SlimYOLOv3:更窄、更快、更好的无人机目标检测算法
点击我爱计算机视觉标星,更快获取CVML新技术
无人机因为硬件计算能力较弱,要在其上实现实时的目标检测,需要算法参数量小、占用内存少、推断时间短。常见的算法往往难以直接应用。
一种比较直接的做法是对模型进行剪枝,尽量减少模型卷积层不必要的通道。
今天arXiv新上论文SlimYOLOv3: Narrower, Faster and Better for Real-Time
UAV Applications,作者对YOLOv3的改进版进行了剪枝,在参数量、占用内存、推断时间大幅减少的情况下,在无人机目标检测数据集上实现了与原算法可比较的检测精度。
作者已将代码开源,包含训练和测试部分,值得从事相关工程开发的朋友参考。
以下是作者信息:
作者全部来自北京理工大学。
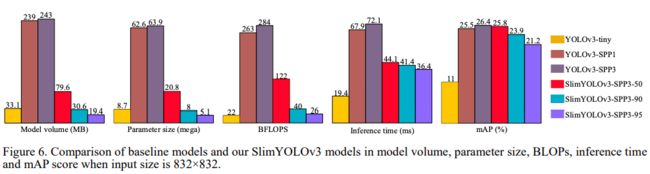
下图为作者发明的三种设置下的SlimYOLOv3 相比较基线版本的YOLOv3的结果:

YOLOv3-tiny 是YOLOv3的一种快速算法,但精度下降太多。
YOLOv3-SPP1 是YOLOv3加上SPP模块的改进,其比原始YOLOv3精度要高。
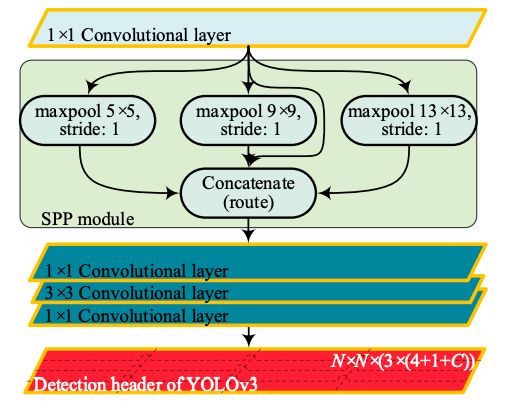
YOLOv3模型中加入SPP模块的示意图,作者是在原第5和第6卷积层之间加SPP模块
YOLOv3-SPP3 是该文作者YOLOv3-SPP1的改进,其有3个SPP模块,比YOLOv3-SPP1精度更高,是本文模型剪枝的基础模型。
SlimYOLOv3-SPP3-50/90/95,是YOLOv3-SPP3模型剪枝率分别为50%、90%、95%的三个模型。
可见模型剪枝可大幅改善模型在无人机上的部署,有一定的精度损失,但远比YOLOv3-tiny要好。
剪枝过程
什么是深度模型的剪枝?就像论文名字中的更窄(Narrower),它是要减少模型通道数。
去除每个卷积层中不重要的特征通道。所以需要合理地评估特征通道的重要性。
下图可以较为明了地说明整个过程。
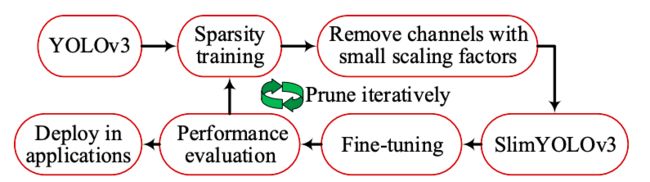
YOLOv3经过稀疏训练,得到各通道的尺度因子,然后去除那些尺度因子小的通道,将剪枝得到的模型SlimYOLOv3在数据集上进一步微调,得到检测结果,然后进入下一轮的稀疏训练。以上剪枝过程是迭代重复的,直到满足一定的模型条件,比如模型剪枝率达到一定要求。
实验结果
作者通过上述方法,在配置为 Intel(R) Xeon(R) E5-2683 v3 CPU @ 2.00GHz (56 CPUs), 64GB RAM, 4 个 NVIDIA GTX1080ti GPU的 Linux 机器上训练,得到三个剪枝模型,并在无人机目标检测数据集 VisDrone2018-Det上进行了实验,结果如下:
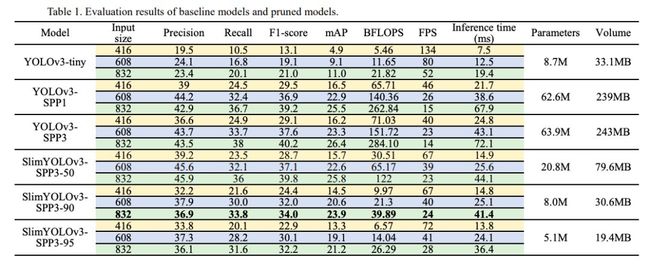
可见在精度稍有下降的情况下,推断时间(Inference time)、参数量(Parameters)、内存占用(Volume)大幅减少,更适合在无人机部署。
下图为各算法结果比较的柱状图,更加直观。
检测结果示例:

作者已将代码开源,各位读者可以非常方便地进行训练和测试。
每个步骤仅需要一行命令!
原始模型训练:
./darknet/darknet detector train VisDrone2019/drone.data cfg/yolov3-spp3.cfg darknet53.conv.74.weights
稀疏训练:
python yolov3/train_drone.py --cfg VisDrone2019/yolov3-spp3.cfg --data-cfg VisDrone2019/drone.data -sr --s 0.0001 --alpha 1.0
通道剪枝:
python yolov3/prune.py --cfg VisDrone2019/yolov3-spp3.cfg --data-cfg VisDrone2019/drone.data --weights yolov3-spp3_sparsity.weights --overall_ratio 0.5 --perlayer_ratio 0.1
模型微调:
./darknet/darknet detector train VisDrone2019/drone.data cfg/prune_0.5.cfg weights/prune_0.5/prune.weights
论文地址:
https://arxiv.org/pdf/1907.11093v1.pdf
代码地址:
https://github.com/PengyiZhang/SlimYOLOv3
感谢论文作者的分享!
更多阅读:
移动端70+fps!谷歌新出高效实时视频目标检测
ThunderNet:国防科大、旷视提出首个在ARM上实时运行的通用目标检测算法
YOLO-LITE:专门面向CPU的实时目标检测
52CV正在组织高科技产品!抽奖送【车萝卜小蜜】活动,27日23点开奖,欢迎参加!
目标检测微信群
关注最新的目标检测技术,欢迎加入目标检测专业交流群,扫码添加CV君拉你入群,
(请务必注明:目标检测)

喜欢在QQ交流的童鞋,可以加52CV官方QQ群:805388940。
(不会时时在线,如果没能及时通过验证还请见谅)

长按关注我爱计算机视觉