一天,我正在学校楼下撸猫,同学发来消息,他的实习老师给了他一个课题,大致的方向是对图片或者视频里面的目标进行识别,然后判断意图,而且举了个军事例子,两军交锋,现在根据无人机拍摄或者卫星图像,针对敌军坦克集团的阵型来分析敌军坦克的作战意图。但他对课题实现一脸懵逼,所以过来求救,我一听,真的好高大上啊!为发扬同学间团结有爱、互帮互助的精神,我就帮忙研究研究吧(每天一瓶饮料,做错了别怪我。。。。)
这样讲文章思路不清晰,我先画个流程图来描述一下我的工作,避免大家绕来绕去的看的发懵:
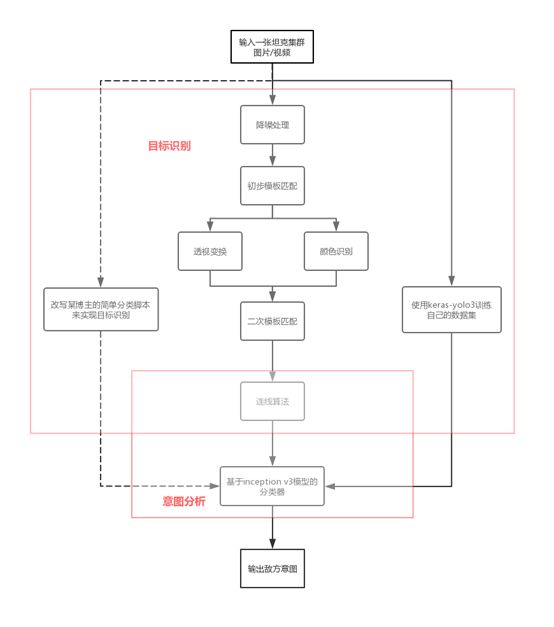
初步目标识别
同学说老师要他先实现这个目标识别,我脑子里第一时间想到了Python3里面处理图片的超强第三方库OpenCV,里面的模板匹配有好多算法可以用呢,比如平方差匹配、相关性匹配、相关性系数匹配还有匹配效果最好的标准相关匹配等等,然后模型的话最近正好在研究Unity写游戏,那就拿里面的坦克模型来测试,先来张截图测试下,一言不合上代码:

tpl =cv.imread(r"D://PythonPicTemplate/pythinPIC/tankTemplate2.jpg")
target = cv.imread("D://PythonPicTemplate/pythinPIC/tanks2.jpg")
cv.namedWindow('template image', cv.WINDOW_NORMAL)
cv.imshow("template image", tpl)
cv.namedWindow('target image', cv.WINDOW_NORMAL)
cv.imshow("target image", target)
#methods = [cv.TM_CCOEFF, cv.TM_CCOEFF_NORMED, cv.TM_CCORR,cv.TM_CCORR_NORMED, cv.TM_SQDIFF, cv.TM_SQDIFF_NORMED]
methods =[cv.TM_CCORR_NORMED ,cv.TM_CCORR_NORMED,cv.TM_CCORR_NORMED,cv.TM_CCORR_NORMED, cv.TM_CCORR_NORMED]
'''''''
差值平方和匹配 CV_TM_SQDIFF
标准化差值平方和匹配 CV_TM_SQDIFF_NORMED
相关匹配 CV_TM_CCORR
标准相关匹配 CV_TM_CCORR_NORMED
相关匹配 CV_TM_CCOEFF
标准相关匹配 CV_TM_CCOEFF_NORMED
'''
th, tw = tpl.shape[:2]
i =0
tl = []
br = []
for md in methods:
#print(md)
result = cv.matchTemplate(target, tpl, md)
min_val, max_val, min_loc, max_loc = cv.minMaxLoc(result)
if md == cv.TM_SQDIFF_NORMED:
tl.append(min_loc)
else:
tl.append(max_loc)
br.append((tl[i][0]+tw, tl[i][1]+th))
cv.rectangle(target, tl[i], br[i], (0, 0, 255), 2)
i += 1
cv.namedWindow("match-" + np.str(md), cv.WINDOW_NORMAL)
cv.imshow("match-" + np.str(md), target)
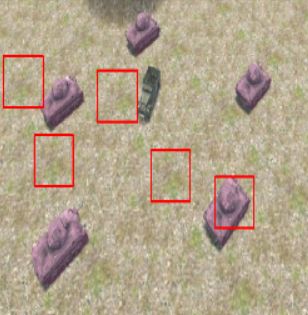
结果如下所示:

模板匹配的大致原理
模板匹配实现的思想也是很简单很暴力的,就是拿着模板图片在原图中从左上至右下依次滑动,直到遇到某个区域的相似度低于我们设定的阈值,那么我们就认为该区域与模板匹配了,并把它标记出来。但实验证明,模板配在原图抠出模板图的形式下准确率才比较高,不然的话可能准确度就不太高了。
综上所述,模板匹配的优点在于在模板的基础上能匹配的方便快速,但缺点实在是太多了,例如,
1.模板的大小会影响匹配的精度;
2.干扰现象严重,坦克藏在树林里很影响识别效果;
3.在实际运用中,模板的方向都必须要固定才能匹配成功;
4.以上都还好说,最重要的是我都知道模板了,那我还写代码在图片里识别个毛啊,对于这个课题直接圈出来不就行了。
所以我还是太天真了,模板匹配的优点要用,但目标识别的方法必须要改进一下,不然看着都傻,同学老师估计也会爆发。下一节我们继续研究具体的改进方法。
代码已上传至GitHub及Gitee,欢迎star,欢迎讨论:
GitHub:https://github.com/wangwei39120157028/Machine_Learning_research_on_simple_target_recognition_and_intention_analysis
Gitee:https://gitee.com/wwy2018/Machine_Learning_research_on_simple_target_recognition_and_intention_analysis/settings