超强平衡机器人,走钢丝、玩忍者步伐,还可以做瑜伽动作,不受干扰的那种 | IEEE 2020...
白交 发自 凹非寺
量子位 报道 | 公众号 QbitAI
如果做这样一个动作——单腿单臂支撑式,你可以维持多久?
这个机器人就可以做很久,还是不受打扰的那种。
任凭别人怎么晃它,它都丝毫不为所动,依然能够保持平衡。
甚至,还可以走钢丝,玩「忍者」步伐……
6cm宽的桥,这个机器人的脚直径就有4cm。
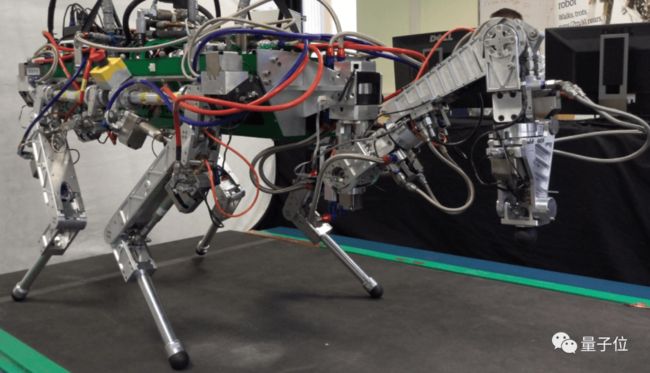
最近,一个名为「Dynamic Legged Systems Lab」(DLS)研发了一款有着超强平衡力的机器人HyQ。
一个90kg的机器人可以走直线,做瑜伽,甚至还可以在6cm宽的木条上行走,这样的平衡力是如何做到的呢?
超强平衡力是如何实现的?
机器人的腿部系统能够穿过「高度受限的环境」的能力,比如穿过极窄的模板,很大部分取决于运动和平衡控制器的性能。
基于此,这个团队就研发了一款控制器,来实现机器人的超强平衡力。
其控制器原理发布在「Line Walking and Balancing for Legged Robots with Point Feet」这篇论文里。目前已被IEEE 2020收录。
首先,设置一个仿真虚拟模型——低维虚拟模型(2-DoF),它对应于摆的两个自由度。
这样设置的目标有两个,了解理想条件下平衡控制器的性能,以及控制器对误测和外部干扰的敏感性。
研究团队共设置了三个仿真测试,分别是接受「恒定」的外部干扰、机器人沿着指定路径行走、「忍者」行走(The Ninja Walk)。
然后将相同的控制器用于真实的机器人上,模拟的运动模型也就映射到了机器人身上了。
通过映射,可以在摆式空间中应用控制器,并将其输出转换为实际机器人的信号。

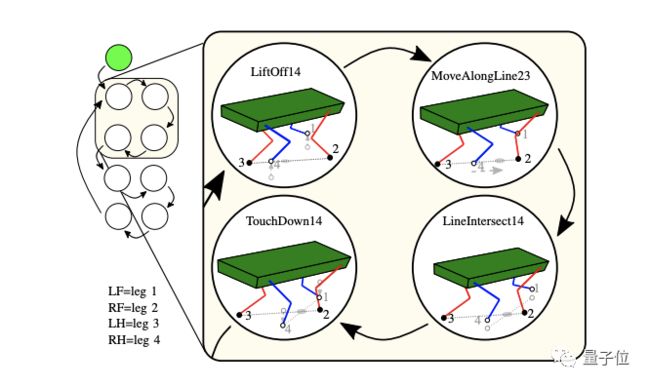
在行走时,机器人主要利用对角线脚对的转换实现平衡。
机器人所有的动态变换都是通过RobCoGen生成的。
最终发现,对于扭矩控制的机器人来说,准确的扭矩测量是很重要的,而平衡控制器会产生低扭矩指令。
背后的团队
The Dynamic Legged Systems (DLS)实验室,听到它的名字就知道,它主要研发高性能、多功能的「腿部机器人」。
这家实验室首席研究员是Claudio Semini,毕业于「苏黎世联邦理工学院」的电气工程和信息技术专业,还是IEEE RAS机器人机制与设计技术委员会的联合创始人兼主席。

目前,该实验室主要有五款机器人,除了上述的HyQ外,还有HyQReal、HyQ2Max、MiniHyQ、HyQCentaur。
其中,液压四足机器人HyQReal是他们实验室的旗舰产品。

它长约1.33 m,高90cm,虽然看起来挺笨重的,但是能跑、能跳、还能在崎岖的地形上行走,可以智能遥控。
这样看,是不是觉得很像波士顿动力机器狗?
这个机器人可能要比那只狗的动力更强,因为它曾经可是拉动过一架小型客机,还拉动到了10米以上。
还有一个酷似马的机器人HyQCentaur,可以用于清除障碍物、抓取物品、救援等任务,看起来依然有些笨重。
你觉得这家实验室的机器人怎么样?对了,还有最初那个问题,那个瑜伽姿势你能支撑多久?
论文地址:
https://arxiv.org/abs/2007.01087
YouTube地址:
https://www.youtube.com/watch?v=Cun1OBJXsUo
实验室网站:
https://dls.iit.it/
本文系网易新闻•网易号特色内容激励计划签约账号【量子位】原创内容,未经账号授权,禁止随意转载。
— 完 —
报名 | 四场直播详解AI芯片所有知识点
7月8日—7月11日期间,燧原科技资深产品专家和软件架构师将为大家分别详细讲解:
高端人工智能训练芯片的发展趋势
剖析软件全栈的技术难点
人工智能训练芯片在云计算中所面临的挑战和机遇
四场直播将讲透所有的芯片知识点,欢迎扫码报名~~


量子位 QbitAI · 头条号签约作者
վ'ᴗ' ի 追踪AI技术和产品新动态
喜欢就点「在看」吧 !