- 1 init进程
- 2 fork
- 3 小结
本节思考题
- 在内核中如何获取当前进程的task_struct数据结构?
- 下面程序会打印出几个“_”?
int main(void)
{
int i ;
for(i=0; i<2; i++){
fork();
printf("_\n");
}
wait(NULL);
wait(NULL);
return 0;
}- 用户空间进程的页表是什么时候分配的,其中一级页表什么时候分配?二级页表呢?
- 请简述fork,vfork和clone之间的区别?
进程并不仅局限于一段可执行代码(代码段),它还包括进程需要的其他资源,例如打开的文件、挂起的信号量、内存管理、处理器状态、一个或者多个执行线程和数据段等。Linux内核通常把进程叫作是任务(task),因此进程控制块(processing control block,PCB)也被命名为struct task_struct。进程最开始被称为工作(job),后来改名为进程(process)。
线程被称为轻量级进程,它是操作系统调度的最小单元,通常一个进程可以拥有多个线程。线程和进程的区别在于进程拥有独立的资源空间,而线程则共享进程的资源空间。Linux内核并没有对线程有特别的调度算法或定义特别的数据结构来标识线程,线程和进程都使用相同的进程PCB数据结构。内核里使用clone方法来创建线程,其工作方式和创建进程fork方法类似,但会确定哪些资源和父进程共享,哪些资源为线程独享。
进程通常通过fork系统调用来创新一个新的进程,新创建的进程可以通过exec()函数创建新的地址空间,并载入新的程序。进程结束可以自愿退出或非自愿退出。
本章主要讲述fork系统调用的实现.fork的实现会涉及到进程管理、内存管理、文件系统和信号处理等内容,本章会讲述一些核心的实现过程。
1 init进程
Linux内核在启动时会有一个init_task进程,它是系统所有进程的“鼻袓”,称为0号进程(也被称为idle进程或swapper进程),当系统没有进程需要调度时,调度器就会去执行idle进程.
idle进程在内核启动 (start_kernel()函数)时静态创建,所有的核心数据结构都预先静态赋值。init_task进程的task_struct数据结构通过INIT_TASK宏来赋值,定义在include/linux/init_task.h文件中。
[init/init_task.c]
struct task_struct init_task = INIT_TASK(init_task);
EXPORT_SYMBOL(init_task);
[include/linux/init_task.h]
#define INIT_TASK(tsk) \
{ \
.state = 0, \
// 第1处
.stack = &init_thread_info, \
.usage = ATOMIC_INIT(2), \
// 第2处
.flags = PF_KTHREAD, \
.prio = MAX_PRIO-20, \
.static_prio = MAX_PRIO-20, \
.normal_prio = MAX_PRIO-20, \
.policy = SCHED_NORMAL, \
.cpus_allowed = CPU_MASK_ALL, \
.nr_cpus_allowed= NR_CPUS, \
.mm = NULL, \
// 第3处
.active_mm = &init_mm, \
.restart_block = { \
.fn = do_no_restart_syscall, \
}, \
.se = { \
.group_node = LIST_HEAD_INIT(tsk.se.group_node), \
}, \
.rt = { \
.run_list = LIST_HEAD_INIT(tsk.rt.run_list), \
.time_slice = RR_TIMESLICE, \
}, \
.tasks = LIST_HEAD_INIT(tsk.tasks), \
INIT_PUSHABLE_TASKS(tsk) \
INIT_CGROUP_SCHED(tsk) \
.ptraced = LIST_HEAD_INIT(tsk.ptraced), \
.ptrace_entry = LIST_HEAD_INIT(tsk.ptrace_entry), \
.real_parent = &tsk, \
.parent = &tsk, \
.children = LIST_HEAD_INIT(tsk.children), \
.sibling = LIST_HEAD_INIT(tsk.sibling), \
.group_leader = &tsk, \
RCU_POINTER_INITIALIZER(real_cred, &init_cred), \
RCU_POINTER_INITIALIZER(cred, &init_cred), \
.comm = INIT_TASK_COMM, \
.thread = INIT_THREAD, \
.fs = &init_fs, \
.files = &init_files, \
.signal = &init_signals, \
···
}
[arch/arm/include/asm/thread_info.h]
#define init_thread_info (init_thread_union.thread_info)init/init_task.c的头文件在include/linux/init_task.h
init_task进程的task_struct数据结构中stack成员指向thread_info数据结构。
通常内核栈大小是8KB,即两个物理页面的大小,它存放在内核映像文件中data段中,在编译链接时预先分配好,具体见arch/arm/kernel/vmlinux.lds.S链接文件。
[arch/arm/kernel/vmlinux.lds.S]
SECTIONS
{
.data : AT(__data_loc) {
_data = .; /* address in memory */
_sdata = .;
/*
* first, the init task union, aligned
* to an 8192 byte boundary.
*/
// 重点位置,x86也是
INIT_TASK_DATA(THREAD_SIZE)
···
_edata = .;
}
}
[arch/arm/include/asm/thread_info.h]
#define THREAD_SIZE_ORDER 1
#define THREAD_SIZE {PAGE_SIZE << THREAD_SIZE_ORDER)
#define THREAD_START_SP (THREAD_SIZE - 8)
[include/asm-generic/vmlinux.Ids.h]
#define INIT_TASK_DATA (align) \
. = ALIGN(align); \
*(.data..init_task)由链接文件可以看到data段预留了8KB的空间用于内核栈(!!!),存放在data段的“.data..init_task”中。
_init_task_data宏会直接读取“.data..init_task”段内存,并且存放了一个thread_union联合数据结构,从联合数据结构可以看出其分布情况:开始的地方存放了struct thread_info数据结构,顶部往下的空间用于内核栈空间。
[include/linux/init_task.h]
/* Attach to the init_task data structure for proper alignment */
// __init_task_data 存放在 .data..init_task段
#define __init_task_data __attribute__((__p__(".data..init_task")))
[init/init_task.c]
/*
* Initial thread structure. Alignment of this is handled by a special
* linker map entry.
*/
// __init_task_data声明为thread_union类型,描述了整个内核栈stack[]
// __init_task_data通过INIT_THREAD_INFO初始化
union thread_union init_thread_union __init_task_data =
{ INIT_THREAD_INFO(init_task) };
[include/linux/sched.h]
union thread_union {
struct thread_info thread_info;
unsigned long stack[THREAD_SIZE/sizeof(long)];
};
[arch/arm/include/asm/thread_info.h]
#define INIT_THREAD_INFO(tsk) \
{ \
.task = &tsk, \
.exec_domain = &default_exec_domain, \
.flags = 0, \
.preempt_count = INIT_PREEMPT_COUNT, \
.addr_limit = KERNEL_DS, \
.cpu_domain = domain_val(DOMAIN_USER, DOMAIN_MANAGER) | \
domain_val(DOMAIN_KERNEL, DOMAIN_MANAGER) | \
domain_val(DOMAIN_IO, DOMAIN_CLIENT), \
}__init_task_data存放在".data..init_task"段中,__init_task_data声明为thread_union类型,thread_union类型描述了整个内核栈stack[],栈的最下面存放struct thread_info数据结构,因此__init_task_data也通过INIT_THREAD_INFO宏来初始化struct thread_info数据结构。init进程的task_struct数据结构通过INIT_TASK宏来初始化。
ARM32处理器从汇编代码跳转到C语言的入口点在start_kernel()函数之前,设置了SP寄存器指向8KB内核栈顶部区域(要预留8Byte<字节>的空洞)。
[arch/arm/kernel/head-common.S]
__mmap_switched:
// 重点1
adr r3, __mmap_switched_data
ldmia r3!, {r4, r5, r6, r7}
cmp r4, r5 @ Copy data segment if needed
1: cmpne r5, r6
ldrne fp, [r4], #4
strne fp, [r5], #4
bne 1b
mov fp, #0 @ Clear BSS (and zero fp)
1: cmp r6, r7
strcc fp, [r6],#4
bcc 1b
//重点2
ARM( ldmia r3, {r4, r5, r6, r7, sp})
THUMB( ldmia r3, {r4, r5, r6, r7} )
THUMB( ldr sp, [r3, #16] )
str r9, [r4] @ Save processor ID
str r1, [r5] @ Save machine type
str r2, [r6] @ Save atags pointer
cmp r7, #0
strne r0, [r7] @ Save control register values
// 跳转到start_kernel
b start_kernel
ENDPROC(__mmap_switched)
.align 2
.type __mmap_switched_data, %object
__mmap_switched_data:
.long __data_loc @ r4
.long _sdata @ r5
.long __bss_start @ r6
.long _end @ r7
.long processor_id @ r4
.long __machine_arch_type @ r5
.long __atags_pointer @ r6
#ifdef CONFIG_CPU_CP15
.long cr_alignment @ r7
#else
.long 0 @ r7
#endif
//重点3 THREAD_START_SP
.long init_thread_union + THREAD_START_SP @ sp
.size __mmap_switched_data, . - __mmap_switched_data
[arch/arm/include/asm/thread_info.h]
#define THREAD_START_SP (THREAD_SIZE - 8)汇编代码__mmap_switched标签处设置相关r3~r7以及SP寄存器,其中,SP寄存器指向data段预留8KB空间的顶部(8KB-8),然后跳转到start_kernel().
x86情况下,在arch/x86/kernel/head_32.S中,然后会跳转到函数i386_start_kernel(arch/x86/kernel/head32.c中),然后里面会调用start_kernel(init/main.c).
__mmap_switched_data标签处定义了r4~sp寄存器的值,相当于一个表,通过adr指令把这表读取到r3寄存器中,然后再通过ldmia指令写入相应寄存器中。
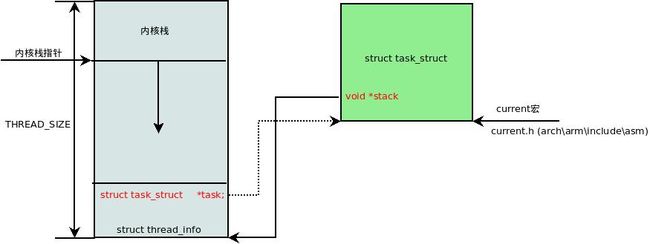
内核有一个常用的常量current用于获取当前进程task_struct数据结构,它利用了内核栈的特性。首先通过SP寄存器获取当前内核栈的地址,对齐后可以获取struct thread_info数据结构指针,最后通过thread_info->task成员获取task_struct数据结构。如图3.1所示是Linux内核栈的结构图。
[include/asm-generic/current.h]
#define get_current() (current_thread_info()->task)
#define current get_current()
[arch/arm/include/asm/thread_info.h]
register unsigned long current_stack_pointer asm ("sp");
static inline struct thread_info *current_thread_info(void)
{
return (struct thread_info *)
(current_stack_pointer & ~(THREAD_SIZE - 1));
}图3.1 内核栈:

struct thread_info数据结构定义如下:
[arch/arm/include/asm/thread_info.h]
/*
* low level task data that entry.S needs immediate access to.
* __switch_to() assumes cpu_context follows immediately after cpu_domain.
*/
struct thread_info {
unsigned long flags; /* low level flags */
int preempt_count; /* 0 => preemptable, <0 => bug */
mm_segment_t addr_limit; /* address limit */
struct task_struct *task; /* main task structure */
struct exec_domain *exec_domain; /* execution domain */
__u32 cpu; /* cpu */
__u32 cpu_domain; /* cpu domain */
struct cpu_context_save cpu_context; /* cpu context */
__u32 syscall; /* syscall number */
__u8 used_cp[16]; /* thread used copro */
unsigned long tp_value[2]; /* TLS registers */
#ifdef CONFIG_CRUNCH
struct crunch_state crunchstate;
#endif
union fp_state fpstate __attribute__((aligned(8)));
union vfp_state vfpstate;
#ifdef CONFIG_ARM_THUMBEE
unsigned long thumbee_state; /* ThumbEE Handler Base register */
#endif
};2 fork
在 Linux系统中,进程或线程是通过fork、vfork或clone等系统调用来建立的。在内核中,这3个系统的调用都是通过同一个函数来实现,即do_fork()函数,该函数定义在fork.c文件中。
[kernel/fork.c]
long do_fork(unsigned long clone_flags,
unsigned long stack_start,
unsigned long stack_size,
int __user *parent_tidptr,
int __user *child_tidptr)do_fork()函数有5个参数,具体含义如下。
- clone_flags:创建进程的标志位集合.
- stack_start:用户态栈的起始地址.
- stack_size:用户态栈的大小,通常设置为0.
- parent_tidptr和child_tidptr:指向用户空间中地址的两个指针,分别指向父进程的PID.
clone_flags定义在sched.h文件中
[include/uapi/linux/sched.h]
/*
* cloning flags:
*/
#define CSIGNAL 0x000000ff /* signal mask to be sent at exit */
//父子进程之间共享内存空间
#define CLONE_VM 0x00000100 /* set if VM shared between processes */
/* 父子进程之间共享相同的文件系统 */
#define CLONE_FS 0x00000200 /* set if fs info shared between processes */
/* 父子进程共享相同的文件描述符 */
#define CLONE_FILES 0x00000400 /* set if open files shared between processes */
/* 父子进程共享相同的信号处理等相关信息 */
#define CLONE_SIGHAND 0x00000800 /* set if signal handlers and blocked signals shared */
/* 父进程被trace,子进程也同样被trace */
#define CLONE_PTRACE 0x00002000 /* set if we want to let tracing continue on the child too */
/* 父进程被挂起,直到子进程释放了虚拟内存资源 */
#define CLONE_VFORK 0x00004000 /* set if the parent wants the child to wake it up on mm_release */
/* 新进程和创建它的进程是兄弟关系,而不是父子关系 */
#define CLONE_PARENT 0x00008000 /* set if we want to have the same parent as the cloner */
/* 父子进程共享相同的线程群 */
#define CLONE_THREAD 0x00010000 /* Same thread group? */- CLONE_VM : 父进程和子进程运行在同一个虚拟地址空间,一个进程对全局变量改动,另外一个进程也可以看到。
- CLONE_FS: 父进程和子进程共享文件系统信息,例如根目录、当前工作目录等。其中一个进程对文件系统信息进行改变,将会影响到另外一个进程,例如调用chroot()或 chdir()等。
- CLONE_FILES: 父进程和子进程共享文件描述符表。文件描述符表里面保存进程打开文件描述符的信息,因此一个进程打开的文件,在另外一个进程用同样的描述符也可以访问。一个进程关闭了一个文件或者使用fcntl()改变了一个文件属性,另外一个进程也能看到。
- CLONE_SIGHAND: 父进程和子进程共享信号处理器函数表。一个进程改变了某个信号处理函数,这个改动对于另外一个进程也有效。
- CLONE_PTRACE: 父进程被跟踪(ptrace) , 子进程也会被跟踪。
- CLONE_VFORK : 在创建子进程时启用Linux内核的完成机制(completion)。wait_for_completion()会使父进程进入睡眠等待,直到子进程调用execve()或 exit()释放虚拟内存资源。
其它标志位,可以在man linux手册中查看.
- fork实现: do_fork(SIGCHLD, 0, 0, NULL, NULL);
- vfork实现: do_fork(CLONE_VFORK | CLONE_VM | SIGCHLD, 0, 0, NULL, NULL);
- clone实现: do_fork(clone_flags, newsp, 0, parent_tidptr, child_tidptr);
- 内核线程: do_fork(flags|CLONE_VM|CLONE_UNTRACED, (unsigned long)fn, (unsigned long)arg, NULL, NULL);
四种实现都通过do_fork()完成,调用参数不一样.
fork只使用了SIGCHLD标志位,在子进程终止后发送SIGCHLD信号通知父进程.fork是重量级调用,为子进程建立了一个基于父进程的完整副本,然后子进程基于此运行。为了减少工作量采用写时复制技术(copy on write, COW ) , 子进程只复制父进程的页表,不会复制页面内容(只有页表,不复制页面!!!)。当子进程需要写入新内容时才触发写时复制机制,为子进程创建一个副本。
vfork的实现比fork多了两个标志位,分别是CLONE_VFORK和CLONE_VM.CLONE_VFORK表示父进程会被挂起,直至子进程释放虚拟内存资源。CLONE_VM表示父子进程运行在相同的内存空间中。
clone用于创建线程,并且参数通过寄存器从用户空间传递下来,通常会指定新的栈地址(newsp)。
do_fork()函数主要调用copy_process()函数创建一个新的进程。copy_process()函数比较长,下面分段来阅读,该函数的代码片段如下。
[kernel/fork.c]
static struct task_struct *copy_process(unsigned long clone_flags,
unsigned long stack_start,
unsigned long stack_size,
int __user *child_tidptr,
struct pid *pid,
int trace)
{
int retval;
struct task_struct *p;
if ((clone_flags & (CLONE_NEWNS|CLONE_FS)) == (CLONE_NEWNS|CLONE_FS))
return ERR_PTR(-EINVAL);
if ((clone_flags & (CLONE_NEWUSER|CLONE_FS)) == (CLONE_NEWUSER|CLONE_FS))
return ERR_PTR(-EINVAL);
/*
* Thread groups must share signals as well, and detached threads
* can only be started up within the thread group.
*/
if ((clone_flags & CLONE_THREAD) && !(clone_flags & CLONE_SIGHAND))
return ERR_PTR(-EINVAL);
/*
* Shared signal handlers imply shared VM. By way of the above,
* thread groups also imply shared VM. Blocking this case allows
* for various simplifications in other code.
*/
if ((clone_flags & CLONE_SIGHAND) && !(clone_flags & CLONE_VM))
return ERR_PTR(-EINVAL);
/*
* Siblings of global init remain as zombies on exit since they are
* not reaped by their parent (swapper). To solve this and to avoid
* multi-rooted process trees, prevent global and container-inits
* from creating siblings.
*/
if ((clone_flags & CLONE_PARENT) &&
current->signal->flags & SIGNAL_UNKILLABLE)
return ERR_PTR(-EINVAL);
/*
* If the new process will be in a different pid or user namespace
* do not allow it to share a thread group or signal handlers or
* parent with the forking task.
*/
if (clone_flags & CLONE_SIGHAND) {
if ((clone_flags & (CLONE_NEWUSER | CLONE_NEWPID)) ||
(task_active_pid_ns(current) !=
current->nsproxy->pid_ns_for_children))
return ERR_PTR(-EINVAL);
}
retval = security_task_create(clone_flags);
if (retval)
goto fork_out;
retval = -ENOMEM;
/* 重点函数*/
p = dup_task_struct(current);
if (!p)
goto fork_out;首先来做标志位的检查,CLONE_NEWNS表示父子进程不共享mount namespace,每个进程可以拥有属于自己的mount namespace。CLONE_NEWUSER表示子进程要创建新的User Namespace,User Namespace用于管理User ID和Group ID的映射,起到隔离User ID的作用。一个User Namespace可以形成一个容器(Contrainer),容器里第一个进程uid是0,即root用户。容器里的root用户不具备系统root权限,从系统角度看,该User Namespace并非特权用户,而只是一个普通用户。CLONE_FS要求父子进程共享文件系统信息,因此CLONE_NEWNS、CLONE_NEWUSER和CLONE_FS会产生矛盾。
CLONE_THREAD表示父子进程在同一个线程组里。POSIX协议规定在一个进程内部多个线程共享一个PID,但是Linux内核为每个线程和进程都同等对待地分配了PID。为了满足POSIX协议,Linux内核实现了一个线程组的概念(thread group)。sys_getpid()系统调用返回线程组ID(tgid,thread group id),sys_gettid()返回线程的PID。CLONE_SIGHAND表示父子进程共享相同的信号处理表,因此CLONE_THREAD和CLONE_SIGHAND两个标志位是最佳拍档,还有CLONE_VM也是。
CLONE_PARENT表示新创建的进程是兄弟关系,而不是父子关系,它们拥有相同的父进程。对于Linux内核来说,进程的“鼻祖”是idle进程,也称为swapper进程;但对用户空间来说,进程的“鼻祖”是init进程,所有用户空间进程都由init进程创建和派生。只有init进程才会设置SIGNAL_UNKILLABLE标志位。如果init进程或者容器init进程要使用CLONE_PARENT创建兄弟进程,那么该进程无法由init进程回收,父进程idle进程也无能为力,因此它会变成僵尸进程(zombie).
CLONE_NEWPID表示创建一个新的PID namespace。在没有PID namespace之前,进程唯一的标识是PID,在引入PID namespace之后,标识一个进程需要PID namespace和PID双重认证。CLONE_NEWUSER、CLONE_NEWPID和CLONE_SIGHAND共享信号会有冲突。
上述标志位涉及到命名空间技术(namespace)。命名空间技术主要是做访问隔离,其原理是针对一类资源进行抽象,并将其封装在一起提供给一个容器(container)来使用。每个容器都有自己的抽象,它们彼此之间不可见,因此访问是隔离的。
dup_task_struct()函数会分配一个task_struct实例。
[kernel/fork.c]
static struct task_struct *dup_task_struct(struct task_struct *orig)
{
struct task_struct *tsk;
struct thread_info *ti;
int node = tsk_fork_get_node(orig);
int err;
tsk = alloc_task_struct_node(node);
if (!tsk)
return NULL;
ti = alloc_thread_info_node(tsk, node);
if (!ti)
goto free_tsk;
//重点1
err = arch_dup_task_struct(tsk, orig);
if (err)
goto free_ti;
tsk->stack = ti;
// 重点2
setup_thread_stack(tsk, orig);
clear_user_return_notifier(tsk);
// 重点3
clear_tsk_need_resched(tsk);
set_task_stack_end_magic(tsk);
atomic_set(&tsk->usage, 2);
tsk->splice_pipe = NULL;
tsk->task_frag.page = NULL;
account_kernel_stack(ti, 1);
return tsk;
}首先分配一个struct task_struct和struct thread_info数据结构实例。struct task_struct是描述进程的核心数据结构,计算机术语称为进程控制块,主要用于描述进程的状态信息和控制信息。struct task_struct数据结构定义在include/linux/sched.h 文件中。struct thread_info数据结构用于存储进程描述符频繁访问和硬件快速访问的字段,它的定义依赖于具体体系结构的实现,例如ARM32体系结构其定义在arch/arm/include/asm/thread_info.h头文件中。
arch_dup_task_struct,把父进程的task_struct数据结构的内容复制到子进程的task_struct结构中。struct task_struct数据结构有一个成员stack指向struct thread_info实例,struct thread_info数据结构中也有一个成员task指针指向task_struct数据结构。
setup_thread_stack,把父进程的struct thread_info数据结构的内容复制到子进程的thread_info.
clear_tsk_need_resched,清除thread_info->flags中的TIF_NEED_RESCHED标志位,因为新进程还没有完全诞生,不希望现在被调度。
继续来看copy_process()函数
[kernel/fork.c]
...
retval = -EAGAIN;
if (atomic_read(&p->real_cred->user->processes) >=
task_rlimit(p, RLIMIT_NPROC)) {
if (p->real_cred->user != INIT_USER &&
!capable(CAP_SYS_RESOURCE) && !capable(CAP_SYS_ADMIN))
goto bad_fork_free;
}
current->flags &= ~PF_NPROC_EXCEEDED;
// 重点1
retval = copy_creds(p, clone_flags);
if (retval < 0)
goto bad_fork_free;
retval = -EAGAIN;
// 重点2
if (nr_threads >= max_threads)
goto bad_fork_cleanup_count;
if (!try_module_get(task_thread_info(p)->exec_domain->module))
goto bad_fork_cleanup_count;copy_creds,复制父进程的证书。
max_threads全局变量表示当前系统最多可以拥有的进程个数,这个值由系统内存大小来决定,详见fork_init()函数。nr_threads是系统的一个全局变量,如果系统己经分配了超过系统最大进程数目,那么分配将失败。上述两个全局变量都定义在fork.c文件中。
[kernel/fork.c]
int nr_threads; /* The idle threads do not count.. */
int max_threads; /* tunable limit on nr_threads */这两个值为什么不使用read_mostly来修饰呢(疑问)?特别是max_threads变量经常会被使用。read_mostly修饰的变量会放入.data.read_mostly段中,在内核加载时放入相应的cache中,以便提高效率.
[kernel/fork.c]
delayacct_tsk_init(p); /* Must remain after dup_task_struct() */
// 重点1,下面两行
p->flags &= ~(PF_SUPERPRIV | PF_WQ_WORKER);
p->flags |= PF_FORKNOEXEC;
INIT_LIST_HEAD(&p->children);
INIT_LIST_HEAD(&p->sibling);
// 重点2
rcu_copy_process(p);
p->vfork_done = NULL;
spin_lock_init(&p->alloc_lock);
init_sigpending(&p->pending);
p->utime = p->stime = p->gtime = 0;
p->utimescaled = p->stimescaled = 0;
#ifndef CONFIG_VIRT_CPU_ACCOUNTING_NATIVE
p->prev_cputime.utime = p->prev_cputime.stime = 0;
#endif
#ifdef CONFIG_VIRT_CPU_ACCOUNTING_GEN
seqlock_init(&p->vtime_seqlock);
p->vtime_snap = 0;
p->vtime_snap_whence = VTIME_SLEEPING;
#endif
#if defined(SPLIT_RSS_COUNTING)
memset(&p->rss_stat, 0, sizeof(p->rss_stat));
#endif
p->default_timer_slack_ns = current->timer_slack_ns;
task_io_accounting_init(&p->ioac);
acct_clear_integrals(p);
posix_cpu_timers_init(p);
p->start_time = ktime_get_ns();
p->real_start_time = ktime_get_boot_ns();
p->io_context = NULL;
p->audit_context = NULL;
if (clone_flags & CLONE_THREAD)
threadgroup_change_begin(current);
cgroup_fork(p);
#ifdef CONFIG_NUMA
p->mempolicy = mpol_dup(p->mempolicy);
if (IS_ERR(p->mempolicy)) {
retval = PTR_ERR(p->mempolicy);
p->mempolicy = NULL;
goto bad_fork_cleanup_threadgroup_lock;
}
#endif
#ifdef CONFIG_CPUSETS
p->cpuset_mem_spread_rotor = NUMA_NO_NODE;
p->cpuset_slab_spread_rotor = NUMA_NO_NODE;
seqcount_init(&p->mems_allowed_seq);
#endif
#ifdef CONFIG_TRACE_IRQFLAGS
p->irq_events = 0;
p->hardirqs_enabled = 0;
p->hardirq_enable_ip = 0;
p->hardirq_enable_event = 0;
p->hardirq_disable_ip = _THIS_IP_;
p->hardirq_disable_event = 0;
p->softirqs_enabled = 1;
p->softirq_enable_ip = _THIS_IP_;
p->softirq_enable_event = 0;
p->softirq_disable_ip = 0;
p->softirq_disable_event = 0;
p->hardirq_context = 0;
p->softirq_context = 0;
#endif
#ifdef CONFIG_LOCKDEP
p->lockdep_depth = 0; /* no locks held yet */
p->curr_chain_key = 0;
p->lockdep_recursion = 0;
#endif
#ifdef CONFIG_DEBUG_MUTEXES
p->blocked_on = NULL; /* not blocked yet */
#endif
#ifdef CONFIG_BCACHE
p->sequential_io = 0;
p->sequential_io_avg = 0;
#endif如果开启了CONFIG_TASK_DELAY_ACCT,那么进程task_struct中的delays成员记录等待相关的统计数据供用户空间程序使用。重点1的两行,task_struct数据结构中有一个成员flags用于存放进程重要的标志位,这些标志位定义在include/linux/sched.h文件中。这里首先取消使用超级用户权限并告诉系统这不是一个worker线程,worker线程由工作队列机制创建,另外设置PF_FORKNOEXEC标志位,这个进程暂时还不能执行。
[include/linux/sched.h]
/*
* Per process flags
*/
#define PF_EXITING 0x00000004 /* getting shut down */
#define PF_EXITPIDONE 0x00000008 /* pi exit done on shut down */
#define PF_VCPU 0x00000010 /* I'm a virtual CPU */
#define PF_WQ_WORKER 0x00000020 /* I'm a workqueue worker */
#define PF_FORKNOEXEC 0x00000040 /* forked but didn't exec */
#define PF_MCE_PROCESS 0x00000080 /* process policy on mce errors */
#define PF_SUPERPRIV 0x00000100 /* used super-user privileges */
#define PF_DUMPCORE 0x00000200 /* dumped core */
#define PF_SIGNALED 0x00000400 /* killed by a signal */
#define PF_MEMALLOC 0x00000800 /* Allocating memory */
#define PF_NPROC_EXCEEDED 0x00001000 /* set_user noticed that RLIMIT_NPROC was exceeded */
#define PF_USED_MATH 0x00002000 /* if unset the fpu must be initialized before use */
#define PF_USED_ASYNC 0x00004000 /* used async_schedule*(), used by module init */
#define PF_NOFREEZE 0x00008000 /* this thread should not be frozen */
#define PF_FROZEN 0x00010000 /* frozen for system suspend */
#define PF_FSTRANS 0x00020000 /* inside a filesystem transaction */
#define PF_KSWAPD 0x00040000 /* I am kswapd */
#define PF_MEMALLOC_NOIO 0x00080000 /* Allocating memory without IO involved */
#define PF_LESS_THROTTLE 0x00100000 /* Throttle me less: I clean memory */
#define PF_KTHREAD 0x00200000 /* I am a kernel thread */
#define PF_RANDOMIZE 0x00400000 /* randomize virtual address space */
#define PF_SWAPWRITE 0x00800000 /* Allowed to write to swap */
...
p->children链表是新进程的子进程链表,p->sibling链表是新进程的兄弟进程链表。重点2位置,对PREEMPT_RCU和TASKS_RCU进行初始化。接下来是对进程task_struct数据结构的一些成员进行初始化,之前进程task_struct数据结构的内容是从父进程复制过来的,但是作为新进程,有些内容还是要重新初始化
继续看copy_process()函数.
[copy_process()]
/* Perform scheduler related setup. Assign this task to a CPU. */
// 重点1
retval = sched_fork(clone_flags, p);
if (retval)
goto bad_fork_cleanup_policy;
...
// 重点2
retval = copy_thread(clone_flags, stack_start, stack_size, p);
if (retval)
goto bad_fork_cleanup_io;接下来是做内存空间、文件系统、信号系统、IO系统等核心内容的复制操作,这是fork进程的核心部分,我们分段来阅读,首先看sched_fork()函数。
[copy_process()->sched_fork()]
[kernel/sched/core.c]
int sched_fork(unsigned long clone_flags, struct task_struct *p)
{
unsigned long flags;
int cpu = get_cpu();
// 重点1
__sched_fork(clone_flags, p);
/*
* We mark the process as running here. This guarantees that
* nobody will actually run it, and a signal or other external
* event cannot wake it up and insert it on the runqueue either.
*/
p->state = TASK_RUNNING;
/*
* Make sure we do not leak PI boosting priority to the child.
*/
p->prio = current->normal_prio;
/*
* Revert to default priority/policy on fork if requested.
*/
// 恢复到默认的调度策略和优先级
if (unlikely(p->sched_reset_on_fork)) {
...
p->sched_reset_on_fork = 0;
}
if (dl_prio(p->prio)) {
put_cpu();
return -EAGAIN;
} else if (rt_prio(p->prio)) {
p->sched_class = &rt_sched_class;
} else {
p->sched_class = &fair_sched_class;
}
if (p->sched_class->task_fork)
p->sched_class->task_fork(p);
raw_spin_lock_irqsave(&p->pi_lock, flags);
// 重点2
set_task_cpu(p, cpu);
raw_spin_unlock_irqrestore(&p->pi_lock, flags);
#if defined(CONFIG_SCHEDSTATS) || defined(CONFIG_TASK_DELAY_ACCT)
if (likely(sched_info_on()))
memset(&p->sched_info, 0, sizeof(p->sched_info));
#endif
#if defined(CONFIG_SMP)
p->on_cpu = 0;
#endif
init_task_preempt_count(p);
#ifdef CONFIG_SMP
plist_node_init(&p->pushable_tasks, MAX_PRIO);
RB_CLEAR_NODE(&p->pushable_dl_tasks);
#endif
put_cpu();
return 0;
}__sched_fork()初始化进程调度相关的数据结构,调度实体用struct sched_entity数据结构来抽象,每个进程或线程都是一个调度实体,另外也包括组调度(sched group)。
[kernel/sched/core.c]
static void __sched_fork(unsigned long clone_flags, struct task_struct *p)
{
p->on_rq = 0;
p->se.on_rq = 0;
p->se.exec_start = 0;
p->se.sum_exec_runtime = 0;
p->se.prev_sum_exec_runtime = 0;
p->se.nr_migrations = 0;
p->se.vruntime = 0;
#ifdef CONFIG_SMP
p->se.avg.decay_count = 0;
#endif
INIT_LIST_HEAD(&p->se.group_node);
#ifdef CONFIG_SCHEDSTATS
memset(&p->se.statistics, 0, sizeof(p->se.statistics));
#endif
RB_CLEAR_NODE(&p->dl.rb_node);
init_dl_task_timer(&p->dl);
__dl_clear_params(p);
INIT_LIST_HEAD(&p->rt.run_list);
#ifdef CONFIG_PREEMPT_NOTIFIERS
INIT_HLIST_HEAD(&p->preempt_notifiers);
#endif
#ifdef CONFIG_NUMA_BALANCING
...
#endif /* CONFIG_NUMA_BALANCING */
}sched_fork()函数,task_struct中state表示进程的运行状态.主要有TASK_RUNNING、TASK_INTERRUPTIBLE、TASK_UNINTERRUPTIBLE、__TASK_STOPPED和EXIT_DEAD 等。
[include/1inux/sched.h]
#define TASK_RUNNING 0
#define TASK_INTERRUPTIBLE 1
#define TASK_UNINTERRUPTIBLE 2
#define __TASK_STOPPED 4
#define __TASK_TRACED 8这里设置为TASK_RUNNING,其实进程还没开始运行,因为还没有加入就绪队列(runqueue,或称可运行队列),外部事件或信号不能唤醒它.task_struct数据结构中prio成员表示进程的优先级,这里先用父进程的normal_prio优先级。
父进程使用sched_setscheduler()系统调用来重新设置进程的调度策略时设置了sched_flag_reset_on_fork标志位,它在fork子进程时会让子进程恢复到默认的调度策略和优先级。
sched_fork()函数接下来代码,内核中主要实现了4套调度策略,分别是SCHED_FAIR、SCHED_RT、SCHED_DEADLINE和SCHED_IDLE,并且都按照sched_class类来实现。前3个调度类通过如下进程优先级来区分。
- 普通进程的优先级: 100~139.
- 实时进程的优先级: 0~99.
- Deadline进程优先级: -1.
sched_fork()函数接下来,调用调度类中的task_fork方法做初始化动作。
再往下重点2的上下三行,首先get_cpu()函数获取当前CPU的ID,然后把当前CPU设置到新进程thread_info结构中的CPU成员中。get_cpu()函数首先关闭内核抢占,然后通过current_thread_info()函数来获取当前CPU的ID。
#define raw_smp_processor_id() (current_thread_info()->cpu)
#define smp_processor_id() raw_smp_processor_id()
#define get_cpu() ({ preempt_disable(); smp_processor_id();})
[kernel/sched/sched.h]
static inline void __set_task_cpu(struct task_struct *p, unsigned int cpu)
{
set_task_rq(p, cpu);
#ifdef CONFIG_SMP
/*
* After ->cpu is set up to a new value, task_rq_lock(p, ...) can be
* successfuly executed on another CPU. We must ensure that updates of
* per-task data have been completed by this moment.
*/
smp_wmb();
task_thread_info(p)->cpu = cpu;
p->wake_cpu = cpu;
#endif
}在设置thread_info->cpu之前,_set_task_cpu()函数用smp_wmb()写内存屏障语句来保证之前内容写入完成后才设置thread_info->cpu,这里与move_queued_task()和task_rq_lock()函数相关。
接下来,初始化thread_info数据结构中的preempt_count计数,为了支持内核抢占而引入该字段。当preempt_count为0时,表示内核可以被安全地抢占,大于0 时,则禁止抢占。
[include/asm-generic/preempt.h]
#define PREEMPT_ENABLED (0)
[include/linux/sched.h]
#ifdef CONFIG_PREEMPT_COUNT
#define PREEMPT_DISABLED (1 + PREEMPT_ENABLED)
#else
#define PREEMPT_DISABLED PREEMPT_ENABLED
#endif
[include/asm-generic/preempt.h]
#define init_task_preempt_count(p) do { \
task_thread_info(p)->preempt_count = PREEMPT_DISABLED; \
} while (0)preempt_count计数的结构如图3.2所示.
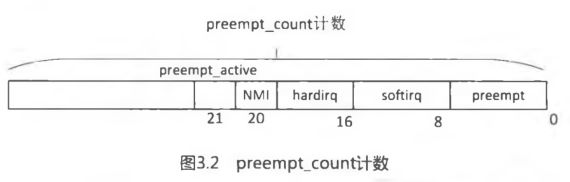
- PREEMPT_MASK (OxOOOOOOff)表示抢占计数,记录内核显式地被禁止抢占的次数。每次调用preempt_disable()时该域的值会加1,调用preempt_enable()该域的值会减1。preempt_disable()和preempt_enable()成对出现,可以嵌套的深度最大为255。
- SOFTIRQ_MASK (OxOOOOffOO) 表示软中断嵌套数量或嵌套的深度。
- HARDIRQ_MASK (OxOOOfDOOO) 表示硬件中断嵌套数量或嵌套的深度。
- NMI_MASK(0x00100000)表示NMI中断。
- PREEMPT_ACTIVE(0x00200000)表示当前己经被抢占或刚刚被抢占,通常用于表示抢占调度。
以上任何一个字段的值非零,那么内核的抢占功能都会被禁用。
内核提供preempt_disable()函数来关闭抢占,preempt_count计数会加1。preempt_enable()函数用于打开抢占,preempt_count计数会减1,然后判断是否为0并且检查thread_info中的TIF_NEED_RESCHED标志位,如果该位被置位,则调用schedule()函数完成调度抢占,详见_preempt_schedule()函数,这两个函数通常配对使用。
[include/linux/preempt.h]
#define preempt_disable() \
do { \
preempt_count_inc(); \
barrier(); \
} while (0)
#define preempt_enable() \
do { \
barrier(); \
if (unlikely(preempt_count_dec_and_test())) \
__preempt_schedule(); \
} while (0)最后,put_cpu()函数和get_cpu()函数配对使用,put_cpu()会使能内核抢占。
回到copy_process()函数中,copy_files()函数复制父进程打开的文件等信息,copy_fs()函数复制父进程fs_struct结构等信息,copy_signal()函数复制父进程的信号系统,copy_io()函数复制父进程IO相关的内容。下面我们来看copy_mm()函数,它复制父进程的内存空间。
[do_fork()->copy_process()->copy_mm()]
[kernel/fork.c]
static int copy_mm(unsigned long clone_flags, struct task_struct *tsk)
{
struct mm_struct *mm, *oldmm;
int retval;
tsk->min_flt = tsk->maj_flt = 0;
tsk->nvcsw = tsk->nivcsw = 0;
#ifdef CONFIG_DETECT_HUNG_TASK
tsk->last_switch_count = tsk->nvcsw + tsk->nivcsw;
#endif
tsk->mm = NULL;
tsk->active_mm = NULL;
/*
* Are we cloning a kernel thread?
*
* We need to steal a active VM for that..
*/
oldmm = current->mm;
if (!oldmm)
return 0;
/* initialize the new vmacache entries */
vmacache_flush(tsk);
if (clone_flags & CLONE_VM) {
atomic_inc(&oldmm->mm_users);
mm = oldmm;
goto good_mm;
}
retval = -ENOMEM;
// 重点
mm = dup_mm(tsk);
if (!mm)
goto fail_nomem;
good_mm:
tsk->mm = mm;
tsk->active_mm = mm;
return 0;
fail_nomem:
return retval;
}oldmm指父进程内存空间指针,oldmm为空,则说明父进程没有自己的运行空间,只是一个“寄人篱下”的线程或内核线程。如果要创建一个和父进程共享内存空间的新进程,那么直接将新进程的mm指针指向父进程的mm数据结构即可。dup_mm()函数分配一个mm数据结构,然后从父进程中复制相关内容。
[copy_mm()->dup_mm()]
[kernel/fork.c]
static struct mm_struct *dup_mm(struct task_struct *tsk)
{
struct mm_struct *mm, *oldmm = current->mm;
int err;
mm = allocate_mm();
if (!mm)
goto fail_nomem;
memcpy(mm, oldmm, sizeof(*mm));
// 重点1
if (!mm_init(mm, tsk))
goto fail_nomem;
dup_mm_exe_file(oldmm, mm);
// 重点2
err = dup_mmap(mm, oldmm);
if (err)
goto free_pt;
mm->hiwater_rss = get_mm_rss(mm);
mm->hiwater_vm = mm->total_vm;
if (mm->binfmt && !try_module_get(mm->binfmt->module))
goto free_pt;
return mm;
free_pt:
/* don't put binfmt in mmput, we haven't got module yet */
mm->binfmt = NULL;
mmput(mm);
fail_nomem:
return NULL;
}dup_mm()函数首先为新进程分配一个描述内存空间的mm_struct数据结构指针mm,然后把父进程mm数据结构的内容复制到新进程的mm_struct数据结构中。
[copy_mm()->dup_mm()->mm_init ()]
tatic struct mm_struct *mm_init(struct mm_struct *mm, struct task_struct *p)
{
mm->mmap = NULL;
mm->mm_rb = RB_ROOT;
mm->vmacache_seqnum = 0;
atomic_set(&mm->mm_users, 1);
atomic_set(&mm->mm_count, 1);
init_rwsem(&mm->mmap_sem);
INIT_LIST_HEAD(&mm->mmlist);
mm->core_state = NULL;
atomic_long_set(&mm->nr_ptes, 0);
mm_nr_pmds_init(mm);
mm->map_count = 0;
mm->locked_vm = 0;
mm->pinned_vm = 0;
memset(&mm->rss_stat, 0, sizeof(mm->rss_stat));
spin_lock_init(&mm->page_table_lock);
mm_init_cpumask(mm);
mm_init_aio(mm);
mm_init_owner(mm, p);
mmu_notifier_mm_init(mm);
clear_tlb_flush_pending(mm);
#if defined(CONFIG_TRANSPARENT_HUGEPAGE) && !USE_SPLIT_PMD_PTLOCKS
mm->pmd_huge_pte = NULL;
#endif
if (current->mm) {
mm->flags = current->mm->flags & MMF_INIT_MASK;
mm->def_flags = current->mm->def_flags & VM_INIT_DEF_MASK;
} else {
mm->flags = default_dump_filter;
mm->def_flags = 0;
}
// 重点
if (mm_alloc_pgd(mm))
goto fail_nopgd;
if (init_new_context(p, mm))
goto fail_nocontext;
return mm;
fail_nocontext:
mm_free_pgd(mm);
fail_nopgd:
free_mm(mm);
return NULL;
}mm_init()函数对新进程的struct mm_struct数据结构做初始化,例如mmap成员是进程中VMA链表的头,mm_rb是VMA红黑树的根。mm_users和mm_count引用计数都设置为1,它们的含义不同,mm_users表示在用户空间的用户个数,mm_count表示内核中引用了该数据结构的个数,类似page数据结构中_count引用计数。mmap_sem用于保护进程地址空间的读写信号量,page_table_lock用于保护进程页表的spinlock锁。
mm_alloc_pgd()函数为该进程分配PGD页表,不同的体系结构中有不同的实现。
[mm_init()->mm_alloc_pgd()->pgd_alloc()]
[arch/arm/mm/pgd.c]
pgd_t *pgd_alloc(struct mm_struct *mm)
{
pgd_t *new_pgd, *init_pgd;
pud_t *new_pud, *init_pud;
pmd_t *new_pmd, *init_pmd;
pte_t *new_pte, *init_pte;
new_pgd = __pgd_alloc();
if (!new_pgd)
goto no_pgd;
memset(new_pgd, 0, USER_PTRS_PER_PGD * sizeof(pgd_t));
/*
* Copy over the kernel and IO PGD entries
*/
init_pgd = pgd_offset_k(0);
memcpy(new_pgd + USER_PTRS_PER_PGD, init_pgd + USER_PTRS_PER_PGD,
(PTRS_PER_PGD - USER_PTRS_PER_PGD) * sizeof(pgd_t));
clean_dcache_area(new_pgd, PTRS_PER_PGD * sizeof(pgd_t));
#ifdef CONFIG_ARM_LPAE
/*
* Allocate PMD table for modules and pkmap mappings.
*/
new_pud = pud_alloc(mm, new_pgd + pgd_index(MODULES_VADDR),
MODULES_VADDR);
if (!new_pud)
goto no_pud;
new_pmd = pmd_alloc(mm, new_pud, 0);
if (!new_pmd)
goto no_pmd;
#endif
if (!vectors_high()) {
/*
* On ARM, first page must always be allocated since it
* contains the machine vectors. The vectors are always high
* with LPAE.
*/
new_pud = pud_alloc(mm, new_pgd, 0);
if (!new_pud)
goto no_pud;
new_pmd = pmd_alloc(mm, new_pud, 0);
if (!new_pmd)
goto no_pmd;
new_pte = pte_alloc_map(mm, NULL, new_pmd, 0);
if (!new_pte)
goto no_pte;
init_pud = pud_offset(init_pgd, 0);
init_pmd = pmd_offset(init_pud, 0);
init_pte = pte_offset_map(init_pmd, 0);
// 重点1,下面两行
set_pte_ext(new_pte + 0, init_pte[0], 0);
set_pte_ext(new_pte + 1, init_pte[1], 0);
pte_unmap(init_pte);
pte_unmap(new_pte);
}
return new_pgd;
no_pte:
pmd_free(mm, new_pmd);
mm_dec_nr_pmds(mm);
no_pmd:
pud_free(mm, new_pud);
no_pud:
__pgd_free(new_pgd);
no_pgd:
return NULL;
}对于ARM32处理器来说,首先分配16KB物理内存作为新进程的页表,然后在memcpy中复制init进程内核空间的PGD页表项到新进程页表中。内核空间(3~4GB)是内核线程和所有用户进程共享的空间。ARM处理器的异常向量表分低端向量表和高端向量表。如果使用低端向量表,地址空间中第一个页面和第二页面通常包含ARM处理器的向量表和相应的信息,因此新进程页表中这一部分页表项内容需要设置,最好的办法是从init进程的页表中复制过来,见重点1中的init_pte[0]和init_pte[1],设置之前需要为新进程分配一组pte页表,详见pte_alloc_map()函数。
看dnp_mm()函数中dup_mmap()函数的实现。
...
...
...
回到do_fork主函数中。
long do_fork(unsigned long clone_flags,
unsigned long stack_start,
unsigned long stack_size,
int __user *parent_tidptr,
int __user *child_tidptr)
{
...
p = copy_process(clone_flags, stack_start, stack_size,
child_tidptr, NULL, trace);
/*
* Do this prior waking up the new thread - the thread pointer
* might get invalid after that point, if the thread exits quickly.
*/
if (!IS_ERR(p)) {
struct completion vfork;
struct pid *pid;
trace_sched_process_fork(current, p);
pid = get_task_pid(p, PIDTYPE_PID);
nr = pid_vnr(pid);
if (clone_flags & CLONE_PARENT_SETTID)
put_user(nr, parent_tidptr);
if (clone_flags & CLONE_VFORK) {
p->vfork_done = &vfork;
init_completion(&vfork);
get_task_struct(p);
}
wake_up_new_task(p);
/* forking complete and child started to run, tell ptracer */
if (unlikely(trace))
ptrace_event_pid(trace, pid);
if (clone_flags & CLONE_VFORK) {
if (!wait_for_vfork_done(p, &vfork))
ptrace_event_pid(PTRACE_EVENT_VFORK_DONE, pid);
}
put_pid(pid);
} else {
nr = PTR_ERR(p);
}
return nr;
}
在do_fork()主函数中,copy_process()函数成功创建了一个新的进程。对于vfork创建的子进程,首先要保证子进程先运行。在调用exec或exit之前,父子进程是共享数据的,在子进程调用exec或者exit之后,父进程才可以被调度运行,因此这里使用一个vfork_done完成量来达到扣留父进程的作用.wake_up_new_task()函数准备唤醒新创建的进程,也就是把进程加入调度器里接受调度运行。最后父进程返回用户空间时,其返回值为进程的pid,而子进程返回用户空间时,其返回值为0。
3 小结
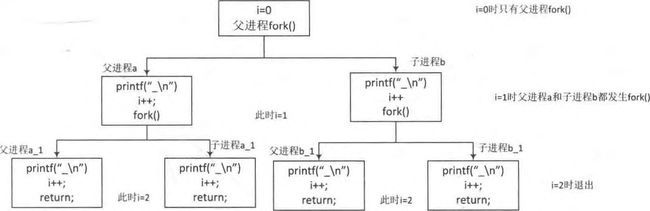
第2道思考题,一共打印出来几个"_"呢?
int main(void)
{
int i ;
for(i=0; i<2; i++){
fork();
printf("_\n");
}
wait(NULL);
wait(NULL);
return 0;
}最终打印了6个"_".