();
SCL=1;
while(SDA)
{
b++;
if(b>200)
{
SCL=0;
Delay10us();
return 0;
}
}
SCL=0;
Delay10us();
return 1;
}
//i2c读取数据函数
unsigned char I2cReadByte()
{
unsigned char a=0,dat=0;
SDA=1;
Delay10us();
for(a=0;a<8;a++)
{
SCL=1;
Delay10us();
dat<<=1;
dat|=SDA;
Delay10us();
SCL=0;
Delay10us();
}
return dat;
}
//往24c02的一个地址写入一个数据
void At24c02Write(unsigned char addr,unsigned char dat)
{
I2cStart();
I2cSendByte(0xa0);
I2cSendByte(addr);
I2cSendByte(dat);
I2cStop();
}
//读取24c02的一个地址的一个数据
unsigned char At24c02Read(unsigned char adrr)
{
unsigned char num;
I2cStart();
I2cSendByte(0xa0);
I2cSendByte(adrr);
I2cStart();
I2cSendByte(0xa1);
num=I2cReadByte();
I2cStop();
return num;
}
/*********************
i2c头文件
实验现象:
日期:2020-04-18
作者:lixs
**********************/
#ifndef _I2C_H_
#define _I2C_H_
#include /*********************
i2c实验
实验现象:下载程序后,
数码管后4位显示0,按下
k1保存显示的数据,按下k2
读取上次保存的数据,按下
k3显示数据加1,按下k4显示
数据清零。最大能写入的数据
是255
日期:2020-04-18
作者:lixs
**********************/
#include 15.2 编译
编译过程同1.2一致。
15.3 程序下载
程序下载过程同1.3一致。
15.4 结果展示
- 待上传视频
15.5 常见问题及解决办法
无
16. DS18B20温度传感器
16.1 代码
初始化函数
#include "temp.h"
//延时函数
void Delay1ms(uint y)
{
uint x;
for(;y>0;y--)
{
for(x=110;x>0;x--);
}
}
//初始化函数
uchar Ds18b20Init()
{
uchar i;
DSPORT=0;//将总线拉低
i=70;
while(i--);//延时642us
DSPORT=1;//然后拉高总线,如果DS18B20做出反应会将在15us~60us后总线拉低
i=0;
while(DSPORT)
{
Delay1ms(1);
i++;
if(i>5)//等待>5ms
{
return 0;//初始化失败
}
}
return 1;//初始化成功
}
//向18B20写入一个字节
void Ds18b20WriteByte(uchar dat)
{
uint i,j;
for(j=0;j<8;j++)
{
DSPORT=0;//每写入一位数据之前先把总线拉低1us
i++;
DSPORT=dat & 0x01;//然后写入一个数据,从最低位开始
i=6;
while(i--);//延时68us,持续时间最少60us
DSPORT=1;//然后释放总线,至少1us给总线恢复时间才能接着写入第二个数值
dat>>=1;
}
}
//读取一个字节
uchar Ds18b20ReadByte()
{
uchar byte,bi;
uint i,j;
for(j=8;j>0;j--)
{
DSPORT=0;//先将总线拉低1us
i++;
DSPORT=1;//然后释放总线
i++;
i++;//延时6us等待数据稳定
bi=DSPORT;//读取数据,从最低位开始读取
//将byte左移一位,然后与上右移7位后的bi,注意移动之后移掉那位补0
byte=(byte>>1)|(bi<<7);
i=4;//读取完之后等待48us再接着读取下一个数
while(i--);
}
return byte;
}
//让18b20开始转换温度
void Ds18b20ChangTemp()
{
Ds18b20Init();
Delay1ms(1);
Ds18b20WriteByte(0xcc);//跳过ROM操作指令
Ds18b20WriteByte(0x44);//温度转换命令
//Delay1ms(100);//等待转换成功,而如果你是一只刷着的话,就不用这个延时了
}
//发送读取温度命令
void Ds18b20ReadTempCom()
{
Ds18b20Init();
Delay1ms(1);
Ds18b20WriteByte(0xcc);//跳过ROM操作指令
Ds18b20WriteByte(0xbe);//温度转换命令
}
//读取温度
int Ds18b20ReadTemp()
{
int temp=0;
uchar tmh,tml;
Ds18b20ChangTemp();//先写入转换命令
Ds18b20ReadTempCom();//然后等待转换完成后发送读取温度命令
tml=Ds18b20ReadByte();//读取温度值共16位,先读低字节
tmh=Ds18b20ReadByte();//再读高字节
temp=tmh;
temp<<=8;
temp|=tml;
return temp;
}
主函数
/*********************
DS18b02温度传感器实验
实验现象:下载程序后,数码管会显示检测到的温度值
日期:2020-04-20
作者:lixs
**********************/
#include 头文件
#ifndef _TEMP_H_
#define _TEMP_H_
#include 16.2 编译
编译过程同1.2一致。
16.3 程序下载
程序下载过程同1.3一致。
16.4 结果展示
- 待上传视频
16.5 常见问题及解决办法
无
17. DS1302时钟
17.1 代码
初始化函数
#include "ds1302.h"
//DS1302写入和读取时分秒的地址命令
//秒分时日月周年最低位读写位
uchar code READ_RTC_ADDR[7]={0x81,0x83,0x85,0x87,0x89,0x8b,0x8d};//读地址{秒,分,小时,日,月,星期,年}
uchar code WRITE_RTC_ADDR[7]={0x80,0x82,0x84,0x86,0x88,0x8a,0x8c};//写地址{秒,分,小时,日,月,星期,年}
//DS1302时钟初始化2016年5月7日星期六12点00分00秒
//存储顺序是秒分时日月周年,存储格式是用BCD码
uchar TIME[7]={0,0,0x12,0x07,0x05,0x06,0x16};//{秒,分,时,日,月,星期,年}
//单片机向DS1302发送(地址+数据)
void Ds1302Write(uchar addr,uchar dat)
{
uchar n;
RST=0;
_nop_();
SCLK=0;//先将SCLK置于低电平
_nop_();
RST=1;//然后将RST(CE)置高电平
_nop_();
for(n=0;n<8;n++)//开始传送8位地址命令
{
DSIO=addr & 0x01;//数据从低位开始传送
addr>>=1;
SCLK=1;//数据在上升沿时,DS1302读取数据
_nop_();
SCLK=0;
_nop_();
}
for(n=0;n<8;n++)
{
DSIO=dat & 0x01;
dat>>=1;
SCLK=1;
_nop_();
SCLK=0;
_nop_();
}
RST=0;//传送数据结束
_nop_();
}
//读取一个地址的数据
uchar Ds1302Read(uchar addr)
{
uchar n,dat,dat1;
RST=0;
_nop_();
SCLK=0;
_nop_();
RST=1;
_nop_();
for(n=0;n<8;n++)//开始传送8位地址命令
{
DSIO=addr & 0x01;//数据从低位开始传送
addr>>=1;
SCLK=1;//数据在上升沿时,DS1302读取数据
_nop_();
SCLK=0;
_nop_();//数据在下降沿时,放置数据
}
_nop_();
for(n=0;n<8;n++)//读取8位数据
{
dat1=DSIO;//从最低位开始接收,DISO从低位开始依次发送8位数据*********
dat=(dat>>1)|(dat1<<7);//将DSIO的最低位左移7位至最高位,然后将dat右移1位,
//即最高位置0,即可将DSIO的最高位放置dat中,循环8次即可将addr数据放置dat中
SCLK=1;
_nop_();
SCLK=0;
_nop_();
}
RST=0;
_nop_();//以下为DS1302复位的稳定时间
SCLK=1;
_nop_();
DSIO=0;
_nop_();
DSIO=1;
_nop_();
return dat;
}
//初始化DS1302
void Ds1302Init()
{
uchar n;
Ds1302Write(0x8e,0x00);//关闭写保护功能
for(n=0;n<7;n++)
{
Ds1302Write(WRITE_RTC_ADDR[n],TIME[n]);
}
Ds1302Write(0x8e,0x80);//打开写保护
}
//读取时钟信息
void Ds1302ReadTime()
{
uchar n;
for(n=0;n<7;n++)//读取7个字节的时钟信号:分秒时日月周年
{
TIME[n]=Ds1302Read(READ_RTC_ADDR[n]);
}
}
主函数
/*********************
DS1302时钟实验
实验现象:下载程序后,数码管会显示时钟
日期:2020-04-21
作者:lixs
**********************/
#include 头文件
#ifndef _DS1302_H_
#define _DS1302_H_
//包含头文件
#include 17.2 编译
编译过程同1.2一致。
17.3 程序下载
程序下载过程同1.3一致。
17.4 结果展示
- 待上传视频
17.5 常见问题及解决办法
无
18. AD模数转换
18.1 代码
初始化函数
#include "XPT2046.h"
//使用SPI写入数据
void SPI_Write(uchar dat)
{
uchar i;
CLK=0;
for(i=0;i<8;i++)
{
DIN=dat>>7;//放置最高位
dat<<=1;
CLK=0;
CLK=1;
}
}
//使用SPI读数据
uint SPI_Read(void)
{
uint i,dat=0;
CLK=0;
for(i=0;i<12;i++)
{
dat<<=1;
CLK=1;
CLK=0;
dat|=DOUT;
}
return dat;
}
//读取电位器数据
uint Read_AD_Data(uchar cmd)
{
uchar i;
uint AD_Value;
CLK=0;
CS=0;
SPI_Write(cmd);
for(i=6;i>0;i--);//延时等待转换结果
CLK=1;//发送一个时钟周期,清楚BUSY
_nop_();
_nop_();
CLK=0;
_nop_();
_nop_();
AD_Value=SPI_Read();
CS=1;
return AD_Value;
}
主函数
/*********************
AD模数转换实验
实验现象:下载程序后,
数码管前4位显示电位器检测
的AD值,范围是0-4095
日期:2020-04-28
作者:lixs
**********************/
#include 头文件
#ifndef _XPT2046_H_
#define _XPT2046_H_
//包含头文件
#include 18.2 编译
编译过程同1.2一致。
18.3 程序下载
程序下载过程同1.3一致。
18.4 结果展示
- 待上传视频
18.5 常见问题及解决办法
1、怎么把读取到的数值转为电压值?
答:ADC_Voltage=ADC_Value*2.5/4096,ADC_Value为读到的数值,2.5为参考电压,4096为2^12(根据分辨率决定)。
2、注意进行电压转换时,ADC_Voltage和ADC_Value需要为浮点型数据。
19. DA数模转换
19.1 代码
/*********************
DA数模转换实验
实验现象:下载程序后,
DA模块上的DA1指示灯呈
呼吸灯效果,由暗变亮再
由亮变暗
日期:2020-04-29
作者:lixs
**********************/
#include
{
count=0;
if(DIR==1)
{
value++;
}
if(DIR==0)
{
value--;
}
}
if(value==1000)
{
DIR=0;
}
if(value==0)
{
DIR=1;
}
if(timer1>1000)//PWM周期为1000*1us=1ms
{
timer1=0;
}
if(timer1<value)
{
PWM=1;
}
else
{
PWM=0;
}
}
}
//定时器的中断函数
void Time1(void) interrupt 3
{
TH1=0XFF;
TL1=0XFF;
timer1++;
count++;
}
19.2 编译
编译过程同1.2一致。
19.3 程序下载
程序下载过程同1.3一致。
19.4 结果展示
- 待上传视频
19.5 常见问题及解决办法
无
20. LCD1602液晶
20.1 代码
初始化函数
#include "lcd.h"
//延时函数
void Lcd1602_Delay1ms(uint c)
{
uchar a,b;
for(;c>0;c--)
{
for(b=199;b>0;b--)
{
for(a=1;a>0;a--);
}
}
}
//向LCD写入一个字节的命令
#ifndef LCD1602_4PINS
void LcdWriteCom(uchar com)
{
LCD1602_E=0; //使能
LCD1602_RS=0; //选择发送命令
LCD1602_RW=0; //选择写入
LCD1602_DATAPINS=com; //放入命令
Lcd1602_Delay1ms(1); //等待数据稳定
LCD1602_E=1; //写入时序
Lcd1602_Delay1ms(5); //保持时间
LCD1602_E=0;
}
#else
void LcdWriteCom(uchar com)
{
LCD1602_E=0; //使能
LCD1602_RS=0; //选择发送命令
LCD1602_RW=0; //选择写入
LCD1602_DATAPINS=com; //放入命令
Lcd1602_Delay1ms(1); //等待数据稳定
LCD1602_E=1; //写入时序
Lcd1602_Delay1ms(5); //保持时间
LCD1602_E=0;
LCD1602_DATAPINS=com<<4; //发送低四位
Lcd1602_Delay1ms(1);
LCD1602_E=1; //写入时序
Lcd1602_Delay1ms(5); //保持时间
LCD1602_E=0;
}
#endif
//向LCD写入一个字节的数据
#ifndef LCD1602_4PINS
void LcdWriteData(uchar dat)
{
LCD1602_E=0; //使能
LCD1602_RS=1; //选择输入数据
LCD1602_RW=0; //选择写入
LCD1602_DATAPINS=dat; //写入数据
Lcd1602_Delay1ms(1); //等待数据稳定
LCD1602_E=1; //写入时序
Lcd1602_Delay1ms(5); //保持时间
LCD1602_E=0;
}
#else
void LcdWriteData(uchar dat)
{
LCD1602_E=0; //使能
LCD1602_RS=1; //选择写入数据
LCD1602_RW=0; //选择写入
LCD1602_DATAPINS=dat; //放入命令
Lcd1602_Delay1ms(1); //等待数据稳定
LCD1602_E=1; //写入时序
Lcd1602_Delay1ms(5); //保持时间
LCD1602_E=0;
LCD1602_DATAPINS=dat<<4; //发送低四位
Lcd1602_Delay1ms(1);
LCD1602_E=1; //写入时序
Lcd1602_Delay1ms(5); //保持时间
LCD1602_E=0;
}
#endif
//初始化LCD屏
#ifndef LCD1602_4PINS
void LcdInit()
{
LcdWriteCom(0x38); //开显示
LcdWriteCom(0x0c); //开显示不显示光标
LcdWriteCom(0x06); //写一个指针加1
LcdWriteCom(0x01); //清屏
LcdWriteCom(0x80); //设置数据指针起点
}
#else
void LcdInit()
{
LcdWriteCom(0x32); //将8位总线转为4位总线
LcdWriteCom(0x28); //在四位线下的初始化
LcdWriteCom(0x0c); //开显示不显示光标
LcdWriteCom(0x06); //写一个指针加1
LcdWriteCom(0x01); //清屏
LcdWriteCom(0x80); //设置数据指针起点
}
#endif
主函数
/*********************
LCD1602液晶实验
实验现象:下载程序后,插
上LCD1602液晶,即可显示Hello World
日期:2020-04-29
作者:lixs
**********************/
#include "reg52.h"
#include "lcd.h"
typedef unsigned int u16;
typedef unsigned char u8;
u8 Disp[]=" Hello World ";
void main()
{
u8 i;
LcdInit();
for(i=0;i<13;i++)
{
LcdWriteData(Disp[i]);
}
while(1);
}
头文件
#ifndef _LCD_H_
#define _LCD_H_
/*当使用的是4位数据传输的时候定义,使用8位取消这个定义*/
//#define LCD1602_4PINS
#include 20.2 编译
编译过程同1.2一致。
20.3 程序下载
程序下载过程同1.3一致。
20.4 结果展示
- 待上传视频
20.5 常见问题及解决办法
无
普中51-单核-A2开发板的基础实验例程分享至此结束,本来打算紧接着下一篇做中级实验教程,后来由于工作,间隔了一段时间,感觉基础知识还是没吃透,所以下一篇准备做一下郭天祥的51单片机教程的课后题,温故而知新。因为手里没有开发板,到时会用proteus仿真进行结果展示,我会尽快整理完后分享给大家!(PS:关于本文章的例程结果展示动画,我会尽快补回来!!!)