变化检测quick-start
README
数据集是采用2019年遥感图像稀疏表征与智能分析竞赛中的变化检测数据集,原数据有四个通道,本文只是做一个demo,所以一切从简,代码放在了 https://github.com/CarryHJR/remote-sense-quickstart
感谢star
数据集可视化
from libtiff import TIFF
import matplotlib.pyplot as plt
from skimage.transform import match_histograms
import numpy as np
def normalize(x):
return np.array((x - np.min(x)) / (np.max(x) - np.min(x)))
root = '/home/yons/data/change-detection/rssrai2019_change_detection/train/train'
import glob
from libtiff import TIFF
from skimage.transform import match_histograms
image_path_list_2018 = glob.glob(root+'/img_2018'+'/*.tif')
image_path_list_2018.sort()
image_path_list_2017 = glob.glob(root+'/img_2017'+'/*.tif')
image_path_list_2017.sort()
image_path_list_mask = glob.glob(root+'/mask'+'/*.tif')
image_path_list_mask.sort()
for idx in range(18):
image1 = TIFF.open(image_path_list_2017[idx], mode='r').read_image()[:, :, [2, 1, 0]]
image2 = TIFF.open(image_path_list_2018[idx], mode='r').read_image()[:, :, [2, 1, 0]]
image2 = match_histograms(image2, image1, multichannel=True)
label = TIFF.open(image_path_list_mask[idx], mode='r').read_image()
label = (label / 255).astype(np.uint8)
fig, axes = plt.subplots(1,3, figsize=(15,5))
plt.subplots_adjust(left=0, bottom=0, right=1, top=1, wspace=0.05, hspace=0)
axes[0].imshow(normalize(image1))
axes[0].axis('off')
axes[1].imshow(normalize(image2))
axes[1].axis('off')
axes[2].imshow(label)
axes[2].axis('off')
plt.show()
效果如下:

定义网络结构
as we know, 一些论文里用siamese网络,个人经过试验感觉效果不理想,还是暴力的unet好用
import torch
from torch import nn
class double_conv(nn.Module):
def __init__(self, in_ch, out_ch):
super(double_conv, self).__init__()
self.conv = nn.Sequential(
nn.Conv2d(in_ch, out_ch, 3, padding=1),
nn.BatchNorm2d(out_ch),
nn.ReLU(inplace=True),
nn.Conv2d(out_ch, out_ch, 3, padding=1),
nn.BatchNorm2d(out_ch),
nn.ReLU(inplace=True)
)
def forward(self, x):
x = self.conv(x)
return x
class up(nn.Module):
def __init__(self, in_ch, out_ch, bilinear=True):
super(up, self).__init__()
self.conv = double_conv(in_ch, out_ch)
def forward(self, x1, x2):
x1 = nn.functional.interpolate(x1, scale_factor=2)
x = torch.cat([x2, x1], dim=1)
x = self.conv(x)
return x
class UNet(nn.Module):
def __init__(self, n_channels, n_classes):
super(UNet, self).__init__()
self.inc = double_conv(n_channels, 64)
self.down1 = nn.Sequential(nn.MaxPool2d(2), double_conv(64, 128))
self.down2 = nn.Sequential(nn.MaxPool2d(2), double_conv(128, 256))
self.down3 = nn.Sequential(nn.MaxPool2d(2), double_conv(256, 512))
self.down4 = nn.Sequential(nn.MaxPool2d(2), double_conv(512, 512))
self.up1 = up(1024, 256)
self.up2 = up(512, 128)
self.up3 = up(256, 64)
self.up4 = up(128, 64)
self.outc = nn.Conv2d(64, n_classes, 1)
def forward(self, x1, x2):
x = torch.cat([x1, x2], dim=1)
x1 = self.inc(x)
x2 = self.down1(x1)
x3 = self.down2(x2)
x4 = self.down3(x3)
x5 = self.down4(x4)
x = self.up1(x5, x4)
x = self.up2(x, x3)
x = self.up3(x, x2)
x = self.up4(x, x1)
x = self.outc(x)
return x
from torchsummary import summary
net = UNet(6,2)
summary(net, input_size=[(3, 960, 960), (3, 960, 960)], batch_size=1, device='cpu')
定义dataset
import itertools
import glob
from libtiff import TIFF
import numpy as np
from torch.utils.data import Dataset
from skimage.transform import match_histograms
import torch
class SctDataset(Dataset):
def __init__(self, root, size=512, slide=256):
image_path_list_2018 = glob.glob(root + '/img_2018' + '/*.tif')
image_path_list_2018.sort()
image_path_list_2017 = glob.glob(root + '/img_2017' + '/*.tif')
image_path_list_2017.sort()
image_path_list_mask = glob.glob(root + '/mask' + '/*.tif')
image_path_list_mask.sort()
self.image_path_list_2018 = image_path_list_2018
self.image_path_list_2017 = image_path_list_2017
self.image_path_list_mask = image_path_list_mask
def __getitem__(self, idx):
image1 = TIFF.open(self.image_path_list_2017[idx], mode='r').read_image()[:, :, [2, 1, 0]].transpose((2, 0, 1))
image2 = TIFF.open(self.image_path_list_2018[idx], mode='r').read_image()[:, :, [2, 1, 0]].transpose((2, 0, 1))
image2 = match_histograms(image2, image1, multichannel=True)
label = TIFF.open(self.image_path_list_mask[idx], mode='r').read_image()
label = (label / 255).astype(np.uint8)
return torch.from_numpy(image1.astype(np.float32)), torch.from_numpy(image2.astype(np.float32)), torch.from_numpy(label).long()
def __len__(self):
return len(self.image_path_list_2018)
from torch.utils.data import DataLoader
test_loader = DataLoader(SctDataset('/home/yons/data/change-detection/rssrai2019_change_detection/train/train'), batch_size=1, shuffle=True, num_workers=1)
test_iter = iter(test_loader)
x1, x2, target = next(test_iter)
print(x1.shape,x2.shape,target.shape)
输出是
torch.Size([1, 3, 960, 960]) torch.Size([1, 3, 960, 960]) torch.Size([1, 960, 960])
和预想中一样,let’s move on.
定义TverskyLoss
最开始用的criterion = nn.CrossEntropyLoss(),误判很严重
然后用的TverskyLoss(alpha=0.1, beta=0.9) 发现偏向于change,最终采用0.3 0.7
import torch
import torch.nn as nn
import torch.nn.functional as F
class TverskyLoss(nn.Module):
def __init__(self, alpha=0.5, beta=0.5, eps=1e-7, size_average=True):
super(TverskyLoss, self).__init__()
self.alpha = alpha
self.beta = beta
self.size_average = size_average
self.eps = eps
def forward(self, logits, true):
"""Computes the Tversky loss [1].
Args:
true: a tensor of shape [B, H, W] or [B, 1, H, W].
logits: a tensor of shape [B, C, H, W]. Corresponds to
the raw output or logits of the model.
alpha: controls the penalty for false positives.
beta: controls the penalty for false negatives.
eps: added to the denominator for numerical stability.
Returns:
tversky_loss: the Tversky loss.
Notes:
alpha = beta = 0.5 => dice coeff
alpha = beta = 1 => tanimoto coeff
alpha + beta = 1 => F beta coeff
References:
[1]: https://arxiv.org/abs/1706.05721
"""
num_classes = logits.shape[1]
if num_classes == 1:
true_1_hot = torch.eye(num_classes + 1)[true.squeeze(1)]
true_1_hot = true_1_hot.permute(0, 3, 1, 2).float()
true_1_hot_f = true_1_hot[:, 0:1, :, :]
true_1_hot_s = true_1_hot[:, 1:2, :, :]
true_1_hot = torch.cat([true_1_hot_s, true_1_hot_f], dim=1)
pos_prob = torch.sigmoid(logits)
neg_prob = 1 - pos_prob
probas = torch.cat([pos_prob, neg_prob], dim=1)
else:
true_1_hot = torch.eye(num_classes)[true.squeeze(1)]
true_1_hot = true_1_hot.permute(0, 3, 1, 2).float()
probas = F.softmax(logits, dim=1)
true_1_hot = true_1_hot.type(logits.type())
dims = (0,) + tuple(range(2, true.ndimension()))
intersection = torch.sum(probas * true_1_hot, dims)
fps = torch.sum(probas * (1 - true_1_hot), dims)
fns = torch.sum((1 - probas) * true_1_hot, dims)
num = intersection
denom = intersection + (self.alpha * fps) + (self.beta * fns)
tversky_loss = (num / (denom + self.eps)).mean()
return (1 - tversky_loss)
criterion = TverskyLoss(alpha=0.3, beta=0.7)
y = net(x1,x2)
loss = criterion(y, target)
print(loss.item())
跑跑训练
from tqdm import tqdm_notebook as tqdm
import torch
train_loader = DataLoader(SctDataset('/home/yons/data/change-detection/rssrai2019_change_detection/train/train'), batch_size=1, shuffle=True, num_workers=1)
val_loader = DataLoader(SctDataset('/home/yons/data/change-detection/rssrai2019_change_detection/val/val'), batch_size=1, shuffle=True, num_workers=1)
print('train: ', len(train_loader))
print('val: ', len(val_loader))
best_loss = 9999
save_dir = '/home/yons/workplace/python/change-detection/log/0.4'
import shutil, os
if not os.path.exists(save_dir):
os.makedirs(save_dir)
else:
shutil.rmtree(save_dir)
os.makedirs(save_dir)
net = UNet(6, 2)
net = net.cuda()
optimizer = torch.optim.SGD(net.parameters(), lr=0.01, momentum=0.9, weight_decay=0.0005)
scheduler = torch.optim.lr_scheduler.MultiStepLR(optimizer, milestones=[3, 8, 15], gamma=0.1)
for epoch in range(20):
net.train()
train_loss = 0
for step, data in tqdm(enumerate(train_loader)):
x1, x2, target = data
x1, x2, target = x1.cuda(), x2.cuda(), target.cuda()
optimizer.zero_grad()
y = net(x1, x2)
loss = criterion(y, target)
loss.backward()
optimizer.step()
train_loss = train_loss + loss.item()
train_loss = train_loss / len(train_loader)
net.eval()
with torch.no_grad():
val_loss = 0
for step, data in tqdm(enumerate(val_loader)):
x1, x2, target = data
x1, x2, target = x1.cuda(), x2.cuda(), target.cuda()
y = net(x1, x2)
loss = criterion(y, target)
val_loss = val_loss + loss.item()
val_loss = val_loss / len(val_loader)
print(epoch, train_loss, val_loss)
if val_loss < best_loss:
best_loss = val_loss
save_path = os.path.join(save_dir, 'best_loss.pth')
state = {
'net': net.state_dict(),
'epoch': epoch,
'loss': best_loss
}
torch.save(state, save_path)
scheduler.step()
最终loss是
train: 0.45967846115430194 | val: 0.39102962613105774
加载保存好的模型
net = UNet(6, 2)
net = net.cuda()
checkpoint = torch.load('/home/yons/workplace/python/change-detection/log/0.4/best_loss.pth')
net.load_state_dict(checkpoint['net'])
print(checkpoint['loss'], checkpoint['epoch'])
预测及可视化
def normalize(x):
return np.array((x - np.min(x)) / (np.max(x) - np.min(x)))
net.eval()
with torch.no_grad():
val_loss = 0
for step, data in tqdm(enumerate(val_loader)):
x1, x2, target = data
x1, x2, target = x1.cuda(), x2.cuda(), target.cuda()
y = net(x1, x2)
loss = criterion(y, target)
val_loss = val_loss + loss.item()
x1 = x1.cpu().numpy()[0].transpose((1,2,0))
x2 = x2.cpu().numpy()[0].transpose((1,2,0))
_, y = torch.max(y, 1)
y = y.cpu().numpy()[0]
target = target.cpu().numpy()[0]
fig, axes = plt.subplots(1,4, figsize=(8,2))
plt.subplots_adjust(left=0, bottom=0, right=1, top=1, wspace=0.1, hspace=0.1)
image1 = TIFF.open(image_path_list_2017[step], mode='r').read_image()[:,:,[2,1,0]]
image2 = TIFF.open(image_path_list_2018[step], mode='r').read_image()[:,:,[2,1,0]]
image2 = match_histograms(image2, image1, multichannel=True)
axes[0].imshow(normalize(image1))
axes[0].axis('off')
axes[1].imshow(normalize(image2))
axes[1].axis('off')
axes[2].imshow(target)
axes[2].axis('off')
axes[3].imshow(y)
axes[3].axis('off')
plt.show()
val_loss = val_loss / len(val_loader)
print(val_loss)
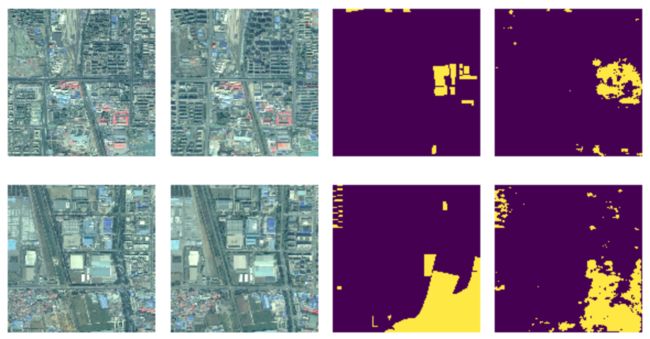
看起来还行,发现可视化的图片路径错了,mask没有问题,不改了,大家参考的时候注意一下.