Proteus8.9 VSM Studio WINAVR编译器仿真ATmega16系列a18_正反转可控步进电机
*本文及代码参阅彭伟《单片机C语言程序设计实训100例》
一,打开文件(可以随文下载放置在文档中打开)。(如下图1所示)

图1
二,调整原理图大小,适合可视,另存工程文件。(如下图2,3,4所示)

图2

图3
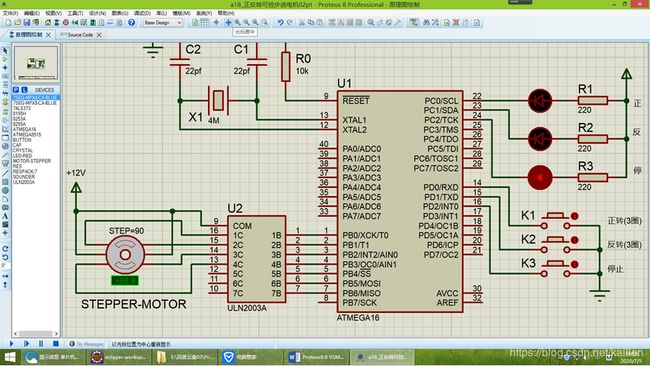
图4
三,点击Source Code标签。(如下图5所示)

图5
四,编辑main.c Proteus8.9 VSM Studio WINAVR编译器仿真ATmega16系列a18_正反转可控步进电机 (如下图6所示)

图6
五,Main.c 代码:
//-----------------------------------------------------------------
// 名称: 正反转可控的步进电机
//-----------------------------------------------------------------
// 说明: 本例运行过程,按下K1电机正转3圈,按下K2反转3圈,
// 按下K3时停止.在进行相应操作时,对应LED将被点亮.
//
//-----------------------------------------------------------------
#include “myfunc01.h”
//-----------------------------------------------------------------
// 主程序
//-----------------------------------------------------------------
int main()
{
INT8U r= 3;
DDRB= 0xFF; PORTB= FFW[0];
DDRC= 0xFF; PORTC= 0xFF;
DDRD= 0x00; PORTD= 0xFF;
while(1) {
if(K1_DOWN()) {
while(K1_DOWN());
PORTC= 0xFE;
STEP_MOTOR_RUN(0, r);
}
if(K2_DOWN()) {
while(K2_DOWN());
PORTC= 0xFD;
STEP_MOTOR_RUN(1, r);
}
PORTC= 0xFB;
}
}
Myfunc01.h
//******************************************************************************************
#ifndef MYFUNC01_H
#define MYFUNC01_H
//#define F_CPU 2000000UL
#include
#include
#include
#define INT8U unsigned char
#define INT16U unsigned int
//本例四相步进电机工作于八拍方式
//正转励磁序列为A->AB->B->BC->C->CD->D->DA
static INT8U FFW[]= { 0x01, 0x03, 0x02, 0x06, 0x04, 0x0C, 0x08, 0x09 };
//反转励磁序列为A->AD->D->CD->C->BC->B->AB
static INT8U REV[]= { 0x01, 0x09, 0x08, 0x0C, 0x04, 0x06, 0x02, 0x03 };
//按键定义
#define K1_DOWN() ((PIND & _BV(PD0))== 0x00)
#define K2_DOWN() ((PIND & _BV(PD1))== 0x00)
#define KX_DOWN() (PIND != 0xFF)
void STEP_MOTOR_RUN(INT8U Direction,INT8U n);
#endif
六,点击构建工程按钮,编译工程。(如下图7所示)
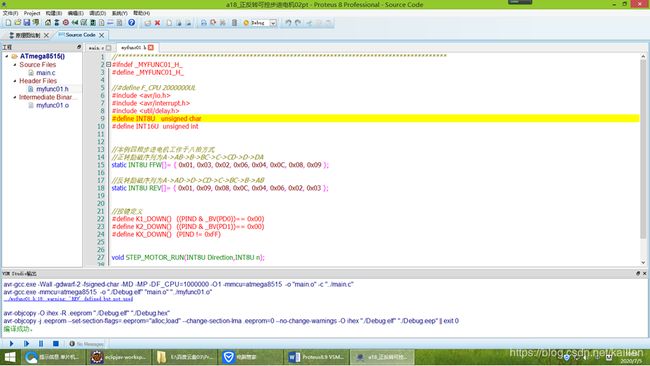
图7
七,点击窗口左下方仿真按钮,可见虚拟步进电机运行。 (如下图8,9,10所示)
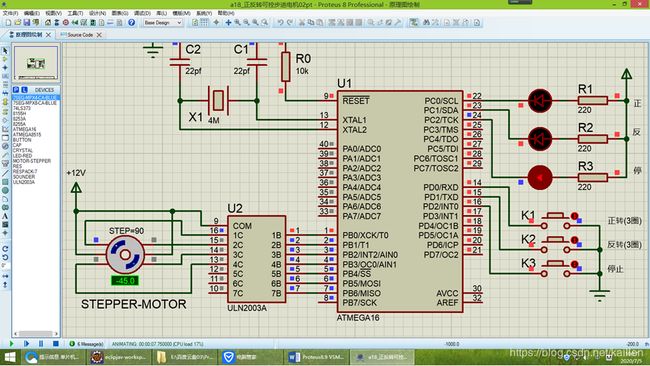
图8
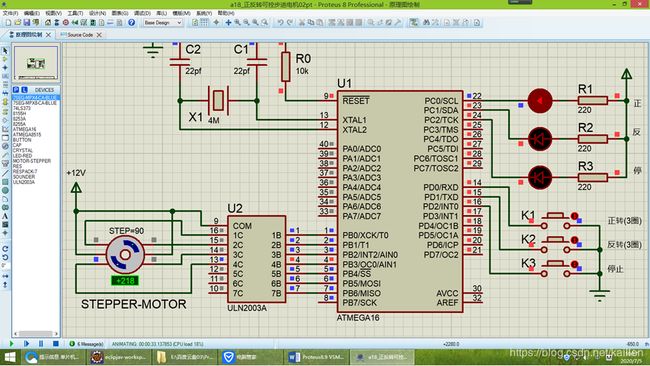
图9

图10
八,选择release,点击构建工程按钮,编译工程生成Hex文件。(如下图11所示)
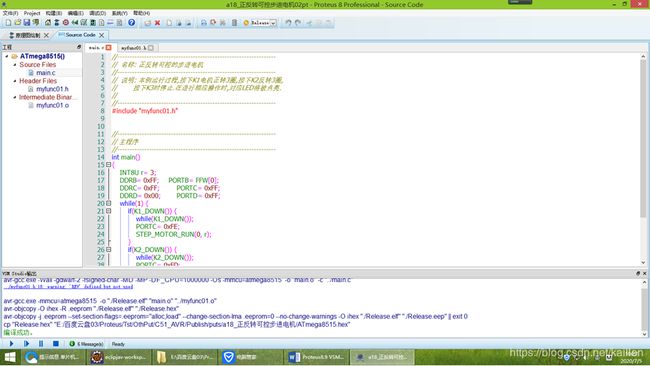
图11
附件下载:https://download.csdn.net/download/kaillen/12578496
Proteus8.9 SP2下载:https://download.csdn.net/download/kaillen/12459968
附件Proteus8.9 VSM Studio WINAVR编译器仿真ATmega16系列a18_正反转可控步进电机在已安装Proteus8.9的计算机文件夹中打开即可
需要进一步了解,请加入QQ群:976235464