多普勒微波感应和FMCW微波感应原理以及应用
0. 前言
雷达主要分为多普勒雷达、脉冲雷达、频率调制连续波FMCW雷达。脉冲雷达由于需要贵重的磁体控制脉冲开关,较少使用。多普勒雷达通常只能获得目标速度,而目标距离难以获取。FMCW雷达,
1. 多普勒雷达HB100原理
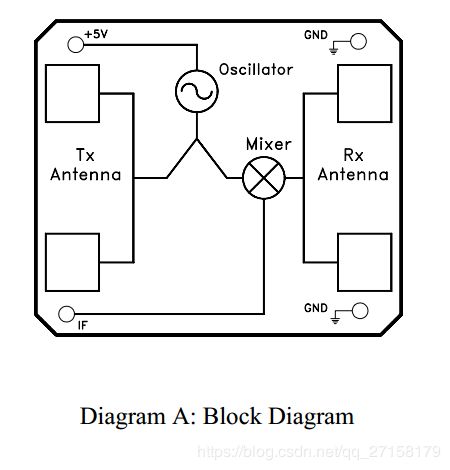
多普勒雷达原理来自多普勒效应。手头上的HB100微波传感器的原理是多普勒测距雷达。规格书上[1]有本模块的方框图。
设发送信号为T(t),则其函数为:
![]()
 是发送信号的频率。多普勒雷达中这个频率一般是个固定值。
是发送信号的频率。多普勒雷达中这个频率一般是个固定值。![]() 是初始相位。
是初始相位。
不计天线增益和信号衰减,接收天线的获得的信号为:
![]()
其中![]() 是发送信号的波长。
是发送信号的波长。![]() 。c是光速,约为3x10^8m/s。v是目标的移动速度。
。c是光速,约为3x10^8m/s。v是目标的移动速度。![]() 是多普勒频移[4]。而d是目标到微波感应器的距离。
是多普勒频移[4]。而d是目标到微波感应器的距离。
Mixer是T(t)和R(t)的相乘。
根据三角函数关系:
![]()
可得:
![]()
采用合适截止频率的低通运放电路,即截止频率在![]() ,可以得到输入到ADC模块的信号:
,可以得到输入到ADC模块的信号:
![]()
公式中G是运放的增益。模块的规格书说明,输出信号电压幅值和![]() 成正比的。
成正比的。
2. HB100的典型应用
规格书[1]有HB100的典型应用,根据此图,在KiCad上可以绘制出原理图。KiCad的原理图和PCB设计文件已经共享到github。https://github.com/xxJian/HB100_Microwave_Demo
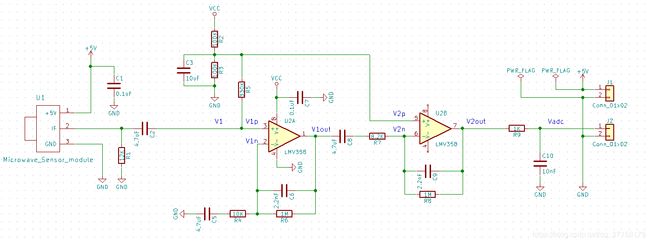
R1作用是假负载。
静态分析:
![]()
![]()
V1out中由于U2A运放对直流信号没有放大作用,同时没移植作用,故VCC增益不变。
![]()
动态分析:
1阶RC电路截止频率计算公式:
![]()
| 电阻 | 电容 | 截止频率 |
| R5+R2//R3 |
C2 |
0.09Hz |
| R4 |
C5 |
3.39Hz |
| R6 |
C6 |
72.34Hz |
| R7 |
C8 |
4.13Hz |
| R8 |
C9 |
72.34Hz |
| R9 |
C10 |
16KHz |
3. FMCW雷达
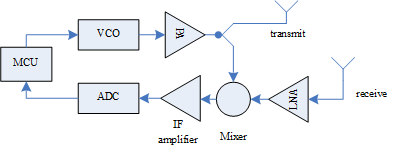
图2. 一款雷达应用的实现框图[5]
MCU是单片机。VCO是压控振荡器,可以通过输入的模拟信号大小而控制输出信号的频率。PA是功率运放。LNA是Low Noise Amplifier的缩写。Mixer把两个信号相乘并输出IF信号。IF amplifier是把IF信号放大,并带有低通滤波的效果。ADC是模拟信号-数字信号转换器。
单发送单接收的FMCW示意图如图3所示。FMCW调制过程中,线性调制信号的上限和下限只差为B,同时这个频率范围有严格规定[2]。24GHz雷达的带宽为200MHz,而77GHz允许有4GHz的带宽范围。
3.1 计算距离
发送信号的频率为ft。fr为接受信号的频率。Td是发送、接收延时。Tc为上升时间。线性调制的斜率为B/Tc。

图3 FMCW示意图
图3中,由相似三角形,可得到以下关系:
![]()
而![]()
发送信号的波形函数(Tc时间内):
![]()
而接收信号的时域函数:
![]()
混频器的输出时域函数(这里就直接频率相减、相位相减):
![]()
通过FFT得到Mix(t)的频率![]() ,再通过计算即可得到距离d。
,再通过计算即可得到距离d。
3.2 计算速度
时间间距为Tc,先后发送两个线性调制脉冲信号,见下图。

发送信号的波形函数(Tc时间内):
![]()
![]()
适当化简:
![]()
那么接收信号的时域函数是:
![]()
![]()
适当化简:
![]()
![]()
混频器输出:
![]()
![]()
将Mix1和Mix2再次进行混频(频率相减、相位相减)
![]()
4. TODO: TI的mm radar
到TI的官网搜mm radar得到iwr1443 mmware radar……个人认为资料比较丰富了。还有教学视频,但我还没看。
参考资料:
资料[1]:https://www.limpkin.fr/public/HB100/HB100_Microwave_Sensor_Application_Note.pdf
资料[2]:Moving from legacy 24 GHz to state-of-the-art 77 GHz radar, http://www.ti.com/lit/wp/spry312/spry312.pdf
资料[3]:MicrowaveNoncontactMotionSensingandAnalysis.pdf
资料[4]:https://www.school-for-champions.com/science/waves_doppler_effect_wavelength_derivations.htm#.W-JGFbiQOO4
资料[5]:http://hforsten.com/third-version-of-homemade-6-ghz-fmcw-radar.html