C-V2X模式4建模学习记录3--包冲突错误评估
目录
- 一、数据包冲突导致的错误的概率及流程图
- 二、求δCOL(dt,r)
- 1)求PINT(dt,r,di,r) Vi对Vr产生的干扰大于阈值的概率
- 2)求PSIM(dt,i) Vt和Vi使用同一资源概率
- ①三种负载情况
- ②求step2的P[2]SIM
- ③求出step3的P[3]SIM
- ③求CBR 信道繁忙率---从而求α
- 三、仿真设计
阅读本博客之前,请阅读前两章博客C-V2X建模记录1、C-V2X建模记录1
本章推理公式是自上而下,先从计算目标开始,往下推导。
一、数据包冲突导致的错误的概率及流程图
当发射车辆Vt在与另一辆干扰车辆Vi在相同的资源(即相同的子信道和子帧)上传输时会产生此错误,并且由于干扰车辆的SINR(信号功率与干扰和噪声的比值)不足,干扰车辆Vi对接收车辆Vr所产生的干扰会阻止接收车辆Vr正确接收Vt的数据包。
它取决于C-V2X模式4的SPS方案的配置和操作(笔记1中提到了),以及传输参数,传播,发射机与接收机之间的距离以及流量密度。在研究中,此类错误不包括在1),2)和3)中量化的错误。由于这种影响而无法正确接收数据包的概率称为δCOL。

流程图:

先计算接收车辆Vr接收到干扰车辆Vi的干扰信号大于阈值的概率,如果接收到的信号不大于阈值,直接就会被过滤掉了。
再计算发送车辆Vt和干扰车辆Vi使用同一资源传输的概率。
根据这两个值可以推出由干扰车辆Vi引起的碰撞导致包丢失的概率。
从而推出由任意车辆碰撞造成的包丢失的概率。
二、求δCOL(dt,r)

PINT(dt,r,di,r):由vi在接收器vr上产生的干扰高于阈值的概率,干扰车辆Vi的干扰大于阈值,可能会导致vt和vi同时使用同一资源进行传输。
PSIM(dt,i):Vt和Vi使用同一资源概率,取决MAC配置,即基于感测的SPS调度方案,以及传播条件和Vt与Vi之间的距离。
dt,r:发射机和接收机之间的距离
di,r:干扰源和接收器之间的距离
Vr:接收车辆
Vt:发送车辆
Vi:干扰车辆
由此我们需要求PINT(dt,r,di,r)、PSIM(dt,i)
1)求PINT(dt,r,di,r) Vi对Vr产生的干扰大于阈值的概率
为了计算PINT(dt,r,di,r),我们假设从车辆Vi接收的干扰信息对Vr接收器处的接收信号的负面影响等效于附加噪声。接收器Vr经历的SINR可以表示为:

Pr在博客C-V2X笔记2中错误形式(2)定义了,Pr符合正太分布。
(这一块关于这个公式的具体形式,仍有一点疑问,需要细读代码)
从Pr和Pi的概率分布关系的互相关中获得SINR的概率分布函数Fsinr。

该等式包括由于传播效应而无法接收的分组,即没有从Vi的干扰也将丢失的分组。这个已经在错误模式(3)——δPRO中考虑了这些数据包,
执行以下归一化操作,以仅考虑由于PINT中的冲突而丢失的那些数据包:

2)求PSIM(dt,i) Vt和Vi使用同一资源概率
①三种负载情况
使用同一资源的概率要考虑资源调度方法,之前博客C-V2X提出了该资源调度方法是:基于感知的半永久资源调度,对于PSIM(dt,i)的计算要分为3个情况考虑。高负载时、中等负载时、低负载时。
基于感知的半永久资源调度:
step1:确定选择窗口中的总资源数N
step2:剔除所以不符合要求的资源NE,使可选择的资源NA至少达到总资源数的20%,小于20%,则增加阈值直到达到20%,构建可选择资源列表LA。
step3:根据可选择资源列表LA建立候选资源列表LC,使LC包含的资源数NC=20%资源总数N。
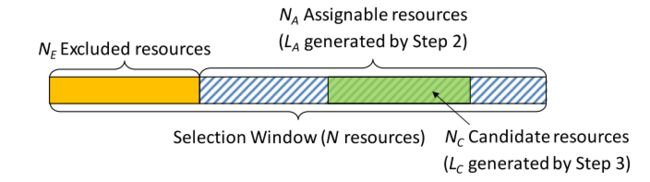
下图展示了高负载和低负载step2和step3的资源选择情况:
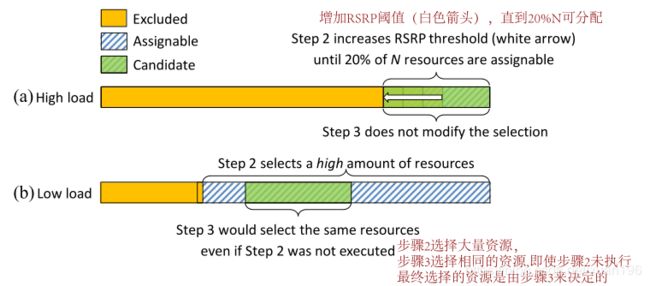
高负载情况下:

低负载情况下:

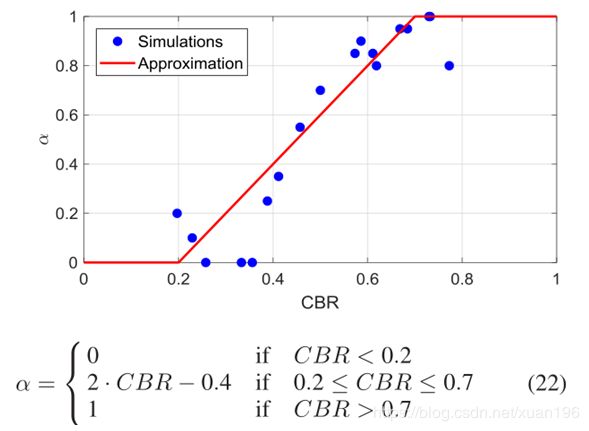
中等负载情况下考虑加权:

α的特定值取决于信道负载,在此研究中,使用CBR(信道繁忙率)来衡量该值,CBR表示感知为忙碌的资源的平均数量的比率。CBR=NE/N,这个值是由仿真得来的。
自从我们的计算转换为求解P[2]SIM、P[3]SIM和CBR
其中:CBR=NE/N。NE排除的资源数量,N是选择窗口资源总数。
N:“选择窗口”中包含的所有子帧中的资源总数
NE:步骤2中排除的资源数量
NA:可分配资源的数量,步骤2中未排除的资源数量 NA= N-NE
NC:步骤2和3之后可以使用的候选资源的数量 NC=20%N
假设场景中车辆均匀分布并且具有相同的传输参数
所有车辆的N,NE,NA和NC均相同
需要计算车辆vt和vi的公共排除资源数CE,公共可分配资源数CA,公共候选资源CC,以便计算使用相同资源的vt和vi传播的概率。

②求step2的P[2]SIM
CC(dt,i):车辆vt和vi之间的公共候选资源的数量,取决于两个车辆之间的距离
Ps(dt,i):vt和vi在选择新资源之前未考虑其各自传输的概率
1/Nc*Nc:不考虑彼此传输导致选择同一资源的概率

①评估Ps(dt,i)引入了一下公式:
![]()
比如:当包感知率=1时,那不考虑彼此传输的概率就为0
②评估CC(dt,i),引入一下公式
这一块很疑惑

计算(26)里面的变量CA(dt,i),NC=20%N、NA=N-NE
其中N:step1资源总数

NE: 步骤2排除的资源数量,取决于交通密度、选择窗口的资源总数、传输功率和方案
SPSR表示如果没有数据包冲突,则车辆在“选择窗口”中可以感知的平均车辆数量
(29)是通过仿真实验模拟出来的近似公式
这一块公式很迷惑,论文中也没有详细讲 下面一块的公式最好配合代码一起看 代码我懒得看了 暂时不做这一块的研究了 有兴趣的可以自己看看

求SPSR:如果接收信号功率高于检测功率阈值,则可以考虑检测到位于给定距离d处的车辆发送的数据包。

如果车辆经过较长距离,则每个车辆所排除的资源都可以视为独立资源。在这种情况下,两个车辆之间的共同排除资源的比例趋于NE/N,因此,共同排斥资源CE的数量趋于NE*NE/ N
(这一段不是很理解 等式30的推导说得不是很明白 字面上理解可把前面半段当做一个和距离相关的修正因子)

RPSR(dt,i) 是PSR函数的自相关
对于上述公式的解说:
车辆Vk正使用特定资源传输
车辆Vi和Vt排除该资源的概律RPSR(dt,i)用PSR(包感知率)来评估。
RPSR(dt,i)=PSR(dt,i+di,k)*PSR(di,k)
至此由等式(23)~(30.2)可求出P[2]SIM。
③求出step3的P[3]SIM
这一块论文就一笔带过 最好看代码
等式(31)与等式(23)类似,参考上述过程即可求出step3的概率。

P[3]SIM和 P[2]SIM 主要区别是公式(29)所排除的NE可能会大于0.8N
需要增加感应阈值PSEN,使NE<0.8N

公式(32.1)使用2β因子,而不是公式(29.1)中的β。
因为考虑step3交通密度翻一倍。
③求CBR 信道繁忙率—从而求α

NE和N都在之前的等式里评估了
至此根据上述所有公式就可以求出数据包冲突导致的错误的概率 δCOL(dt,r)
三、仿真设计
场景:模拟考虑的是5公里长的高速公路,其中有4条车道(每个行驶方向2条车道),车辆行驶速度为70 km / h。为避免边界影响,仅对位于模拟场景中心2公里处的车辆进行统计。
考虑到车辆以λ= 10 Hz的速率发送数据包
传输功率Pt = 20 dBm
使用QPSK和0.7的编码速率发送MCS
该设置导致每个分组占用10个RB,因此每个子帧有4个子信道
不同的分组传输频率以及使用QPSK和0.5(编码率每子帧2个子信道)的MCS进行了验证。
主要参数,这些参数遵循3GPP准则评估C-V2X模式4
