CentOS 7之Systemd详解之服务单元设置system.service
英文网址:https://www.freedesktop.org/software/systemd/man/systemd.service.html
名称
systemd.service - 服务单元配置
概要
service.service
描述
以 .service 结尾的单元文件,用于封装一个被 systemd 监视与控制的进程。
本手册只列出专用于此种单元的选项,它们全部位于"[Service]"小节之中(通用于所有单元的选项参见 systemd.unit(5) 手册)。
其他可用的选项位于 systemd.exec(5) 手册(定义了命令的执行环境), 以及 systemd.kill(5) 手册(定义了如何结束进程), 以及 systemd.resource-control(5) 手册(定义了进程的资源控制)。
如果要求启动或停止的某个单元文件不存在,systemd 将会寻找同名的SysV初始化脚本(去掉 .service 后缀), 并根据那个同名脚本动态的创建一个 service 单元。这主要用于与传统的SysV兼容(不能保证100%兼容)。 更多与SysV的兼容性可参见 Incompatibilities with SysV 文档。
自动依赖
- 设置了 Type=dbus 的服务会自动添加 Requires=dbus.socket 与 After=dbus.socket 依赖
- 基于套接字激活的服务会自动添加对与其相关的 .socket 单元的 After= 依赖。
除非明确设置了 DefaultDependencies=false,否则 service 单元都自动隐含如下依赖:
- Requires=sysinit.target After=sysinit.target After=basic.target Conflicts=shutdown.target Before=shutdown.target 这样可以确保普通的服务单元:(1)、在基础系统启动完毕之后才开始启动,(2)、在关闭系统之前先被干净的停止。 只有那些需要在系统启动的早期就必须启动的服务,以及那些必须在关机动作的结尾才能停止的服务才需要设置 DefaultDependencies=false 。 systemd.exec(5) 与 systemd.resource-control(5) 中的某些资源限制选项也会自动隐含的添加一些其他的依赖关系。
- 从同一个模版实例化出来的所有服务单元(单元名称中带有 "
@" 字符), 默认全部属于与模版同名的同一个 slice 单元。 该同名 slice 一般在系统关机时,与所有模版实例一起停止。 如果你不希望像上面这样,那么可以在模版单元中明确设置DefaultDependencies=no, 并且:要么在该模版文件中明确定义特定的 slice 单元(同样也要明确设置DefaultDependencies=no)、 要么在该模版文件中明确设置Slice=system.slice(或其他合适的 slice)。
[Service]小节选项
每个服务单元文件都必须包含一个"[Service]"小节。由于此小节中的许多选项也同时适用于其他类型的单元, 所以本手册仅记录了专用于服务单元的选项。其他共享的选项参见 systemd.exec(5) 与 systemd.kill(5) 手册。
Type=
- 设置进程的启动类型,必须是下列值之一:simple, forking, oneshot, dbus, notify, idle 之一。
- 如果设为"simple"(设置了 ExecStart= 但未设置 BusName= 时的默认值),那么表示 ExecStart= 所设定的进程就是该服务的主进程。 如果此进程需要为其他进程提供服务,那么必须在该进程启动之前先建立好通信渠道(例如套接字),以加快后继单元的启动速度。
- "dbus"(设置了 ExecStart= 与 BusName= 时的默认值)与"simple"类似,不同之处在于该进程需要在 D-Bus 上获得一个由 BusName= 指定的名称。 systemd 将会在启动后继单元之前,首先确保该进程已经成功的获取了指定的 D-Bus 名称。设置为此类型相当于隐含的依赖于 dbus.socket 单元。
- "oneshot"(未设置 ExecStart= 时的默认值)与"simple"类似,不同之处在于该进程必须在 systemd 启动后继单元之前退出。 此种类型通常需要设置 RemainAfterExit= 选项。
- 如果设为"forking",那么表示 ExecStart= 所设定的进程将会在启动过程中使用 fork() 系统调用。这是传统UNIX守护进程的经典做法。 也就是当所有的通信渠道都已建好、启动亦已成功之后,父进程将会退出,而子进程将作为该服务的主进程继续运行。 对于此种进程,建议同时设置 PIDFile= 选项,以帮助 systemd 准确定位该服务的主进程,进而加快后继单元的启动速度。
- "notify"与"simple"类似,不同之处在于该进程将会在启动完成之后通过 sd_notify(3) 之类的接口发送一个通知消息。 systemd 将会在启动后继单元之前,首先确保该进程已经成功的发送了这个消息。 如果设置为此类型,那么 NotifyAccess= 将只能设置为"all"或者"main"(默认)。 注意,目前 Type=notify 尚不能在 PrivateNetwork=yes 的情况下正常工作。
- "idle"与"simple"类似,不同之处在于该进程将会被延迟到所有的操作都完成之后再执行。 这样可以避免控制台上的状态信息与 shell 脚本的输出混杂在一起。
RemainAfterExit=
- 可设为"yes"或"no"(默认值),表示当该服务的所有进程全部退出之后,是否依然将此服务视为活动(active)状态。
GuessMainPID=
- 可设为"yes"(默认值)或"no",表示在无法明确定位该服务的主进程的情况下,systemd 是否应该猜测主进程的PID(可能不正确)。 该选项仅在设置了 Type=forking 但未设置 PIDFile= 的情况下有意义。如果PID猜测错误,那么该服务的失败检测与自动重启功能将失效。
PIDFile=
- 守护进程的PID文件,必须是绝对路径。强烈建议在 Type=forking 的情况下明确设置此选项。 systemd 将会在此服务启动后从此文件中读取主守护进程的PID 。systemd 不会写入此文件,但会在此服务停止后删除它(若存在)。
BusName=
- 设置与此服务通信所使用的 D-Bus 名称。在 Type=dbus 的情况下必须明确设置此选项。
BusPolicy=
- 如果设置了此项,那么 systemd 将会创建一个自定义的kdbus端点(endpoint),并将其安装为该服务默认的总线节点(bus node)。 这个自定义的端点可以拥有它自己的策略规则。端点的名称就是其所服务的单元的名称。 端点的节点(node)将被绑定挂载到默认的总线节点的位置,这样该服务就只能通过它自己的端点访问总线。 注意,自定义端点的默认策略是'拒绝所有',因此,你必须在 BusPolicy= 中明确的添加必要的允许策略。 这个选项的值由两部分组成:总线名+访问级别,中间以空格分隔。 访问级别必须是 see, talk, own 之一,并且 talk 隐含了 see ,而 own 隐含了 talk 与 see 。 如果对同一个总线名称多次指定了访问级别,那么将以拥有最大权限的那个为准。 例如: BusPolicy=org.freedesktop.systemd1 talk BusPolicy=org.foo.bar see 该选项仅在内核开启了kdbus(即将并入官方内核)支持的情况下有意义。
ExecStart=
- 在启动该服务时需要执行的命令行(命令+参数)。有关命令行的更多细节可参见后文的"命令行"小节。 仅在设置了 Type=oneshot 的情况下,才可以设置任意个命令行(包括零个),否则必须且只能设置一个命令行。 多个命令行既可以在同一个 ExecStart= 中设置,也可以通过设置多个 ExecStart= 来达到相同的效果。 如果设为一个空字符串,那么先前设置的所有命令行都将被清空。 如果不设置任何 ExecStart= 指令,那么必须确保设置了 RemainAfterExit=yes 指令。 命令行必须以一个绝对路径表示的可执行文件开始,并且其后的那些参数将依次作为"argv[1] argv[2] ..."传递给被执行的进程。 如果在绝对路径前加上可选的"@"前缀,那么其后的那些参数将依次作为"argv[0] argv[1] argv[2] ..."传递给被执行的进程。 如果在绝对路径前加上可选的"-"前缀,那么即使该进程以失败状态(例如非零的返回值或者出现异常)退出,也会被视为成功退出。 可以同时使用"-"与"@"前缀,且顺序任意。 如果设置了多个命令行,那么这些命令行将以其在单元文件中出现的顺序依次执行。 如果某个无"-"前缀的命令行执行失败,那么剩余的命令行将不会被执行,同时该单元将变为失败(failed)状态。 当未设置 Type=forking 时,这里设置的命令行所启动的进程将被视为该服务的主守护进程。
ExecStartPre=, ExecStartPost=
- 设置在执行 ExecStart= 之前/后执行的命令行。语法规则与 ExecStart= 完全相同。 如果设置了多个命令行,那么这些命令行将以其在单元文件中出现的顺序依次执行。 如果某个无"-"前缀的命令行执行失败,那么剩余的命令行将不会被执行,同时该单元将变为失败(failed)状态。 仅在所有无"-"前缀的 ExecStartPre= 命令全部执行成功的前提下,才会继续执行 ExecStart= 命令。 ExecStartPost= 命令仅在服务已经被成功启动之后才会运行,判断的标准基于 Type= 选项。 具体说来,对于 Type=simple 或 Type=idle 就是主进程已经成功启动;对于 Type=oneshot 来说就是主进程已经成功退出; 对于 Type=forking 来说就是初始进程已经成功退出;对于 Type=notify 来说就是已经发送了"READY=1"; 对于 Type=dbus 来说就是已经取得了 BusName= 中设置的总线名称。 注意,不可将 ExecStartPre= 用于需要长时间执行的进程。 因为所有由 ExecStartPre= 派生的子进程都会在启动 ExecStart= 服务进程之前被杀死。
ExecReload=
- 这是一个可选的指令,用于设置当该服务被要求重新载入配置时所执行的命令行。语法规则与 ExecStart= 完全相同。 另外,还有一个特殊的环境变量 $MAINPID 可以用于表示主进程的PID,例如可以这样使用: /bin/kill -HUP $MAINPID 注意,像上例那样,通过向守护进程发送复位信号,强制其重新加载配置文件,并不是一个好习惯。 因为这是一个异步操作,所以不适用于需要按照特定顺序重新加载配置文件的服务。 我们强烈建议将 ExecReload= 设置为一个能够确保重新加载配置文件的操作同步完成的命令行。
ExecStop=
- 这是一个可选的指令,用于设置当该服务被要求停止时所执行的命令行。语法规则与 ExecStart= 完全相同。 执行完此处设置的命令行之后,该服务所有剩余的进程将会根据 KillMode= 的设置被杀死(参见 systemd.kill(5) 手册)。 如果未设置此选项,那么当此服务被停止时,该服务的所有进程都将会根据 KillMode= 的设置被立即全部杀死。 与 ExecReload= 一样,也有一个特殊的环境变量 $MAINPID 可以用于表示主进程的PID 一般来说,仅仅设置一个结束服务的命令,而不等待其完成,是不够的。 因为当此处设置的命令执行完之后,剩余的进程会被 SIGKILL 信号立即杀死,这可能会导致数据丢失。 因此,这里设置的命令必须是同步操作,而不能是异步操作。
ExecStopPost=
- 这是一个可选的指令,用于设置该服务停止之后所执行的命令行。语法规则与 ExecStart= 完全相同。 无论此服务是正常停止,还是异常退出,此处的设置都适用。 RestartSec= 设定在重启服务(Restart=)前暂停多长时间。默认值是100毫秒(100ms)。 如果未指定时间单位,那么将视为以秒为单位。例如设为"20"等价于设为"20s"。
TimeoutStartSec=
- 设定该服务允许的最大启动时长。如果守护进程未能在限定的时长内发出"启动完毕"的信号,那么该服务将被视为启动失败,并会被关闭。 如果未指定时间单位,那么将视为以秒为单位。例如设为"20"等价于设为"20s"。设为"0"则表示永不超时。 当 Type=oneshot 时,默认值为"0",否则默认值等于 DefaultTimeoutStartSec= 的值(参见 systemd-system.conf(5) 手册)。
TimeoutStopSec=
- 设定该服务允许的最大停止时长。如果该服务未能在限定的时长内成功停止,那么将会被强制使用 SIGTERM 信号关闭, 如果依然未能在相同的时长内成功停止,那么将会被强制使用 SIGKILL 信号关闭(参见 systemd.kill(5) 手册中的 KillMode= 选项)。 如果未指定时间单位,那么将视为以秒为单位。例如设为"20"等价于设为"20s"。设为"0"则表示永不超时。 默认值等于 DefaultTimeoutStartSec= 的值(参见 systemd-system.conf(5) 手册)。
TimeoutSec=
- 一个同时设置 TimeoutStartSec= 与 TimeoutStopSec= 的快捷方式。
WatchdogSec=
设置该服务的看门狗(watchdog)的超时时长。看门狗将在服务成功启动之后被激活。 该服务在运行过程中必须周期性的以"WATCHDOG=1"("keep-alive ping")调用 sd_notify(3) 函数。 如果在两次调用之间的时间间隔大于这里设定的值,那么该服务将被视为失败(failed)状态,并会被强制使用 SIGABRT 信号关闭。 通过将 Restart= 设为"on-failure"或"always"可以实现在失败状态下的自动重启该服务。 这里设置的值将会通过 WATCHDOG_USEC 环境变量传递给守护进程,这样就允许那些支持看门狗的服务自动启用"keep-alive ping"。 如果设置了此选项,那么必须将 NotifyAccess= 设为"main"(此种情况下的隐含默认值)或"all"。 如果未指定时间单位,那么将视为以秒为单位。例如设为"20"等价于设为"20s"。默认值"0"表示禁用看门狗功能。
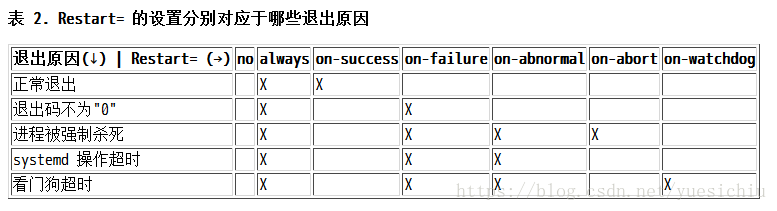
Restart=
- 当服务进程正常退出、异常退出、被杀死、超时的时候,是否重新启动该服务。 "服务进程"是指 ExecStart=, ExecStartPre=, ExecStartPost=, ExecStop=, ExecStopPost=, ExecReload= 中设置的进程。 当进程是由于 systemd 的正常操作(例如 systemctl stop|restart)而被停止时,该服务不会被重新启动。 "超时"可以是看门狗的"keep-alive ping"超时,也可以是 systemctl start|reload|stop 操作超时。
- 该选项可以取下列值之一:no, on-success, on-failure, on-abnormal, on-watchdog, on-abort, always "no"(默认值)表示不会被重启。"always"表示会被无条件的重启。 "on-success"表示仅在服务进程正常退出时重启,所谓"正常退出"是指: 退出码为"0",或者进程收到 SIGHUP, SIGINT, SIGTERM, SIGPIPE 信号并且退出码符合 SuccessExitStatus= 的设置。 "on-failure"表示仅在服务进程异常退出时重启,所谓"异常退出"是指: 退出码不为"0",或者进程被强制杀死(包括"core dump"以及收到 SIGHUP, SIGINT, SIGTERM, SIGPIPE 之外的其他信号), 或者进程由于看门狗或者 systemd 的操作超时而被杀死。 对于 on-failure, on-abnormal, on-abort, on-watchdog 的分别适用于哪种异常退出,见下表:
- 注意如下两个例外情况: (1) RestartPreventExitStatus= 中列出的退出码或者信号永远不会导致该服务被重启。 (2) RestartForceExitStatus= 中列出的退出码或者信号将会无条件的导致该服务被重启。 对于需要长期持续运行的守护进程,推荐设为"on-failure"以增强可用性。 对于自身可以自主选择何时退出的服务,推荐设为"on-abnormal"。
SuccessExitStatus=
- 额外定义附加的进程"正常退出"状态。可以设为一系列以空格分隔的数字退出码或者信号名称,例如: SuccessExitStatus=1 2 8 SIGKILL 表示当进程的退出码是 1, 2, 8 或被 SIGKILL 信号终止时,都可以视为"正常退出"。 注意,退出码"0"以及 SIGHUP, SIGINT, SIGTERM, SIGPIPE 信号是标准的"正常退出",不需要在此特别定义。 注意,如果进程拥有自定义的信号处理器,并且在收到信号后通过调用 _exit(2) 退出,那么有关信号的信息就会丢失。 在这种情况下,进程必须自己完成清理工作并使用相同的信号自杀。参见 Proper handling of SIGINT/SIGQUIT — How to be a proper program 如果多次使用此选项,那么最终的结果将是多个列表的合集。如果将此项设为空,那么先前设置的列表将被清空。
RestartPreventExitStatus=
- 可以设为一系列以空格分隔的数字退出码或者信号名称,当进程的退出码或收到的信号与此处的设置匹配时, 该服务将无条件的禁止重新启动(无视 Restart= 的设置)。例如: RestartPreventExitStatus=1 6 SIGABRT 表示退出码 1, 2, 8 与 SIGKILL 信号将不会导致该服务被重启。 默认值为空,表示完全遵守 Restart= 的设置。
- 如果多次使用此选项,那么最终的结果将是多个列表的合集。如果将此项设为空,那么先前设置的列表将被清空。 RestartForceExitStatus= 可以设为一系列以空格分隔的数字退出码或者信号名称,当进程的退出码或收到的信号与此处的设置匹配时, 该服务将无条件的被重新启动(无视 Restart= 的设置)。 默认值为空,表示完全遵守 Restart= 的设置。 如果多次使用此选项,那么最终的结果将是多个列表的合集。如果将此项设为空,那么先前设置的列表将被清空。
PermissionsStartOnly=
- 设为 true 表示所有与权限相关的执行选项(例如 User= 之类的选项,参见 systemd.exec(5) 手册)仅对 ExecStart= 中的程序有效, 而对 ExecStartPre=, ExecStartPost=, ExecReload=, ExecStop=, ExecStopPost= 中的程序无效。 默认值 false 表示所有与权限相关的执行选项对所有 Exec*= 系列选项中的程序都有效。
RootDirectoryStartOnly=
- 设为 true 表示根目录(参见 systemd.exec(5) 中的 RootDirectory= 选项)仅对 ExecStart= 中的程序有效, 而对 ExecStartPre=, ExecStartPost=, ExecReload=, ExecStop=, ExecStopPost= 中的程序无效。 默认值 false 表示根目录对所有 Exec*= 系列选项中的程序都有效。
NonBlocking=
- 是否为所有通过socket激活传递的文件描述符设置非阻塞标记(O_NONBLOCK)。默认值为 false 设为 true 表示所有大于2的文件描述符(也就是 stdin, stdout, stderr 之外的文件描述符)都将被设置为非阻塞模式。 该选项仅在与 socket 单元(systemd.socket(5))联用的时候才有意义。
NotifyAccess=
- 设置通过sd_notify(3)访问服务状态通知socket的访问模式。 可以设为:none(默认值), main, all 之一。 "none"表示不更新任何守护进程的状态,忽略所有的状态更新消息。 "main"表示仅接受主进程的状态更新消息。 "all"表示接受该服务cgroup内的所有进程的状态更新消息。 当设置了 Type=notify 或 WatchdogSec= 的时候,此选项应该被设为"main"或"all",如果未设置,那么隐含为"main"。
Sockets=
- 设置一个socket单元的名称,表示该服务在启动时应当从它继承socket文件描述符。通常并不需要明确设置此选项, 因为所有与该服务同名(不算后缀)的socket单元的socket文件描述符,都会被自动的传递给派生进程。 注意:(1)同一个socket文件描述符可以被传递给多个不同的进程(服务)。 (2)当socket上有流量进入时,被启动的可能是另一个不同于该服务的其他服务。 换句话说就是:socket单元中的 Service= 所指向的服务单元中的 Sockets= 设置未必要反向指回去。
- 如果多次使用此选项,那么最终的结果将是多个socket单元的合集。如果将此项设为空,那么先前设置的socket单元的列表将被清空。
StartLimitInterval=, StartLimitBurst=
- 限制该服务的启动频率。默认值是每10秒内不得超过5次(StartLimitInterval=10s StartLimitBurst=5)。
- StartLimitInterval= 的默认值等于systemd配置文件中 DefaultStartLimitInterval= 的值,"0"表示取消启动频率限制。
- StartLimitBurst= 的默认值等于systemd配置文件中 DefaultStartLimitBurst= 的值。
- 虽然这两个选项经常与 Restart= 一起使用,但是它们不只限制 Restart= 罗辑所导致的重启,而是限制所有类型的启动(包括手动启动)。 注意,当 Restart=逻辑所导致的重启超出了启动频率限制之后,Restart= 逻辑将会被禁用(也就是不会在下一个时间段内再次尝试重启), 然而,如果该单元随后又被手动重启,那么 Restart= 罗辑将被再次激活。 注意,"systemctl reset-failed ..."命令会清除该服务的重启次数计数器,这通常用于在手动启动之前清除启动限制。
StartLimitAction=
- 设置到达启动频率限制后触发什么动作。 可设为 none(默认值), reboot, reboot-force, reboot-immediate, poweroff, poweroff-force, poweroff-immediate 之一。
- "none"表示除了禁止再次启动之外,不触发任何动作。
- "reboot"表示触发常规的系统重启的动作,相当于执行"systemctl reboot"命令。
- "reboot-force"表示触发系统的强制重启动作(强制杀死所有进程但不会造成文件系统不一致),相当于执行"systemctl reboot -f"命令。
- "reboot-immediate"表示立即调用内核的reboot(2)函数,可能会造成文件系统的数据丢失。
- poweroff, poweroff-force, poweroff-immediate 与对应的"reboot*"项含义类似,不同之处仅仅在于是关机而不是重启。
FailureAction=
- 设置当该服务进入失败(failed)状态时所触发的动作。取值范围与默认值都与 StartLimitAction= 完全相同。
RebootArgument=
- 设置reboot(2)系统调用的可选参数,仅用于 StartLimitAction= 与 FailureAction= 的重启动作。 其作用与"systemctl reboot [arg]"命令中的可选参数[arg]完全相同。
FileDescriptorStoreMax=
- 允许在 systemd 中最多为该服务存储多少个使用sd_pid_notify_with_fds(3)的"FDSTORE=1"消息的文件描述符,默认值为"0"(不存储)。 用于实现重启该服务而不会丢失其状态(前提是该服务将各种状态序列化之后保存在 /run 中,同时将文件描述符交给 systemd 暂存)。 所有被 systemd 暂存的文件描述符都将在该服务重启之后交还给该服务的主进程。 所有被 systemd 暂存的文件描述符都将在遇到如下两种情况时被自动关闭: (1)收到 POLLHUP 或 POLLERR 信号;(2)该服务被彻底停止,并且没有任何剩余的任务队列
USBFunctionDescriptors=
- 设为一个包含 USB FunctionFS 描述符的文件路径,以实现 USB gadget 支持。 仅与配置了 ListenUSBFunction= 的 socket 单元一起使用。该文件的内容将被写入 ep0 文件。 USBFunctionStrings= 设为一个包含 USB FunctionFS 字符串的文件路径。 其行为与上面的 USBFunctionDescriptors= 类似。 参见 systemd.exec(5) 与 systemd.kill(5) 手册页,以获取更多其他选项。
命令行
本小节讲解 ExecStart=, ExecStartPre=, ExecStartPost=, ExecReload=, ExecStop=, ExecStopPost= 选项的命令行解析规则。
仅在设置了 Type=oneshot 的前提下,才可以设置多个命令行,且必须用分号(;)将每个命令行隔开(分号自身用"\;"表示)。
例如: ExecStart=/bin/echo one ; /bin/echo "two two" 每个命令行的内部以空格分隔,每一项的边界都可以用单引号或者双引号进行界定。 第一项是要运行的命令,随后的各项则是命令的参数。 行尾的反斜杠(\)将被视作续行符,这和bash的续行语法类似。例如: ExecStart=/bin/echo / >/dev/null & \; \ /bin/ls 的含义是向 /bin/echo 命令传递五个参数:"/", ">/dev/null", "&", ";", "/bin/ls". 命令行的语法刻意保持了与shell的相似性,但并不相同。 特别的,重定向(<, <<, >, >)、管道(|)、后台运行(&),以及其他下文未明确提及的符号都不被支持。 第一项,要运行的命令,必须使用绝对路径。可以在其中包含空格,但是不可以包含控制字符。 可以在随后的各项命令参数中使用 systemd.unit(5) 中描述的"%"系列特殊符号,但不可用于命令自身(第一项)。 此外,还可以使用C语言风格的转义序列(含义也相同),但只能识别如下符号:\a \b \f \n \r \t \v \\ \" \' \s \xxx \nnn 此外,还支持两种不同的环境变量替换方式("${FOO}"与"$FOO")。
下面的两个例子,将能清除的体现两者的差别:
例(1):
Environment="ONE=one" 'TWO=two two' ExecStart=/bin/echo $ONE $TWO ${TWO}
这将给 /bin/echo 依次传递如下四个参数: "one", "two", "two", "two two"
例(2):
Environment=ONE='one' "TWO='two two' too" THREE=
ExecStart=/bin/echo ${ONE} ${TWO} ${THREE}
ExecStart=/bin/echo $ONE $TWO $THREE
这将给第一个 /bin/echo 依次传递如下三个参数: "'one'", "'two two' too", "" 同时给第二个 /bin/echo 依次传递如下三个参数: "one", "two two", "too" 具体说来就是: "${FOO}"的内容将原封不动的转化为一个单独的命令行参数,无论其中是否包含空格与引号,也无论它是否为空。 "$FOO"的内容将将原封不动的插入命令行中,但对插入内容的解释却遵守一般的命令行解析规则。 此外,如果想要传递美元符号($)自身,则必须使用"$$"。而那些无法在替换时确定内容的变量将被当做空字符串。 注意,不可以在第一项(也就是命令的绝对路径)中使用变量替换。 这里使用的变量必须首先在 Environment= 或 EnvironmentFile= 中定义。 此外,在systemd.exec(5)手册的"派生进程中的环境变量"小节中列出的"静态变量"也可以使用。 例如,$USER 就是一个"静态变量",但是,$TERM 则不是"静态变量"。 注意,这里的命令行并不直接支持shell命令,但是可以通过模仿下面这个变通的方法来实现: ExecStart=/bin/sh -c 'dmesg | tac'
例1. 简单服务
下面的单元文件创建了一个运行 /usr/sbin/foo-daemon 守护进程的服务。未设置的 Type= 等价于默认的 Type=simple 执行 /usr/sbin/foo-daemon 进程之后,systemd 即认为该单元已经启动成功。
[Unit]
Description=Foo
[Service]
ExecStart=/usr/sbin/foo-daemon
[Install]
WantedBy=multi-user.target
注意,/usr/sbin/foo-daemon 必须在启动后持续运行直到服务被停止。 如果该进程只是为了派生守护进程,那么应该使用 Type=forking 因为没有设置 ExecStop= ,所以在停止服务时,systemd 将会直接向该服务启动的所有进程发送 SIGTERM 信号, 若超过指定时间依然存在未被杀死的进程,那么将会继续发送 SIGKILL 信号。详见 systemd.kill(5) 手册。
默认的 Type=simple 并不包含任何通知机制(例如通知"服务已完成初始化")。要想使用通知机制,应该将 Type= 设为其他非默认值。 例如:Type=notify 可用于能够理解 systemd 通知协议的服务; Type=forking 可用于能将自身切换到后台的服务; Type=dbus 可用于能够在完成初始化之后获得一个 D-Bus 名称的单元
例2. 一次性服务
Type=oneshot 用于那些只需要执行一次性动作而不需要持久运行的单元,例如文件系统检查或者清理临时文件。 此类单元,将会在启动后一直等待指定的动作完成,然后再回到停止状态。下面是一个执行清理动作的单元:
[Unit]
Description=Cleanup old Foo data
[Service]
Type=oneshot ExecStart=/usr/sbin/foo-cleanup
[Install]
WantedBy=multi-user.target
注意,在 /usr/sbin/foo-cleanup 执行结束前,该服务一直处于'正在启动中'的状态,而一旦执行结束, 该服务又立即变为'停止'状态,也就是说,对于 Type=oneshot 类型的服务,不存在'活动'状态。 这意味着,如果再一次启动该服务,将会再一次执行该服务定义的动作。 注意,在时间顺序上晚于该服务的单元,将会一直等到该服务变成'停止'状态后,才会开始启动。
Type=oneshot 是唯一可以设置多个 ExecStart= 的服务类型。多个 ExecStart= 指令将按照它们出现的顺序依次执行, 一旦遇到错误,就会立即停止,不再继续执行,同时该服务也将进入'失败'状态。
例3. 可停止的一次性服务
有时候,单元需要执行一个程序以完成某个设置(启动),然后又需要再执行另一个程序以撤消先前的设置(停止), 而在设置持续有效的时段中,该单元应该视为处于'活动'状态,但实际上并无任何程序在持续运行。 网络配置服务就是一个典型的例子。此外,只能启动一次(不可多次启动)的一次性服务,也是一个例子。
可以通过设置 RemainAfterExit=yes 来满足这种需求。 在这种情况下,systemd 将会在启动成功后将该单元视为处于'活动'状态(而不是'停止'状态)。 RemainAfterExit=yes 虽然可以用于所有 Type= 类型,但是主要用于 Type=oneshot 和 Type=simple 类型。 对于 Type=oneshot 类型,systemd 一直等到服务启动成功之后,才会将该服务置于'活动'状态。 所以,依赖于该服务的其他单元必须等待该服务启动成功之后,才能启动。 但是对于 Type=simple 类型,依赖于该服务的其他单元无需等待,将会和该服务同时并行启动。
下面的类似展示了一个简单的静态防火墙服务(simple-firewall.service):
[Unit]
Description=Simple firewall
[Service]
Type=oneshot
RemainAfterExit=yes
ExecStart=/usr/local/sbin/simple-firewall-start
ExecStop=/usr/local/sbin/simple-firewall-stop
[Install]
WantedBy=multi-user.target
因为服务启动成功后一直处于'活动'状态,所以再次执行"systemctl start simple-firewall.service"命令不会有任何效果。
例4. 传统的服务
多数传统的守护进程(服务)在启动时会转入后台运行。systemd 通过 Type=forking 来支持这种工作方式。 对于 Type=forking 类型的服务,如果最初启动的进程尚未退出,那么该单元将依然处于'正在初始化中'状态。 当最初的进程成功退出,并且至少有一个进程仍然在运行(并且 RemainAfterExit=no),该服务才被视为处于'活动'状态。
对于单进程的传统服务,当最初的进程成功退出后,将会只剩单独一个进程仍然在持续运行, systemd 将会把这个唯一剩余的进程视为该服务的主进程。 仅在这种情况下,才将可以在 ExecReload=, ExecStop= ... 之类的选项中使用 $MAINPID 变量。 对于多进程的传统服务,当最初的进程成功退出后,将会剩余多个进程在持续运行, 因此,systemd 无法确定哪一个进程才是该服务的主进程。在这种情况下,不可以使用 $MAINPID 变量。
然而,如果主进程会创建传统的PID文件,那么应该将 PIDFile= 设为此PID文件的绝对路径, 以帮助 systemd 从该PID文件中读取主进程的PID,从而帮助确定该服务的主进程。 注意,守护进程必须在完成初始化之前写入PID文件,否则可能会导致 systemd 读取失败(读取时文件不存在)。
下面是一个单进程传统服务的示例:
[Unit]
Description=Some simple daemon
[Service]
Type=forking
ExecStart=/usr/sbin/my-simple-daemon -d
[Install]
WantedBy=multi-user.target
参见 systemd.kill(5) 以了解如何结束服务进程。
例5. D-Bus 服务
对于需要在 D-Bus 系统总线上注册一个名字的服务,应该使用 Type=dbus 并且设置相应的 BusName= 值。 该服务不可以派生任何子进程。一旦从 D-Bus 系统总线成功获取所需的名字,该服务即被视为初始化成功。
下面是一个典型的 D-Bus 服务:
[Unit]
Description=Simple DBus service
[Service]
Type=dbus
BusName=org.example.simple-dbus-service
ExecStart=/usr/sbin/simple-dbus-service
[Install]
WantedBy=multi-user.target
对于用于 D-Bus 激活的服务来说,不可以包含"[Install]"小节, 而是应该在对应的 D-Bus service 文件中设置 SystemdService= 选项, 例如(/usr/share/dbus-1/system-services/org.example.simple-dbus-service.service):
[D-BUS Service]
Name=org.example.simple-dbus-service
Exec=/usr/sbin/simple-dbus-service
User=root
SystemdService=simple-dbus-service.service
参见system-kill手册以了解如何结束服务。
例6. 能够通知初始化已完成的服务
Type=simple 类型的服务非常容易编写,但是无法将'初始化已完成'的消息及时通知给 systemd 是一个重大缺陷。 Type=notify 可以弥补该缺陷,它支持将'初始化已完成'的消息及时通知给 systemd。
下面是一个典型的例子:
[Unit]
Description=Simple notifying service
[Service]
Type=notify
ExecStart=/usr/sbin/simple-notifying-service
[Install]
WantedBy=multi-user.target
注意,该守护进程必须支持 systemd 通知协议,否则 systemd 将会认为该服务一直处于'正在启动中',并在超时后将其杀死。 关于如何支持该通知协议,参见 sd_notify(3) 手册页。 参见 systemd.kill(5) 手册以了解如何结束服务。