【学习笔记】零基础入门CV之街道字符识别-模型训练与验证
本章,我们在简单的CNN模型基础上进行模型训练与验证。
1. 学习目标
- 理解验证集的作用,并使用训练集和验证集完成训练
- 学会使用Pytorch环境下的模型读取和加载,并了解调参流程
2. 验证集
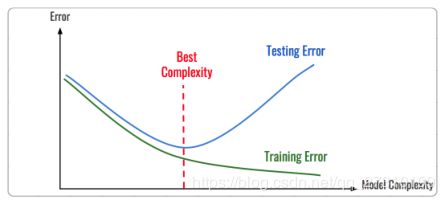
在机器学习模型(特别是深度学习模型)的训练过程中,存在着过拟合与欠拟合的情况。因此模型如果将训练集学的过好,模型就会记住训练样本的细节,导致模型在测试集的泛化效果较差,这种现象称为过拟合(Overfitting)。与过拟合相对应的是欠拟合Underfitting),即模型在训练集上的拟合效果较差。
为了解决这个问题,我们一般会把本地数据划分出一个验证集。训练集、验证集和测试集分别有不同的作用:
- 训练集(Train Set):模型用于训练和调整模型参数;
- 验证集(Validation Set):用来验证模型精度和调整模型超参数;
- 测试集(Test Set):验证模型的泛化能力。
验证集的划分方法一般包括以下几种:
(1) 留出法(Hold-Out)
直接将训练集划分成两部分,新的训练集和验证集。这种划分方式的优点是最为直接简单;缺点是只得到了一份验证集,有可能导致模型在验证集上过拟合。留出法应用场景是数据量比较大的情况。
(2) 交叉验证法(Cross Validation,CV)
将训练集划分成K份,将其中的K-1份作为训练集,剩余的1份作为验证集,循环K训练。这种划分方式是所有的训练集都是验证集,最终模型验证精度是K份平均得到。这种方式的优点是验证集精度比较可靠,训练K次可以得到K个有多样性差异的模型;CV验证的缺点是需要训练K次,不适合数据量很大的情况。
(3)自助采样法(BootStrap)
通过有放回的采样方式得到新的训练集和验证集,每次的训练集和验证集都是有区别的。这种划分方式一般适用于数据量较小的情况。
在本次赛题中已经划分为验证集,所以我们可以直接使用训练集进行训练,并使用验证集进行验证精度。
3. 模型训练与验证
接下来,我们使用Pytorch来完成CNN的训练和验证过程,CNN网络结构与之前的章节中保持一致。我们需要完成的逻辑结构如下:
- 构造训练集和验证集;
- 每轮进行训练和验证,并根据最优验证集精度保存模型。
train_loader = torch.utils.data.DataLoader(
train_dataset,
batch_size=10,
shuffle=True,
num_workers=10,
)
val_loader = torch.utils.data.DataLoader(
val_dataset,
batch_size=10,
shuffle=False,
num_workers=10,
)
model = SVHN_Model1()
criterion = nn.CrossEntropyLoss (size_average=False)
optimizer = torch.optim.Adam(model.parameters(), 0.001)
best_loss = 1000.0
for epoch in range(20):
print('Epoch: ', epoch)
train(train_loader, model, criterion, optimizer, epoch)
val_loss = validate(val_loader, model, criterion)
# 记录下验证集精度
if val_loss < best_loss:
best_loss = val_loss
torch.save(model.state_dict(), './model.pt')
对每个Epoch进行训练:
def train(train_loader, model, criterion, optimizer, epoch):
# 切换模型为训练模式
model.train()
for i, (input, target) in enumerate(train_loader):
c0, c1, c2, c3, c4, c5 = model(data[0])
loss = criterion(c0, data[1][:, 0]) + \
criterion(c1, data[1][:, 1]) + \
criterion(c2, data[1][:, 2]) + \
criterion(c3, data[1][:, 3]) + \
criterion(c4, data[1][:, 4]) + \
criterion(c5, data[1][:, 5])
loss /= 6
optimizer.zero_grad()
loss.backward()
optimizer.step()
对每个Epoch进行验证:
def validate(val_loader, model, criterion):
# 切换模型为预测模型
model.eval()
val_loss = []
# 不记录模型梯度信息
with torch.no_grad():
for i, (input, target) in enumerate(val_loader):
c0, c1, c2, c3, c4, c5 = model(data[0])
loss = criterion(c0, data[1][:, 0]) + \
criterion(c1, data[1][:, 1]) + \
criterion(c2, data[1][:, 2]) + \
criterion(c3, data[1][:, 3]) + \
criterion(c4, data[1][:, 4]) + \
criterion(c5, data[1][:, 5])
loss /= 6
val_loss.append(loss.item())
return np.mean(val_loss)