Python 实现局域网视频聊天工具笔记
- 引言
- 1. 内容简介
- 2. 实验知识点
- 3.实验环境
- 实验步骤
- 环境搭建
- 代码实现
- 加入音频的捕获和传输
- 编写程序入口 main.py
- 总结
引言
做了下实验楼的关于Python 实现局域网视频聊天工具 ,感觉还不错,作为练习opencv和socket的小脚本入门了。
1. 内容简介
- 本实验实现简易的视频通信工具
- 在视频通信的基础上加入语音
- 用户可以选择通信的质量,即画质、停顿等参数
- 支持IPv6
2. 实验知识点
本课程项目完成过程中将学习:
- Python 基于 OpenCV 对摄像头信息的捕获和压缩
- Python 关于 线程 和 socket 通信的一些基础技巧
- Python 基于 PyAudio 对语音信息的捕获和压缩
其中将重点介绍 socket 传输过程中对数据的压缩和处理。
3.实验环境
- python 3.5
- opencv-python 3.4.1.15
- numpy 1.14.5
- PyAudio 0.2.11
实验步骤
环境搭建
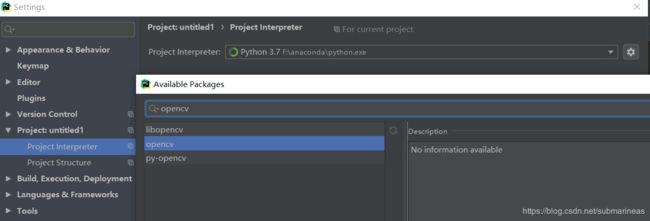
首先关于实验所需要用到的包,opencv-python和PyAudio并不是太好装,我简单讲一下我的安装步骤。
因为我自己电脑Windows下的是anaconda,关于opencv的python第三方包如果是在conda环境下查找,会发现找不到,那么使用pip安装同样会出现四次retry,然后安装失败。所以建议最好创建一个python的虚拟环境,便于直接install,而不需要找什么本地whl文件,或者换源等等,比较麻烦。
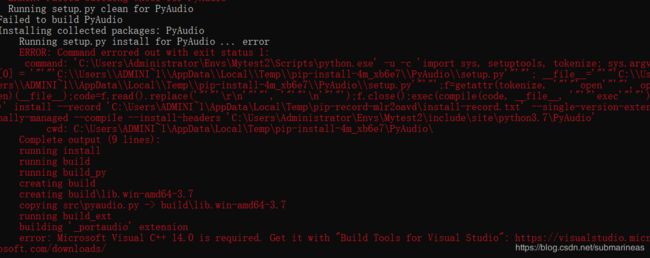
另外就是PyAudio==0.2.11,这个包是已经很久没有更新过了,但这并不意味着它适配不了新的python环境,已经编译不了了。它的安装百度到的答案,或者说pypi推荐的安装方式都是pip install PyAudio == 0.2.11,但就最新的python3.6到3.7版本来讲,我是没有安装成功的,原因应该都是报这个错吧:
error: Microsoft Visual C++ 14.0 is required. Get it with "Build Tools for Visual Studio":
于是继续百度,发现推荐的都是去找PyAudio-0.2.11-cp36-cp36m-win_amd64.whl文件,然后我也去找了,但可能是我python是3.7的原因,我并没有安装成功。报错为:
>>> pip install D:\Downloads\PyAudio-0.2.11-cp36-cp36m-win_amd64.whl
ERROR: PyAudio-0.2.11-cp36-cp36m-win_amd64.whl is not a supported wheel on this platform.
这里卡了很久,再次发现国内博客都是抄来抄去的,中间还有其它事情,直到第二天搭梯子谷歌了一下,终于找到了答案:
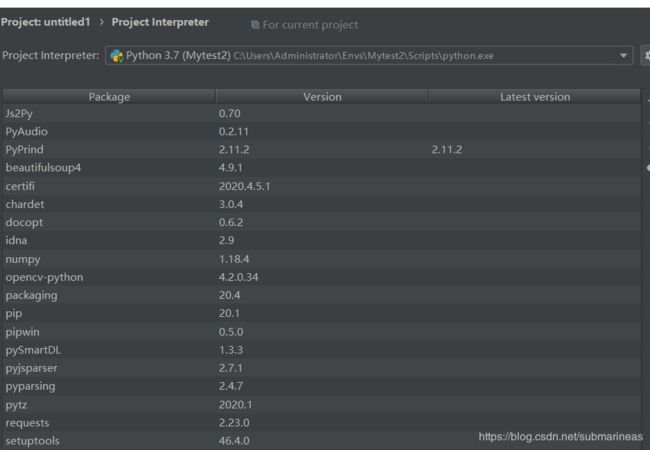
pip install pipwin # 安装当前pip环境下的所有必要依赖的包
pipwin install pyaudio # 成功安装
当然还有一种方式,是去GitHub将包的源码拷贝到本地重命名,不过我不喜欢这么做。
https://github.com/intxcc/pyaudio_portaudio/releases
代码实现
先为双方的通信设计 Server 类和 Client类,两个类均继承 threading.Thread并实现双向的C / S连接,只需要分别实现 init、__del__和run方法,之后对象调用.start()方法即可在独立线程中执行run方法中的内容。首先Client类需要存储远端的IP地址和端口,而Server类需要存储本地服务器监听的端口号。用户还应当可以指定通信双方使用的协议版本,即基于IPv4 还是IPv6 的TCP连接。因此Server类的初始化需要传入两个参数(端口、版本),Client类的初始化需要三个参数(远端IP、端口、版本)。新建文件vchat.py,在其中定义基础的两个类,另外捕获视频流的任务应当由Client类完成,一起完善为:
from socket import *
import threading
class Video_Server(threading.Thread):
def __init__(self, port, version) :
threading.Thread.__init__(self)
self.setDaemon(True) # 设置守护线程,必须在t.start()之前设置
self.ADDR = ('', port)
if version == 4: # ipv4版本,client要与之对应
self.sock = socket(AF_INET ,SOCK_STREAM) # 创建TCP连接,ipv4版本
else:
self.sock = socket(AF_INET6 ,SOCK_STREAM) # 创建TCP连接,ipv6版本
def __del__(self):
self.sock.close()
# TODO
def run(self):
print("server starts...")
self.sock.bind(self.ADDR)
self.sock.listen(1) # 操作系统可以挂起的最大连接数,如果同一时间的连接数超过1,拒绝其他的连接
conn, addr = self.sock.accept() # 接收客户端的请求,且获取新socket对象和客户端信息
print("remote client success connected...")
# TODO
class Video_Client(threading.Thread):
def __init__(self ,ip, port, version):
threading.Thread.__init__(self)
self.setDaemon(True)
self.ADDR = (ip, port)
if version == 4:
self.sock = socket(AF_INET, SOCK_STREAM)
else:
self.sock = socket(AF_INET6, SOCK_STREAM)
self.cap = cv2.VideoCapture(0) # 创建一个成员变量cap
def __del__(self) :
self.sock.close()
self.cap.release()
def run(self):
print("client starts...")
while True:
try:
self.sock.connect(self.ADDR)
break
except:
time.sleep(3)
continue
print("client connected...")
while self.cap.isOpened(): # 如果连接上了,进入循环读相应的文件,这里也可以try一下,没有连接上接收异常,这样的语法不好排错
ret, frame = self.cap.read() # 读
已经捕获到数据,接下来要发送字节流。首先我们继续编写Client,为其添加发送数据功能的实现。这里只改动了run方法。在捕获到帧后,我们使用pickle.dumps方法对其打包,并用sock.sendall方法发送。注意发送过程中我们用struct.pack方法为每批数据加了一个头,用于接收方确认接受数据的长度。
def run(self):
while True:
try:
self.sock.connect(self.ADDR)
break
except:
time.sleep(3)
continue
print("client connected...")
while self.cap.isOpened():
ret, frame = self.cap.read()
data = pickle.dumps(frame)
try:
"""
将len(data)等参数的值进行一层包装,包装的方法由fmt指定。被包装的参数必须严格符合fmt。最后返回一个包装后的字符串。
"""
self.sock.sendall(struct.pack("L", len(data)) + data)
except:
break
下面编写Server,在服务器端连接成功后,应当创建一个窗口用于显示接收到的视频。因为连接不一定创建成功,因此cv.destroyAllWindows()被放在一个try…catch块中防止出现错误。在接收数据过程中,我们使用payload_size记录当前从缓冲区读入的数据长度,这个长度通过struct.calcsize(‘L’)来读取。使用该变量的意义在于缓冲区中读出的数据可能不足一个帧,也可能由多个帧构成。为了准确提取每一帧,我们用payload_size区分帧的边界。在从缓冲区读出的数据流长度超过payload_size时,剩余部分和下一次读出的数据流合并,不足payload_size时将合并下一次读取的数据流到当前帧中。在接收完完整的一帧后,显示在创建的窗口中。同时我们为窗口创建一个键盘响应,当按下Esc 或 q键时退出程序。
另外当用户指定使用低画质通信,我们应当对原始数据做变换,最简单的方式即将捕获的每一帧按比例缩放,同时降低传输的帧速,在代码中体现为resize,该函数的第二个参数为缩放中心,后两个参数为缩放比例,并且根据用户指定的等级,不再传输捕获的每一帧,而是间隔几帧传输一帧。为了防止用户指定的画质过差,代码中限制了最坏情况下的缩放比例为0.3,最大帧间隔为3。此外,我们在发送每一帧的数据前使用zlib.compress对其压缩,尽量降低带宽负担。
所以完整代码为:
class Video_Server(threading.Thread):
def __init__(self, port, version) :
threading.Thread.__init__(self)
self.setDaemon(True)
self.ADDR = ('', port)
if version == 4:
self.sock = socket(AF_INET ,SOCK_STREAM)
else:
self.sock = socket(AF_INET6 ,SOCK_STREAM)
def __del__(self):
self.sock.close()
try:
cv2.destroyAllWindows()
except:
pass
def run(self):
print("VIDEO server starts...")
self.sock.bind(self.ADDR)
self.sock.listen(1)
conn, addr = self.sock.accept()
print("remote VIDEO client success connected...")
data = "".encode("utf-8")
payload_size = struct.calcsize("L") # 结果为4
cv2.namedWindow('Remote', cv2.WINDOW_NORMAL)
while True:
while len(data) < payload_size:
data += conn.recv(81920)
packed_size = data[:payload_size]
data = data[payload_size:]
msg_size = struct.unpack("L", packed_size)[0]
while len(data) < msg_size:
data += conn.recv(81920)
zframe_data = data[:msg_size]
data = data[msg_size:]
frame_data = zlib.decompress(zframe_data)
frame = pickle.loads(frame_data)
cv2.imshow('Remote', frame)
if cv2.waitKey(1) & 0xFF == 27:
break
class Video_Client(threading.Thread):
def __init__(self ,ip, port, level, version):
threading.Thread.__init__(self)
self.setDaemon(True)
self.ADDR = (ip, port)
if level <= 3:
self.interval = level
else:
self.interval = 3
self.fx = 1 / (self.interval + 1)
if self.fx < 0.3: # 限制最大帧间隔为3帧
self.fx = 0.3
if version == 4:
self.sock = socket(AF_INET, SOCK_STREAM)
else:
self.sock = socket(AF_INET6, SOCK_STREAM)
self.cap = cv2.VideoCapture(0)
def __del__(self) :
self.sock.close()
self.cap.release()
def run(self):
print("VIDEO client starts...")
while True:
try:
self.sock.connect(self.ADDR)
break
except:
time.sleep(3)
continue
print("VIDEO client connected...")
while self.cap.isOpened():
ret, frame = self.cap.read()
sframe = cv2.resize(frame, (0,0), fx=self.fx, fy=self.fx)
data = pickle.dumps(sframe)
zdata = zlib.compress(data, zlib.Z_BEST_COMPRESSION)
try:
self.sock.sendall(struct.pack("L", len(zdata)) + zdata)
except:
break
for i in range(self.interval):
self.cap.read()
里面有些代码上面的大段应该解释得比较清楚,如果还有不明白的,可以看作者的推荐,还有我找到的一些资料链接:
struct.pack()、struct.unpack()和struct.calcsize()
Python 网络编程
加入音频的捕获和传输
在完成视频通信的基础上,整体框架对于音频通信可以直接挪用,只需要修改其中捕获视频/音频的代码和服务器解码播放的部分。这里我们使用 PyAudio 库处理音频,在 Linux 下你也可以选择 sounddevice。关于sounddevice这里不做过多介绍,可以在这里看到它最新版本的文档。将vchat.py复制一份,重命名为achat.py,简单修改几处,最终音频捕获、传输的完整代码如下。将上面代码中的Server和Client分别加上Video和Audio前缀以区分,同时显示给用户的print输出语句也做了一定修改,对于视频加上VIDEO前缀,音频加上AUDIO前缀。
from socket import *
import threading
import pyaudio
import wave
import sys
import zlib
import struct
import pickle
import time
import numpy as np
CHUNK = 1024
FORMAT = pyaudio.paInt16 # 格式
CHANNELS = 2 # 输入/输出通道数
RATE = 44100 # 音频数据的采样频率
RECORD_SECONDS = 0.5 # 记录秒
class Audio_Server(threading.Thread):
def __init__(self, port, version) :
threading.Thread.__init__(self)
self.setDaemon(True)
self.ADDR = ('', port)
if version == 4:
self.sock = socket(AF_INET ,SOCK_STREAM)
else:
self.sock = socket(AF_INET6 ,SOCK_STREAM)
self.p = pyaudio.PyAudio() # 实例化PyAudio,并于下面设置portaudio参数
self.stream = None
def __del__(self):
self.sock.close() # 关闭套接字
if self.stream is not None:
self.stream.stop_stream() # 暂停播放 / 录制
self.stream.close() # 终止流
self.p.terminate() # 终止会话
def run(self):
print("Video server starts...")
self.sock.bind(self.ADDR)
self.sock.listen(1)
conn, addr = self.sock.accept()
print("remote Video client success connected...")
data = "".encode("utf-8")
payload_size = struct.calcsize("L") # 返回对应于格式字符串fmt的结构,L为4
self.stream = self.p.open(format=FORMAT,
channels=CHANNELS,
rate=RATE,
output=True,
frames_per_buffer = CHUNK
)
while True:
while len(data) < payload_size:
data += conn.recv(81920)
packed_size = data[:payload_size]
data = data[payload_size:]
msg_size = struct.unpack("L", packed_size)[0]
while len(data) < msg_size:
data += conn.recv(81920)
frame_data = data[:msg_size]
data = data[msg_size:]
frames = pickle.loads(frame_data)
for frame in frames:
self.stream.write(frame, CHUNK)
class Audio_Client(threading.Thread):
def __init__(self ,ip, port, version):
threading.Thread.__init__(self)
self.setDaemon(True)
self.ADDR = (ip, port)
if version == 4:
self.sock = socket(AF_INET, SOCK_STREAM)
else:
self.sock = socket(AF_INET6, SOCK_STREAM)
self.p = pyaudio.PyAudio()
self.stream = None
print("AUDIO client starts...")
def __del__(self) :
self.sock.close()
if self.stream is not None:
self.stream.stop_stream()
self.stream.close()
self.p.terminate()
def run(self):
while True:
try:
self.sock.connect(self.ADDR)
break
except:
time.sleep(3)
continue
print("AUDIO client connected...")
self.stream = self.p.open(format=FORMAT,
channels=CHANNELS,
rate=RATE,
input=True,
frames_per_buffer=CHUNK)
while self.stream.is_active():
frames = []
for i in range(0, int(RATE / CHUNK * RECORD_SECONDS)):
data = self.stream.read(CHUNK)
frames.append(data)
senddata = pickle.dumps(frames)
try:
self.sock.sendall(struct.pack("L", len(senddata)) + senddata)
except:
break
Play and Record Sound with Python
PyAudio Documentation¶
以上为参考文档,下面就需要编写启动这两个文件的主函数了。
编写程序入口 main.py
为了提供用户参数解析,代码使用了argparse。你可能对此前几个类中初始化方法的self.setDaemon(True)有疑惑。这个方法的调用使每个线程在主线程结束之后自动退出,保证程序不会出现崩溃且无法销毁的情况。在main.py中,我们通过每隔1s做一次线程的保活检查,如果视频/音频中出现阻塞/故障,主线程会终止。
import sys
import time
import argparse
from vchat import Video_Server, Video_Client
from achat import Audio_Server, Audio_Client
parser = argparse.ArgumentParser()
parser.add_argument('--host', type=str, default='127.0.0.1')
parser.add_argument('--port', type=int, default=10087)
parser.add_argument('--level', type=int, default=1)
parser.add_argument('-v', '--version', type=int, default=4)
args = parser.parse_args()
IP = args.host
PORT = args.port
VERSION = args.version
LEVEL = args.level
if __name__ == '__main__':
vclient = Video_Client(IP, PORT, LEVEL, VERSION)
vserver = Video_Server(PORT, VERSION)
aclient = Audio_Client(IP, PORT+1, VERSION)
aserver = Audio_Server(PORT+1, VERSION)
vclient.start()
aclient.start()
time.sleep(1) # make delay to start server
vserver.start()
aserver.start()
while True:
time.sleep(1)
if not vserver.isAlive() or not vclient.isAlive():
print("Video connection lost...")
sys.exit(0)
if not aserver.isAlive() or not aclient.isAlive():
print("Audio connection lost...")
sys.exit(0)
关于argparse模块,我记得在之前的一篇文章中提到过,现在基本都忘了。。。链接为:
Python利用argparse模块图片转字符文件
如果有不清楚,可以进去看看我对参数画了思维导图。
总结
因为环境都没有提供摄像头,如果需运行,要修改一下代码,让程序从一个本地视频文件读取,模拟摄像头的访问。将Video_Client中self.cap = cv2.VideoCapture(0)改为self.cap = cv2.VideoCapture(‘xxx.mp4’),即从本地视频xxx.mp4中读取。我这里拿了一个B站的MAD来试验,另外,当程序启动时,电脑接收到的声音,因为自己与自己远程,都会有回声。
那么我在Windows环境下运行为: