毕设作品:基于机器视觉的游戏辅助设计--别踩白块外挂设计(2)
好久没有跟新了,之前有网友在催我,怎么还不跟新
之前比较忙,没怎么有空写这些,今天整理一下吧.
先附上我的毕设论文word ,和答辩ppt,还有源代码
毕业论文: https://download.csdn.net/download/a897180673/10913853
答辩ppt(ppt不是最新版本的了,好像删除了): https://download.csdn.net/download/a897180673/10913855
代码项目的github地址:
arduino代码:https://github.com/897180673/arduino-42stepper-motor
pc端代码:https://github.com/897180673/Opencv-DoNotStepOnTheWhitePieces
需要注意下的就是pc端代码不是上来就直接运行的,有些参数还是要微调下,不过当你了解整个过程了,其实不是难事.
先列一下需要购买的硬件吧
1.arduino uno *2

找了好久才找到这个,莫非淘宝上没有国产的arduino uno 卖了?
2.Ch340土豪金模块*1

3.zigbee 模块*3

4.A4988*2

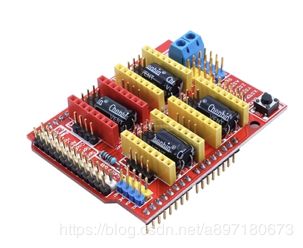
5.cnc shieldv3*2
6.电容笔*4

7.usb摄像头*1

8.L298N*1

9.42步进电机*4

10.ipad*1

打个小广告,我做毕设的这个ipad 也用不到了,原价600闲鱼买的,想买的可以私聊,400左右闲鱼出了,哈哈
这些硬件都是需要连接的,连接好了代码在git仓库里面,烧录进去 就ok
设备已经给学弟参加电赛拆掉了,具体的接线没办给大家拍照了,不过没关系,当你会了之后,简单的接线不算什么
过程在word 里面都有,但是word 里面有很多的废话,什么研究意义,研究目的之类的,看看就好,都是格式要求凑字数的.
大体的讲一讲整个硬件连接吧
上面这个就是大体的硬件连接方式
但是仅仅有这些还不够.
**
所以我强烈建议大家先把每个模块都过一遍手再根据上面的步骤接线
**
具体的如下:
1.zigbbe模块的使用
准备3个zigbee 模块+3个arduino ,arduino 模块和zigbee 串口连接,1个zigbee做发送者,2个zigbee做接收者,发送者发送消息,接收者能够接收到
2.熟悉arduino 的串口,并了解ch340串口的使用
3.熟悉一下42步进电机,并且能够用cnc shieldv3+arduino+ A4988 把42步进电机驱动起来.代码可以参考我github的arduino 的代码
差不多就这些了吧.
最后上一个处理过程的图吧
整个过程大致如下:
1.摄像头采集图像传送到pc
2.pc上 用opencv 对图像进行处理
3.pc处理的结果通过ch340发送到zigbbe,zigbbe再发给连接arduino 的zigbee
4.arduino接收到后根据相应的结果驱动42步进电机,就完成了敲击的动作