CODESYS (V3.5 SP12 Patch)程序开发前的配置及简单应用 第 1 篇(长沙赛搏机器智能MIC7001总线控制器+松下A6BE总线驱动器)
在这个实例中,我会用CODESYS这个开发环境写一个简单的实例,我有一个总线控制器,用于控制两个松下总线伺服驱动器进而控制电机的运动,并写一个简单的控制界面。此外,这里还涉及到了驱动器相应的参数配置,这个不是今天的重点,下次有机会再说。
以下是主要的操作步骤及注意事项。
1、首先是CODESYS软件的安装,软件来源某度就有,按照提示直接安装就行,一般都没有问题的,安装完桌面便会有如下图所示的快捷方式。

2、安装控制器的设备描述文件。
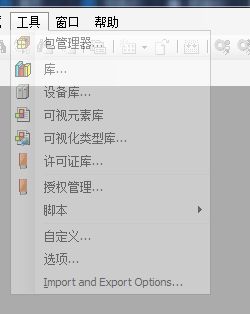
双击打开安装好的codesys开发环境,进入“工具”菜单栏,选择“设备库”
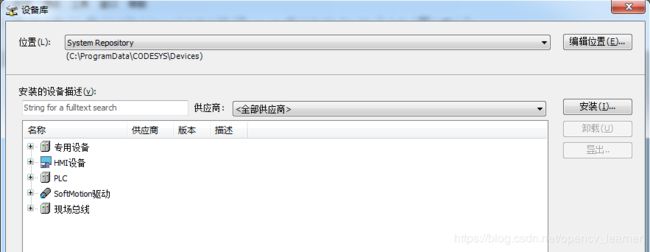

单击右侧的“安装”按钮,选择这个控制器的描述文件,注意有两个,全部安装。
3、安装总线驱动器的设备描述文件。跟常见的脉冲型驱动器不同的是,总线型的驱动器要能被控制器识别,必须安装相应的驱动器设备描述文件,这个文件在购买驱动器的时候要供应商提供,尽量要最新的,和第二部的操作相同,找到驱动器对应的描述文件进行安装,如下图所示。
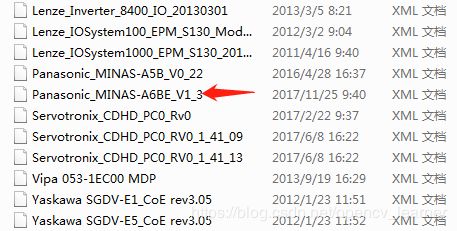
可以看到该文件夹里还有许多其他总线驱动器的描述文件,选择与自己驱动器型号对应的就好。
这个时候我们就可以在设备库里看到相应的设备了,可以看到专用设备里面多了一款控制器

再接着往下看,找到“现场总线”--“Ethercat”--“从站”,点开“从站”前面的“+”,可以发现里面多出了许多型号的松下驱动器

至此,设备的描述文件就安装完成了。接下来开始在这个开发环境中进行配置和编写控制程序。
4、新建工程,选择"Standard project"

单击确定,进入下一个选择界面,如下图所示
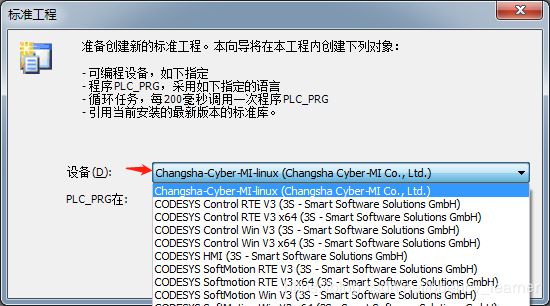
这里的设备选择我们之前安装的那个,这里用红色箭头标记了。
编程语言我这里选的是结构化文本,这个语言和C语言有些类似,工控领域相比梯形图那些,真是好太多了,不是吐槽梯形图,梯形图对于简单的控制,步数不太多的情况下用用还可以,复杂情况就用高级语言吧!如下图所示。

5、添加设备:总线控制器(主站)和总线驱动器(从站)
进入工程后,在左侧找到导航栏,右击“device”,选择“添加设备”

弹出如下的界面
选择专用设备下的IODrvMIC7001,单击“添加设备”进行添加
选择“现场总线”--“Ethercat”--“主站”--“Ethercat Master Softmotion”,单击“添加设备”进行添加

在左侧导航栏里可以看到多出了两个刚刚添加的设备

双击左侧导航栏中的“EtherCAT_Master_SoftMotion(EtherCAT_Master_SoftMotion)”,可以对主站进行相应的参数设置。
这里我修改了“网络名称”,单击“按名称选择网络”,并输入网络名称“eth0”,如下图所示

主站添加 完毕,接下来添加从站。当然,这个前提是已经有伺服驱动器通过超五类网线和控制器正常连接了,不然是没法通过扫描的方式添加从站驱动器的。
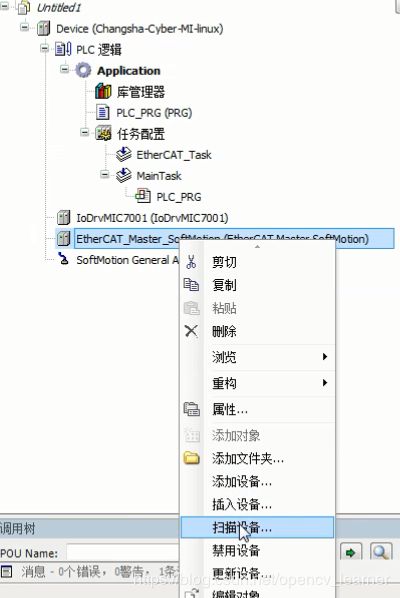
右击左侧导航栏的“EtherCAT_Master_SoftMotion(EtherCAT_Master_SoftMotion)”,选择“扫描设备”
可能会弹出如下界面

这说明没有选择网关,简要说说操作步骤:
首先电脑需要连接控制器,MIC7001控制器自身可以发出WiFi信号,电脑需要首先连接该WiFi
然后,双击左侧导航栏的“device”,出现如下界面,单击红色箭头标记的“scan network”,选择相应的控制型号即可

OK,连接到了网关了,再次进行从站的扫描,这次扫描到了两个从站,添加两个从站到网络中,右侧导航栏如下图所示,可以看到主站下面多出了两个我们刚刚添加的从站

分别给两个从站驱动器添加softmotion CiA402 Axis,如下图所示


给刚刚添加的轴进行重命名,对于弹出的窗口,直接按回车键确定就行:
SM_Drive_GenericDSP402(SM_Drive_GenericDSP402)修改为axis_0
SM_Drive_GenericDSP402_1(SM_Drive_GenericDSP402)修改为axis_1
如下图所示:

接下来还需要对电机的参数进行设置,双击导航栏中的“axis_0”,导航栏右侧弹出参数设置界面
“softmotion驱动:基本的”相关参数参考如下界面:

softmotion驱动:缩放/映射”相关参数参考如下界面:

“增量<=>电机转”左侧输入的是编码器的参数,编码器每转过一圈发出的脉冲数
“电机转动<=>齿轮输出转”左侧输入的是减速机的减速比
“减速机输出转<=>应用的单元”右侧输入360,这个参数跟电机转速有关系,具体含义待确定。
其他页面的参数默认即可。
至此,主站和从站的添加及参数的设置已经完成。
图有点多,显得比较长,第一部分就写到这里吧,第二部分将会写程序的开发部分。