CAN 通信测试工具 canutils
概述
CAN,Controller Area Network,控制器局域网,一种高可靠性的现场总线。广泛用于汽车电子、工业控制通信。
canutils 工具包内含 5 个独立的程序:canconfig、candump、canecho、cansend、cansequence。这几个程序的功能简述如下:
- canconfig:用于配置 CAN 总线接口的参数,主要是波特率和模式。
- candump:从 CAN 总线接口接收数据并以十六进制形式打印到标准输出,也可以输出到指定文件。
- canecho:把从 CAN 总线接口接收到的所有数据重新发送到 CAN 总线接口。
- cansend:往指定的 CAN 总线接口发送指定的数据。
- cansequence:往指定的 CAN 总线接口自动重复递增数字,也可以指定接收模式并校验检查接收的递增数字。
编译
下载源码
canutils 源码可以从以下地址下载,源码的编译依赖 libsocketcan 库,所以同时需要下载该库的源码。
https://public.pengutronix.de/software/socket-can/canutils/
http://public.pengutronix.de/software/libsocketcan/
以下以 57x 平台编译为例,具体的路径以实际情况修改。
加载编译环境:
# source ~/57x/ti-processor-sdk-linux-rt-am57xx-evm-04.03.00.05/linux-devkit/environment-setup
编译 libsocketcan 库
# tar xf libsocketcan-0.0.11.tar.bz2
# cd libsocketcan-0.0.11/
# mkdir build
# ./configure --prefix=/home/jack/57x/demo/can/libsocketcan-0.0.11/build --host=arm-linux-gnueabihf
# make && make install
编译 canutils
# tar xf canutils-4.0.6.tar.bz2
# cd canutils-4.0.6/
# make build
# ./configure --prefix=/home/jack/57x/demo/can/canutils-4.0.6/build/ --host=arm-linux-gnueabihf libsocketcan_LIBS=-lsocketcan libsocketcan_LDFLAGS="/home/jack/57x/demo/can/libsocketcan-0.0.11/build/lib" libsocketcan_CFLAGS="/home/jack/57x/demo/can/libsocketcan-0.0.11/build/include"
# make && make install
生成的可执行程序在当前 build 目录下。
运行
canconfig
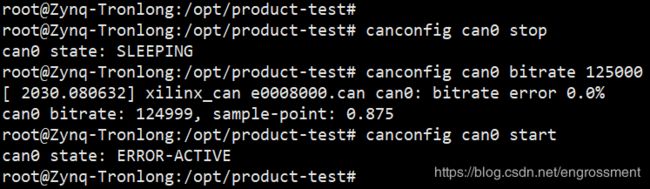
先设置模式为停止,然后设置波特率,再启动。一般系统起来后都需要先配置 CAN,后续几个程序才能正常使用。
TARGET# canconfig can0 stop
TARGET# canconfig can0 bitrate 125000
TARGET# canconfig can0 start
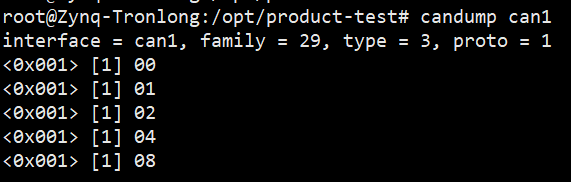
candump
指定 CAN 接口即可开始接收。这里与 cansend 程序的结合使用,板卡上的 CAN0 和 CAN1 使用连接线进行了对接。
TARGET# candump can1
canecho
板卡上的 CAN0 和 CAN1 使用连接线进行了对接。
TARGET# canecho can0

TARGET# candump can1 &
TARGET# cansend can1 '1'
下图中 send 发出一个 ‘1’,dump 收到了两个,第一个是 send 到 can1 时第一次直接 dump 了出来,第二个是 ‘1’通过外部连接线发送到了 can0,被 echo 接收然后往 can0 发出去,通过连接线发送到了 can1,此时再次被 dump 出来。

cansend
往指定接口发送数据。这里与 candump 程序的结合使用。
TARGET# cansend can0 '1'

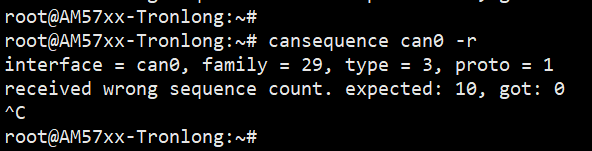
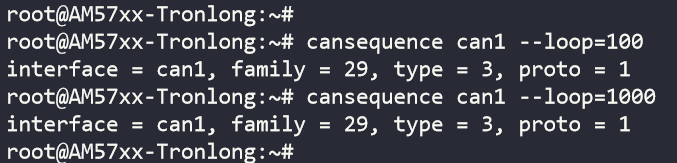
cansequence
以下演示向一个接口发送递增序列,从另一个接口接收并校验。当波特率 125000 时,可以看到有误码情况,降低波特率后就正常了。
代码解析
基于该工具的源码进行对 CAN 的学习,尤其是学习 Linux 下的 socket CAN 编程,是一个不错的办法。主要是 6 个文件,5 个程序对应 5 个 C 源码文件,以及一个 libsocketcan 库的源码文件。
头文件
包含的 Linux 系统的头文件,除开基本的如 unistd.h 等,还有涉及到 socket、interface、can 的头文件。从这里可以稍微看出 CAN 编程与 Linux 系统的关系。
libsocketcan 库
该库对 CAN 的底层配置以及查询进行了很好的封装,设计了专门的结构体和函数接口。在苛刻的功能要求下可以进行精细的 CAN 控制,一般情况下不需要。
这里的实现实际包含了 CAN 协议的定义。通过 rtnetlink 等系统接口融入到 Linux 的 socket 框架中。
5 个程序的代码逻辑
- canconfig 这个程序只是做了基本的参数解析,然后使用了 libsocketcan 库的接口进行实际配置,与状态获取。
- candump 除了参数解析,就是调用 socket()、bind()、read() 系统调用进行数据接收。然后如果参数指导写到文件,使用了 C 的 fopen、fprintf 进行数据写入。
- cansend 与 candump 相似,调用 socket()、bind()、write() 系统调用进行数据发送。
- canecho 相当于包含 candump 与 cansend。
- cansquence 可以与前面程序对比来看,无非也是读写,另外加一个 payload 序列递增与校验。
2020年3月31日