基于帧间差分法的运动目标检测
环境 win7 + vs2015 + Opencv2.4.13
基于帧间差分法的运动目标检测
1)运动目标:需要研究的运动物体;
2)背景噪声:没有被检测出来的运动目标区域。
3)前景噪声:前景噪声是指被认定已发生了图像变化,然而并不包含任何运动目标的区域。
4)反射:在物体的边缘,或反射能力强的物体(如地板,钢管等)表面,由于光线极其不稳定而被当成变化物体检测出来。
5)阴影:运动目标在地面等物体上产生阴影,也被当成运动目标检测出来。
6)鬼影:过去某时刻的运动目标进入背景模型,在当前时刻被当成运动目标检测出来。
7)干扰:对检测结果可能产生影响的因素,如摄像机自身抖动、以及背景中出现的运动的物体,如晃动的树木,闪烁的显示屏,喷泉等。
二、原理
摄像机采集的视频序列具有连续性的特点。如果场景内没有运动目标,则连续帧的变化很微弱,如果存在运动目标,则连续的帧和帧之间会有明显地变化。
帧间差分法就是借鉴了上述思想。由于场景中的目标在运动,目标的影像在不同图像帧中的位置不同。该类算法对时间上连续的两帧或三帧图像进行差分运算,不同帧对应的像素点相减,判断灰度差的绝对值,当绝对值超过一定阈值时,即可判断为运动目标,从而实现目标的检测功能
代码实现:
#include "opencv2/opencv.hpp"
#include
using namespace cv;
using namespace std;
//运动物体检测函数
Mat MoveDetect(Mat temp, Mat frame);
int main(int argc, char** argv)
{
VideoCapture video("video.avi");//定义VideoCapture类video
Mat frame;//存储帧
Mat temp;//存储前一帧图像
Mat result;//存储结果图像
int i = 0;
while (1) {
video >> frame;//读帧进frame
imshow("frame", frame);
waitKey(30);
if (i == 0)//如果为第一帧(temp还为空)
{
result = MoveDetect(frame, frame);//调用MoveDetect()进行运动物体检测,返回值存入result
i++;
}
else//若不是第一帧(temp有值了)
{
result = MoveDetect(temp, frame);//调用MoveDetect()进行运动物体检测,返回值存入result
}
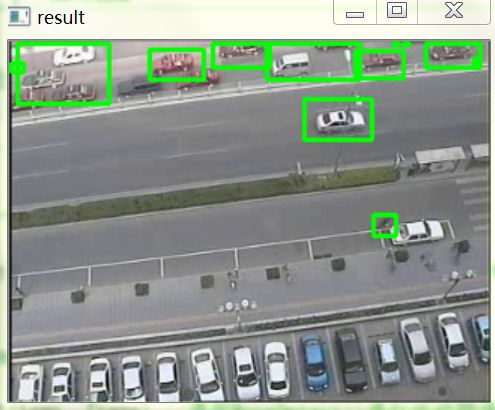
imshow("result", result);
temp = frame.clone();
}
return 0;
}
Mat MoveDetect(Mat temp, Mat frame)
{
Mat result = frame.clone();
//1.将background和frame转为灰度图
Mat gray1, gray2;
cvtColor(temp, gray1, CV_BGR2GRAY);
cvtColor(frame, gray2, CV_BGR2GRAY);
//2.将background和frame做差
Mat diff;
absdiff(gray1, gray2, diff);
imshow("diff", diff);
//3.对差值图diff_thresh进行阈值化处理
Mat diff_thresh;
threshold(diff, diff_thresh, 10, 255, CV_THRESH_BINARY);
imshow("diff_thresh", diff_thresh);
GaussianBlur(diff_thresh, diff_thresh, Size(3, 3), 0, 0);
//4.腐蚀
Mat kernel_erode = getStructuringElement(MORPH_RECT, Size(3, 3));
Mat kernel_dilate = getStructuringElement(MORPH_RECT, Size(5, 5));
erode(diff_thresh, diff_thresh, kernel_erode);
//imshow("erode", diff_thresh);
//5.膨胀
dilate(diff_thresh, diff_thresh, kernel_dilate);
imshow("dilate", diff_thresh);
//6.查找轮廓并绘制轮廓
vector> contours;
findContours(diff_thresh, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);
//drawContours(result, contours, -1, Scalar(0, 0, 255), 2);//在result上绘制轮廓
//7.查找正外接矩形
vector boundRect(contours.size());
for (int i = 0; i < contours.size(); i++)
{
boundRect[i] = boundingRect(contours[i]);
rectangle(result, boundRect[i], Scalar(0, 255, 0), 2);//在result上绘制正外接矩形
}
return result;//返回result
}