比较好的Mask R-CNN解读以及代码实现
解读:https://blog.csdn.net/zziahgf/article/details/78730859
https://blog.csdn.net/baobei0112/article/details/79130855
https://zhuanlan.zhihu.com/p/37998710
ROI Align 和 ROI Pooling 的区别:http://blog.leanote.com/post/[email protected]/b5f4f526490b
ROI Align代码:https://github.com/katotetsuro/roi_align/blob/master/roi_align_2d.py
双线性插值:https://blog.csdn.net/sinat_37011812/article/details/81842957
Mask-RCNN代码:https://github.com/facebookresearch/maskrcnn-benchmark
MaskRCNN-Benchmark(Pytorch版本)训练自己的数据以及避坑指南:https://juejin.im/post/5cd0172a518825420068639a
generalized_rcnn.py
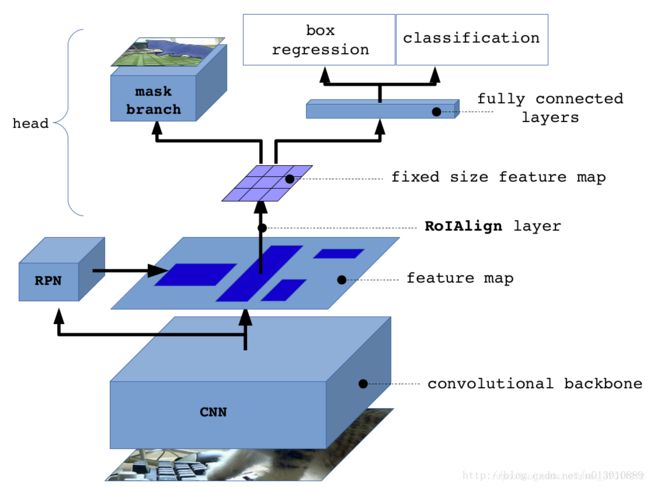
这个构成了整个网络的框架,分三个部分 backbone,rpn以及roi heads
backbone提取特征,rpn生成候选框,roi heads 生成最后的结果
class GeneralizedRCNN(nn.Module):
"""
Main class for Generalized R-CNN. Currently supports boxes and masks.
It consists of three main parts:
- backbone
- rpn
- heads: takes the features + the proposals from the RPN and computes
detections / masks from it.
"""
def __init__(self, cfg):
super(GeneralizedRCNN, self).__init__()
self.backbone = build_backbone(cfg)
self.rpn = build_rpn(cfg, self.backbone.out_channels)
self.roi_heads = build_roi_heads(cfg, self.backbone.out_channels)
def forward(self, images, targets=None):
"""
Arguments:
images (list[Tensor] or ImageList): images to be processed
targets (list[BoxList]): ground-truth boxes present in the image (optional)
Returns:
result (list[BoxList] or dict[Tensor]): the output from the model.
During training, it returns a dict[Tensor] which contains the losses.
During testing, it returns list[BoxList] contains additional fields
like `scores`, `labels` and `mask` (for Mask R-CNN models).
"""
if self.training and targets is None:
raise ValueError("In training mode, targets should be passed")
images = to_image_list(images)
features = self.backbone(images.tensors)
proposals, proposal_losses = self.rpn(images, features, targets)
if self.roi_heads:
x, result, detector_losses = self.roi_heads(features, proposals, targets)
else:
# RPN-only models don't have roi_heads
x = features
result = proposals
detector_losses = {}
if self.training:
losses = {}
losses.update(detector_losses)
losses.update(proposal_losses)
return losses
return resultbackbone.py
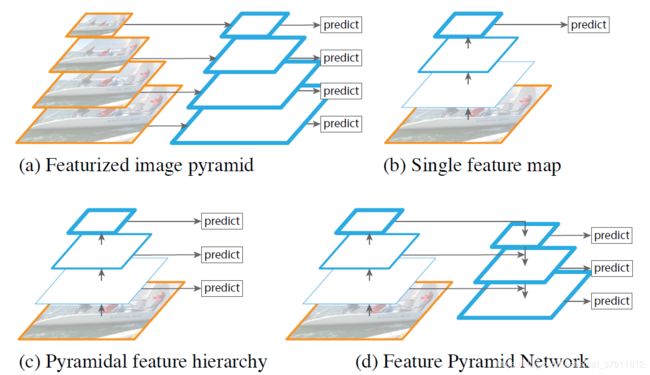
整个提取特征的网路构造,FPN表示 feature pyramid networks
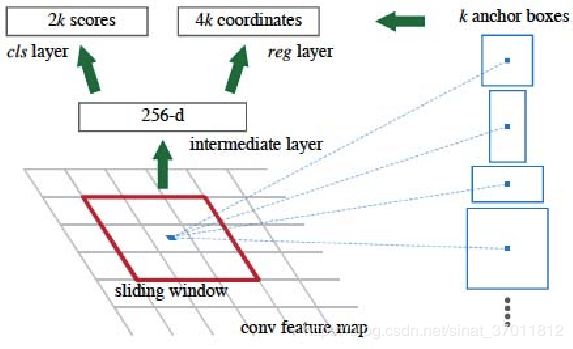
rpn.py
这里构造了region proposal network,计算 rpn输出的objectness 物体置信度以及 anchor box regression 回归候选框的坐标
# Copyright (c) Facebook, Inc. and its affiliates. All Rights Reserved.
import torch
import torch.nn.functional as F
from torch import nn
from maskrcnn_benchmark.modeling import registry
from maskrcnn_benchmark.modeling.box_coder import BoxCoder
from maskrcnn_benchmark.modeling.rpn.retinanet.retinanet import build_retinanet
from .loss import make_rpn_loss_evaluator
from .anchor_generator import make_anchor_generator
from .inference import make_rpn_postprocessor
class RPNHeadConvRegressor(nn.Module):
"""
A simple RPN Head for classification and bbox regression
"""
def __init__(self, cfg, in_channels, num_anchors):
"""
Arguments:
cfg : config
in_channels (int): number of channels of the input feature
num_anchors (int): number of anchors to be predicted
"""
super(RPNHeadConvRegressor, self).__init__()
self.cls_logits = nn.Conv2d(in_channels, num_anchors, kernel_size=1, stride=1)
self.bbox_pred = nn.Conv2d(
in_channels, num_anchors * 4, kernel_size=1, stride=1
)
for l in [self.cls_logits, self.bbox_pred]:
torch.nn.init.normal_(l.weight, std=0.01)
torch.nn.init.constant_(l.bias, 0)
def forward(self, x):
assert isinstance(x, (list, tuple))
logits = [self.cls_logits(y) for y in x]
bbox_reg = [self.bbox_pred(y) for y in x]
return logits, bbox_reg
class RPNHeadFeatureSingleConv(nn.Module):
"""
Adds a simple RPN Head with one conv to extract the feature
"""
def __init__(self, cfg, in_channels):
"""
Arguments:
cfg : config
in_channels (int): number of channels of the input feature
"""
super(RPNHeadFeatureSingleConv, self).__init__()
self.conv = nn.Conv2d(
in_channels, in_channels, kernel_size=3, stride=1, padding=1
)
for l in [self.conv]:
torch.nn.init.normal_(l.weight, std=0.01)
torch.nn.init.constant_(l.bias, 0)
self.out_channels = in_channels
def forward(self, x):
assert isinstance(x, (list, tuple))
x = [F.relu(self.conv(z)) for z in x]
return x
@registry.RPN_HEADS.register("SingleConvRPNHead")
class RPNHead(nn.Module):
"""
Adds a simple RPN Head with classification and regression heads
"""
def __init__(self, cfg, in_channels, num_anchors):
"""
Arguments:
cfg : config
in_channels (int): number of channels of the input feature
num_anchors (int): number of anchors to be predicted
"""
super(RPNHead, self).__init__()
self.conv = nn.Conv2d(
in_channels, in_channels, kernel_size=3, stride=1, padding=1
)
self.cls_logits = nn.Conv2d(in_channels, num_anchors, kernel_size=1, stride=1)
self.bbox_pred = nn.Conv2d(
in_channels, num_anchors * 4, kernel_size=1, stride=1
)
for l in [self.conv, self.cls_logits, self.bbox_pred]:
torch.nn.init.normal_(l.weight, std=0.01)
torch.nn.init.constant_(l.bias, 0)
def forward(self, x):
logits = []
bbox_reg = []
for feature in x:
t = F.relu(self.conv(feature))
logits.append(self.cls_logits(t))
bbox_reg.append(self.bbox_pred(t))
return logits, bbox_reg
class RPNModule(torch.nn.Module):
"""
Module for RPN computation. Takes feature maps from the backbone and RPN
proposals and losses. Works for both FPN and non-FPN.
"""
def __init__(self, cfg, in_channels):
super(RPNModule, self).__init__()
self.cfg = cfg.clone()
anchor_generator = make_anchor_generator(cfg)
rpn_head = registry.RPN_HEADS[cfg.MODEL.RPN.RPN_HEAD]
head = rpn_head(
cfg, in_channels, anchor_generator.num_anchors_per_location()[0]
)
rpn_box_coder = BoxCoder(weights=(1.0, 1.0, 1.0, 1.0))
box_selector_train = make_rpn_postprocessor(cfg, rpn_box_coder, is_train=True)
box_selector_test = make_rpn_postprocessor(cfg, rpn_box_coder, is_train=False)
loss_evaluator = make_rpn_loss_evaluator(cfg, rpn_box_coder)
self.anchor_generator = anchor_generator
self.head = head
self.box_selector_train = box_selector_train
self.box_selector_test = box_selector_test
self.loss_evaluator = loss_evaluator
def forward(self, images, features, targets=None):
"""
Arguments:
images (ImageList): images for which we want to compute the predictions
features (list[Tensor]): features computed from the images that are
used for computing the predictions. Each tensor in the list
correspond to different feature levels
targets (list[BoxList): ground-truth boxes present in the image (optional)
Returns:
boxes (list[BoxList]): the predicted boxes from the RPN, one BoxList per
image.
losses (dict[Tensor]): the losses for the model during training. During
testing, it is an empty dict.
"""
objectness, rpn_box_regression = self.head(features)
anchors = self.anchor_generator(images, features)
if self.training:
return self._forward_train(anchors, objectness, rpn_box_regression, targets)
else:
return self._forward_test(anchors, objectness, rpn_box_regression)
def _forward_train(self, anchors, objectness, rpn_box_regression, targets):
if self.cfg.MODEL.RPN_ONLY:
# When training an RPN-only model, the loss is determined by the
# predicted objectness and rpn_box_regression values and there is
# no need to transform the anchors into predicted boxes; this is an
# optimization that avoids the unnecessary transformation.
boxes = anchors
else:
# For end-to-end models, anchors must be transformed into boxes and
# sampled into a training batch.
with torch.no_grad():
boxes = self.box_selector_train(
anchors, objectness, rpn_box_regression, targets
)
loss_objectness, loss_rpn_box_reg = self.loss_evaluator(
anchors, objectness, rpn_box_regression, targets
)
losses = {
"loss_objectness": loss_objectness,
"loss_rpn_box_reg": loss_rpn_box_reg,
}
return boxes, losses
def _forward_test(self, anchors, objectness, rpn_box_regression):
boxes = self.box_selector_test(anchors, objectness, rpn_box_regression)
if self.cfg.MODEL.RPN_ONLY:
# For end-to-end models, the RPN proposals are an intermediate state
# and don't bother to sort them in decreasing score order. For RPN-only
# models, the proposals are the final output and we return them in
# high-to-low confidence order.
inds = [
box.get_field("objectness").sort(descending=True)[1] for box in boxes
]
boxes = [box[ind] for box, ind in zip(boxes, inds)]
return boxes, {}
def build_rpn(cfg, in_channels):
"""
This gives the gist of it. Not super important because it doesn't change as much
"""
if cfg.MODEL.RETINANET_ON:
return build_retinanet(cfg, in_channels)
return RPNModule(cfg, in_channels)
roi_heads.py
这里是最后的输出层,输出mask or box and objectness
# Copyright (c) Facebook, Inc. and its affiliates. All Rights Reserved.
import torch
from .box_head.box_head import build_roi_box_head
from .mask_head.mask_head import build_roi_mask_head
from .keypoint_head.keypoint_head import build_roi_keypoint_head
class CombinedROIHeads(torch.nn.ModuleDict):
"""
Combines a set of individual heads (for box prediction or masks) into a single
head.
"""
def __init__(self, cfg, heads):
super(CombinedROIHeads, self).__init__(heads)
self.cfg = cfg.clone()
if cfg.MODEL.MASK_ON and cfg.MODEL.ROI_MASK_HEAD.SHARE_BOX_FEATURE_EXTRACTOR:
self.mask.feature_extractor = self.box.feature_extractor
if cfg.MODEL.KEYPOINT_ON and cfg.MODEL.ROI_KEYPOINT_HEAD.SHARE_BOX_FEATURE_EXTRACTOR:
self.keypoint.feature_extractor = self.box.feature_extractor
def forward(self, features, proposals, targets=None):
losses = {}
# TODO rename x to roi_box_features, if it doesn't increase memory consumption
x, detections, loss_box = self.box(features, proposals, targets)
losses.update(loss_box)
if self.cfg.MODEL.MASK_ON:
mask_features = features
# optimization: during training, if we share the feature extractor between
# the box and the mask heads, then we can reuse the features already computed
if (
self.training
and self.cfg.MODEL.ROI_MASK_HEAD.SHARE_BOX_FEATURE_EXTRACTOR
):
mask_features = x
# During training, self.box() will return the unaltered proposals as "detections"
# this makes the API consistent during training and testing
x, detections, loss_mask = self.mask(mask_features, detections, targets)
losses.update(loss_mask)
if self.cfg.MODEL.KEYPOINT_ON:
keypoint_features = features
# optimization: during training, if we share the feature extractor between
# the box and the mask heads, then we can reuse the features already computed
if (
self.training
and self.cfg.MODEL.ROI_KEYPOINT_HEAD.SHARE_BOX_FEATURE_EXTRACTOR
):
keypoint_features = x
# During training, self.box() will return the unaltered proposals as "detections"
# this makes the API consistent during training and testing
x, detections, loss_keypoint = self.keypoint(keypoint_features, detections, targets)
losses.update(loss_keypoint)
return x, detections, losses
def build_roi_heads(cfg, in_channels):
# individually create the heads, that will be combined together
# afterwards
roi_heads = []
if cfg.MODEL.RETINANET_ON:
return []
if not cfg.MODEL.RPN_ONLY:
roi_heads.append(("box", build_roi_box_head(cfg, in_channels)))
if cfg.MODEL.MASK_ON:
roi_heads.append(("mask", build_roi_mask_head(cfg, in_channels)))
if cfg.MODEL.KEYPOINT_ON:
roi_heads.append(("keypoint", build_roi_keypoint_head(cfg, in_channels)))
# combine individual heads in a single module
if roi_heads:
roi_heads = CombinedROIHeads(cfg, roi_heads)
return roi_heads
rpn/loss.py
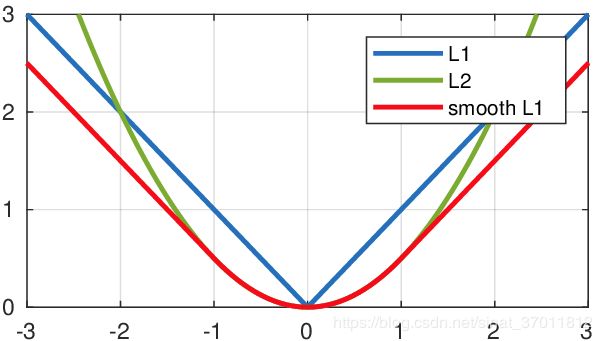
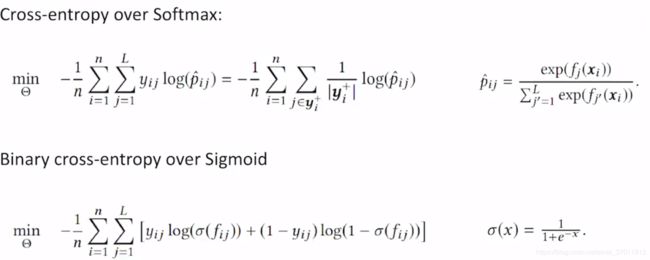
这里计算rpn的loss 会先对每个anchor找到对应的targets,然后将对应background的anchor label设置为0,objects的为1,丢弃的为-1 然后用smooth l1 和 binary cross entropy计算loss

# Copyright (c) Facebook, Inc. and its affiliates. All Rights Reserved.
"""
This file contains specific functions for computing losses on the RPN
file
"""
import torch
from torch.nn import functional as F
from .utils import concat_box_prediction_layers
from ..balanced_positive_negative_sampler import BalancedPositiveNegativeSampler
from ..utils import cat
from maskrcnn_benchmark.layers import smooth_l1_loss
from maskrcnn_benchmark.modeling.matcher import Matcher
from maskrcnn_benchmark.structures.boxlist_ops import boxlist_iou
from maskrcnn_benchmark.structures.boxlist_ops import cat_boxlist
class RPNLossComputation(object):
"""
This class computes the RPN loss.
"""
def __init__(self, proposal_matcher, fg_bg_sampler, box_coder,
generate_labels_func):
"""
Arguments:
proposal_matcher (Matcher)
fg_bg_sampler (BalancedPositiveNegativeSampler)
box_coder (BoxCoder)
"""
# self.target_preparator = target_preparator
self.proposal_matcher = proposal_matcher
self.fg_bg_sampler = fg_bg_sampler
self.box_coder = box_coder
self.copied_fields = []
self.generate_labels_func = generate_labels_func
self.discard_cases = ['not_visibility', 'between_thresholds']
def match_targets_to_anchors(self, anchor, target, copied_fields=[]):
match_quality_matrix = boxlist_iou(target, anchor)
matched_idxs = self.proposal_matcher(match_quality_matrix)
# RPN doesn't need any fields from target
# for creating the labels, so clear them all
target = target.copy_with_fields(copied_fields)
# get the targets corresponding GT for each anchor
# NB: need to clamp the indices because we can have a single
# GT in the image, and matched_idxs can be -2, which goes
# out of bounds
matched_targets = target[matched_idxs.clamp(min=0)]
matched_targets.add_field("matched_idxs", matched_idxs)
return matched_targets
def prepare_targets(self, anchors, targets):
labels = []
regression_targets = []
for anchors_per_image, targets_per_image in zip(anchors, targets):
matched_targets = self.match_targets_to_anchors(
anchors_per_image, targets_per_image, self.copied_fields
)
matched_idxs = matched_targets.get_field("matched_idxs")
labels_per_image = self.generate_labels_func(matched_targets)
labels_per_image = labels_per_image.to(dtype=torch.float32)
# Background (negative examples)
bg_indices = matched_idxs == Matcher.BELOW_LOW_THRESHOLD
labels_per_image[bg_indices] = 0
# discard anchors that go out of the boundaries of the image
if "not_visibility" in self.discard_cases:
labels_per_image[~anchors_per_image.get_field("visibility")] = -1
# discard indices that are between thresholds
if "between_thresholds" in self.discard_cases:
inds_to_discard = matched_idxs == Matcher.BETWEEN_THRESHOLDS
labels_per_image[inds_to_discard] = -1
# compute regression targets
regression_targets_per_image = self.box_coder.encode(
matched_targets.bbox, anchors_per_image.bbox
)
labels.append(labels_per_image)
regression_targets.append(regression_targets_per_image)
return labels, regression_targets
def __call__(self, anchors, objectness, box_regression, targets):
"""
Arguments:
anchors (list[BoxList])
objectness (list[Tensor])
box_regression (list[Tensor])
targets (list[BoxList])
Returns:
objectness_loss (Tensor)
box_loss (Tensor
"""
anchors = [cat_boxlist(anchors_per_image) for anchors_per_image in anchors]
labels, regression_targets = self.prepare_targets(anchors, targets)
sampled_pos_inds, sampled_neg_inds = self.fg_bg_sampler(labels)
sampled_pos_inds = torch.nonzero(torch.cat(sampled_pos_inds, dim=0)).squeeze(1)
sampled_neg_inds = torch.nonzero(torch.cat(sampled_neg_inds, dim=0)).squeeze(1)
sampled_inds = torch.cat([sampled_pos_inds, sampled_neg_inds], dim=0)
objectness, box_regression = \
concat_box_prediction_layers(objectness, box_regression)
objectness = objectness.squeeze()
labels = torch.cat(labels, dim=0)
regression_targets = torch.cat(regression_targets, dim=0)
box_loss = smooth_l1_loss(
box_regression[sampled_pos_inds],
regression_targets[sampled_pos_inds],
beta=1.0 / 9,
size_average=False,
) / (sampled_inds.numel())
objectness_loss = F.binary_cross_entropy_with_logits(
objectness[sampled_inds], labels[sampled_inds]
)
return objectness_loss, box_loss
# This function should be overwritten in RetinaNet
def generate_rpn_labels(matched_targets):
matched_idxs = matched_targets.get_field("matched_idxs")
labels_per_image = matched_idxs >= 0
return labels_per_image
def make_rpn_loss_evaluator(cfg, box_coder):
matcher = Matcher(
cfg.MODEL.RPN.FG_IOU_THRESHOLD,
cfg.MODEL.RPN.BG_IOU_THRESHOLD,
allow_low_quality_matches=True,
)
fg_bg_sampler = BalancedPositiveNegativeSampler(
cfg.MODEL.RPN.BATCH_SIZE_PER_IMAGE, cfg.MODEL.RPN.POSITIVE_FRACTION
)
loss_evaluator = RPNLossComputation(
matcher,
fg_bg_sampler,
box_coder,
generate_rpn_labels
)
return loss_evaluator
mask_head/loss.py
mask head 的loss计算逻辑是这样的:
match target to proposals 将rpn的proposals和ground truth的targets配对 配对的原则是IOU最大的那个 得到matched_targets
prepare targets 获取match_targets 中的index 然后从category, proposals和segmentation masks中挑选不是背景的(positive的), 之后用positive的proposal得到positive的masks用来计算后面的loss
这里的loss只计算是物体的loss,这里指的是上述所说的positive的proposal里positive的类别的mask的loss
值得注意的是这里的计算mask loss 的 mask的大小是 28*28的
# Copyright (c) Facebook, Inc. and its affiliates. All Rights Reserved.
import torch
from torch.nn import functional as F
from maskrcnn_benchmark.layers import smooth_l1_loss
from maskrcnn_benchmark.modeling.matcher import Matcher
from maskrcnn_benchmark.structures.boxlist_ops import boxlist_iou
from maskrcnn_benchmark.modeling.utils import cat
def project_masks_on_boxes(segmentation_masks, proposals, discretization_size):
"""
Given segmentation masks and the bounding boxes corresponding
to the location of the masks in the image, this function
crops and resizes the masks in the position defined by the
boxes. This prepares the masks for them to be fed to the
loss computation as the targets.
Arguments:
segmentation_masks: an instance of SegmentationMask
proposals: an instance of BoxList
"""
masks = []
M = discretization_size
device = proposals.bbox.device
proposals = proposals.convert("xyxy")
assert segmentation_masks.size == proposals.size, "{}, {}".format(
segmentation_masks, proposals
)
# FIXME: CPU computation bottleneck, this should be parallelized
proposals = proposals.bbox.to(torch.device("cpu"))
for segmentation_mask, proposal in zip(segmentation_masks, proposals):
# crop the masks, resize them to the desired resolution and
# then convert them to the tensor representation.
cropped_mask = segmentation_mask.crop(proposal)
scaled_mask = cropped_mask.resize((M, M))
mask = scaled_mask.get_mask_tensor()
masks.append(mask)
if len(masks) == 0:
return torch.empty(0, dtype=torch.float32, device=device)
return torch.stack(masks, dim=0).to(device, dtype=torch.float32)
class MaskRCNNLossComputation(object):
def __init__(self, proposal_matcher, discretization_size):
"""
Arguments:
proposal_matcher (Matcher)
discretization_size (int)
"""
self.proposal_matcher = proposal_matcher
self.discretization_size = discretization_size
def match_targets_to_proposals(self, proposal, target):
match_quality_matrix = boxlist_iou(target, proposal)
matched_idxs = self.proposal_matcher(match_quality_matrix)
# Mask RCNN needs "labels" and "masks "fields for creating the targets
target = target.copy_with_fields(["labels", "masks"])
# get the targets corresponding GT for each proposal
# NB: need to clamp the indices because we can have a single
# GT in the image, and matched_idxs can be -2, which goes
# out of bounds
matched_targets = target[matched_idxs.clamp(min=0)]
matched_targets.add_field("matched_idxs", matched_idxs)
return matched_targets
def prepare_targets(self, proposals, targets):
labels = []
masks = []
for proposals_per_image, targets_per_image in zip(proposals, targets):
matched_targets = self.match_targets_to_proposals(
proposals_per_image, targets_per_image
)
matched_idxs = matched_targets.get_field("matched_idxs")
labels_per_image = matched_targets.get_field("labels")
labels_per_image = labels_per_image.to(dtype=torch.int64)
# this can probably be removed, but is left here for clarity
# and completeness
neg_inds = matched_idxs == Matcher.BELOW_LOW_THRESHOLD
labels_per_image[neg_inds] = 0
# mask scores are only computed on positive samples
positive_inds = torch.nonzero(labels_per_image > 0).squeeze(1)
segmentation_masks = matched_targets.get_field("masks")
segmentation_masks = segmentation_masks[positive_inds]
positive_proposals = proposals_per_image[positive_inds]
masks_per_image = project_masks_on_boxes(
segmentation_masks, positive_proposals, self.discretization_size
)
labels.append(labels_per_image)
masks.append(masks_per_image)
return labels, masks
def __call__(self, proposals, mask_logits, targets):
"""
Arguments:
proposals (list[BoxList])
mask_logits (Tensor)
targets (list[BoxList])
Return:
mask_loss (Tensor): scalar tensor containing the loss
"""
labels, mask_targets = self.prepare_targets(proposals, targets)
labels = cat(labels, dim=0)
mask_targets = cat(mask_targets, dim=0)
positive_inds = torch.nonzero(labels > 0).squeeze(1)
labels_pos = labels[positive_inds]
# torch.mean (in binary_cross_entropy_with_logits) doesn't
# accept empty tensors, so handle it separately
if mask_targets.numel() == 0:
return mask_logits.sum() * 0
print(mask_targets.shape)
mask_loss = F.binary_cross_entropy_with_logits(
mask_logits[positive_inds, labels_pos], mask_targets
)
return mask_loss
def make_roi_mask_loss_evaluator(cfg):
matcher = Matcher(
cfg.MODEL.ROI_HEADS.FG_IOU_THRESHOLD,
cfg.MODEL.ROI_HEADS.BG_IOU_THRESHOLD,
allow_low_quality_matches=False,
)
loss_evaluator = MaskRCNNLossComputation(
matcher, cfg.MODEL.ROI_MASK_HEAD.RESOLUTION
)
return loss_evaluator