Sift特征
说明:本篇博客只围绕sift描述子展开了学习。对于sift关键点检测涉及的内容并未进行详细的分析和学习。相关内容可参考本篇博客中的参考文献。
Sift特征
Sift特征包含两个部分,一个是关键点(frame或者keypoint),另外一个就是在关键点处的描述子(descriptor,或者Keypoint descriptor),更确切的说是关键点所在尺度空间的描述子。
很多文章中给出了两种尺度空间:高斯尺度空间GSS和高斯差分尺度空间DOG。可能会怀疑,到底描述子是在哪个尺度空间计算的?其实采用的是高斯尺度空间。如下图:GSS对图像使用[-1,4]不同尺度的高斯进行平滑得到图像,其索引号[-1,4]指明了不同的尺度,DOG索引号为[-1,3]只是表示与GSS索引号对应的关系,并且图中还给出了”DOG下极值的计算“的索引号,其为GSS的中间三个,即[0,2]。例如,如果我们在”DOG下极值的计算“,发现在其索引号为0尺度有满足条件的关键点,那么该关键点所处的尺度空间就是: s=0 的高斯尺度空间。
在面部特征点的检测中,经常提取Sift特征。这里的Sift特征指的就是Sift描述子,在一个点处提取的Sift特征一般为128维,即4*4*8=128,4*4表示4*4的区域,8表示每个区域统计的方向。
在Vfleat中:frame 表示Keypoint,descriptor 表示Keypoint descriptor
自定义关键点:
vl_sift函数可以自定义关键点,然后计算该关键点处的描述子。例如我们可以计算关键点在(100,100),尺度为10,方向为 −π8 的描述子:
fc=[100;100;10;-pi/8];
[f,d]=vl_sift(I,'frames',fc);我们不指定方向,使用关键点的方向,即将方向参数设置为0,并通过参数’orientations’指定,则:
fc=[100;100;10;0];
[f,d]=vl_sift(I,'frames',fc,'orientations');也可以将参数fc设置为矩阵的形式,一次计算多个关键点的描述子。特别的,一个关键点可能有多个方向,或者没有方向(图像区域为常数)
问题就来了,这里的尺度是什么?描述子的方向怎么计算的呢?如果方向是指描述子的主方向,那么通过直方图确定主方向时采用的邻域是多大呢?
如上面的函数,我们传入的尺度为10,是使用标准差为 σ=10 的高斯对图像进行平滑后,然后进行后面的处理吗?等等一连串的问题,使得我很模糊。
下图给出了高斯尺度示意图,其中左右表格内画红色的下划线的表示(这里我们下表都从0开始):第1层的第0个图像,是从第0层的第3个图像下采样得到,随后第1层的第1个图像是由第1层的第0个图像再经过高斯标准差为 σ2(1,0)−σ2(1,−1)−−−−−−−−−−−√ 的高斯平滑后得到的,以次类推。。。

Vlfeat库的配置:
Vlfeat的源程序使用C语言编写,读起来和使用起来也着实让人费力。由于Vlfeat给出了能够计算给定关键点的描述子的Matlab接口函数。那么我们Matlab入口运行程序进行学习分析。
Vlfeat提供的两个版本:
(1).vlfeat-0.9.20-bin.tar.gz (编译好的二进制文件)
(2).vlfeat-0.9.20 (源文件)
1.下载完vlfeat-0.9.20后,将其解压到当前文件夹,在目录下,有个Makefile.mak文件。使用写字板或者Notepad打开,该文件内给出了需要修改的详细说明,即Customization(定制)部分。
# Customization
# --------------------------------------------------------------------
# To modify this script to run on your platform it is usually
# sufficient to modify the following variables:
#
# ARCH: Either win32 or win64 [win64]
# DEBUG: Set to yes to ativate debugging [no]
# MATLABROOT: Path to MATLAB
# MSVSVER: Visual Studio version (e.g. 80, 90, 100) [90 for VS 9.0]
# MSVCROOT: Visual C++ location [$(VCInstallDir)].
# WINSDKROOT: Windows SDK location [$(WindowsSdkDir)]
#
# Note that some of these variables depend on the architecture
# (either win32 or win64).修改截图如下:

我们电脑上装了两个Matlab,R2014a是32位的,R2014b是64位的。
2.
方法1:双击vlfeat.vcproj打开,进入VS2010界面,点击直到完成后,在左侧的解决方案一栏,对vlfeat进行编译,即build即可。
方法2:在电脑程序目录下,找到Visio Studio Tools找到类似于Visual Studio x64 Win64 命令提示(2010)的工具,点击运行,然后在dos下,将目录切换到vlfeat-0.9.20目录,然后利用nmake命令:
nmake /f Makefile.mak3.目的:将mex.c文件编译成供Matlab调用的二进制文件。
打开Matlab,将工程目录切换到vlfeat-0.9.20\toolbox目录下,首先修改一下vl_compile.m文件,即将mex -o,修改为mex -g,如下:

调试Sift源文件
1.打开Matlab,当然首先是要设置好包含路径,主页-设置路径-添加并包含子文件夹,将vlfeat-0.9.20添加进去。我为了省事,一般都是直接将所有的添加进去,你可以选择只需要将toolbox/mex添加到Matlab路径中。然后书写简单的代码:
%clc;clearvars;
% prepare data
imgPath='E:\data\lfw\imgs\Aaron_Eckhart\Aaron_Eckhart_0001.jpg';
bbox=[63 72 126+63 126+72];
landmark=[34 35; 53 38; 41 86; 75 90; 58 93; 59 87 ;72 40 ;94 43; 48 70; 72 72];
nlandmark=10;
isShow=false;
for i=1:nlandmark
landmark(i,1)=landmark(i,1)+bbox(1);
landmark(i,2)=landmark(i,2)+bbox(2);
end
if isShow
figure(1);
subplot(2,1,1);
img=imread(imgPath);
img_gray=rgb2gray(img);
imshow(img_gray);
hold on;
for i=1:nlandmark
plot(landmark(i,1),landmark(i,2),'.r','markersize',8);
end
% for box;
rmpath('E:\matlabworkplace\headpose_with_block\third_part\vlfeat-0.9.20\toolbox\noprefix');
plotbox(bbox,'r');
addpath('E:\matlabworkplace\headpose_with_block\third_part\vlfeat-0.9.20\toolbox\noprefix');
end
% I = vl_impattern('roofs1') ;
% image(I) ;
% I = single(rgb2gray(I)) ;
% [f,d] = vl_sift(I) ;
% perm = randperm(size(f,2)) ;
% sel = perm(1:50) ;
% h1 = vl_plotframe(f(:,sel)) ;
% h2 = vl_plotframe(f(:,sel)) ;
% set(h1,'color','k','linewidth',3) ;
% set(h2,'color','y','linewidth',2) ;
pi=3.1415926;
img=imread(imgPath);
figure(1);
%subplot(1,2,1);
image(img);
img_gray=rgb2gray(img);
I=single(img_gray);
hold on;
ori=[pi/8 2*pi/8 3*pi/8 4*pi/8 5*pi/8 6*pi/8 7*pi/8 pi -pi/8 -2*pi/8];
%scale=[1 2 3 4 5 6 7 8 9 10];
scale=[1.6 1.6 1.6 1.6 1.6 1.6 1.6 1.6 1.6 1.6];
for i=1:10
plot(landmark(i,1),landmark(i,2),'.r','markersize',16);
fc=[landmark(i,1);landmark(i,2);scale(i);ori(i)];
[f,d]=vl_sift(I,'frames',fc);
h1=vl_plotframe(f(:,1));
h2=vl_plotframe(f(:,1));
set(h1,'color','k','linewidth',3);
set(h2,'color','y','linewidth',2);
name=num2str(i);
text(landmark(i,1),landmark(i,2),name);
end
%%上面的代码可以不需要,只需要下面的代码。
figure(2);
img2 = vl_impattern('roofs1') ;
image(img2) ;
img2 = single(rgb2gray(img2)) ;
[f,d] = vl_sift(img2) ;
perm = randperm(size(f,2)) ;
sel = perm(1:50) ;
h1 = vl_plotframe(f(:,sel)) ;
h2 = vl_plotframe(f(:,sel)) ;
set(h1,'color','k','linewidth',3) ;
set(h2,'color','y','linewidth',2) ;
h3 = vl_plotsiftdescriptor(d(:,sel),f(:,sel)) ;
set(h3,'color','g') ;
2.打开VS2010,通过菜单中的文件-打开-文件,将vlfeat-0.9.20\toolbox\sift下的vl_sift.c和vlfeat-0.9.20\vl下的sift.c添加到VS中,然后在两个文件中,设置断点就可以了。
3.在VS2010中设置为断点后,在VS菜单中工具-附加到进程,在可用进程中找到Matlab,然后双击即可。
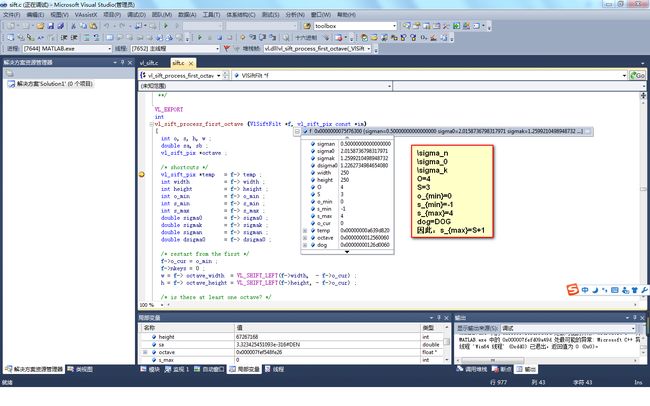
4.运行Matlab程序,会自动跳转到VS2010设置的断点处,通过F5进行断点的切换。如下图:
参数说明
公式1:
其中 gσ 是各向同性高斯核,方差为 σ2I 。
公式2:
注意这里的 s∈[0,...,S−1] 也着实让人迷惑的,你会在后面看到文章中又有 s∈[smin,smax] ,其中 smin=−1 , smax=S+1
| 变量 | 描述 |
|---|---|
| NumOctaves | octaves的数目-O |
| FirstOctave | 第一个octave的索引: omin ,octave的索引范围为 omin ,…, omin +O-1,通常为0或者-1.将 omin 设置为-1,就是 在计算高斯尺度空间时,将图像长宽扩大一倍的效果 。 |
| NumLevels | 子层的数量-S |
| Sigma0 | 基平滑 Base smoothing |
| SigmaN | 称为预平滑:这是输入图像的预平滑水平。算法假定输入图像实际上不是 I(x) ,而是 (gσn∗I)(x) ,调整计算的依据,通常假定 σn 是半个像素(0.5)。因此在后面的计算高斯金字塔时,我们想使用初始的 σ0=1.6 进行高斯平滑,但是由于图像假定已经不是纯的 I ,而是进行了 σn 的平滑,因此,我们只需要在进行 σ02−σn2−−−−−−−−√ 的高斯平滑就够了,其等价于原始的纯的I经过方差为 σ0 的高斯平滑。就像别的文章讲的那样,如果初始的o=-1,即将原图像进行了double,即长和宽扩大了两倍,那么此时的 σn 取1 |
检测器参数:
SIFT frame(即关键点)是差分尺度空间的局部极值点。这样的点的选择通过下面的参数控制:
| 变量 | 描述 |
|---|---|
| Thread | 局部极值点阈值, 如果局部极值点的 |G(x;σ)| 小于该阈值,则去掉 |
| EdgeThreshold | 局部极值定位阈值,如果局部极值点在一个山谷上,算法丢掉该极值点,因为它太不稳定了。如果极值的得分正比于其陡峭程度,并且得分又小于这个阈值的话,则丢掉该极值点 |
| RemoveBoundaryPoints | 边界点的移除,如果这个参数设置为1(即true),太接近图像边界的关键点将被移除。 |
描述子参数:
SIFT描述子是一个带有权重和插值的直方图,其利用梯度方向和关键点周围的块区域的位置进行计算。描述子有下面的参数:
| 变量 | 描述 |
|---|---|
| Magnif | 放大因子或者放大倍数m,直方图的每一个空间bin的大小为 mσ (单位为像素),其中 σ 是该关键点处的尺度,m一般取3. |
| NumSpatialBins | 空间bin的数量,和下面的NumOrientBins参数一起,定义了描述子的扩展和维度。描述子的维度(bins的总数量)等于 NumSpatialBins2×NumOrientBins ,描述子的扩展(即直方图统计区域(块))的半径为 NumSpatialBins×mσ/2 ),例如一般为NumSpatialBins=4,NumOrientBins=8,则为4*4*8=128,即描述子的维度 |
| NumOrientBins | 方向bins的数目 |
代码的分析
高斯模板
一维高斯:
二维高斯:
其中 I 是2*2的单位阵。 x,y 具有同样的标准差 σ 。
从上面的公式,直观上我们感觉二维高斯卷积操作可以分解为分别经过 x,y 方向的一维操作。这里的“卷积”相当于“相关”。其中 x,y 表示与模板中心的位移。
证明:
其中
而:
平滑的高斯模板是多大的呢?即多少个像素呢?其是否与现在使用的高斯标准差(即尺度 σ )有关呢?
代码中给出了计算:
高斯模板的宽度= max(⌈4∗σ⌉,1) ,这里的宽度是半径,例如对于5*5,则宽度为2,对于7*7,则宽度为3,因此高斯模板的大小为:
static void
_vl_sift_smooth (VlSiftFilt * self,
vl_sift_pix * outputImage,
vl_sift_pix * tempImage,
vl_sift_pix const * inputImage,
vl_size width,
vl_size height,
double sigma)
{
/* prepare Gaussian filter */
if (self->gaussFilterSigma != sigma) {
vl_uindex j ;
vl_sift_pix acc = 0 ;//vl_sift_pix即float
if (self->gaussFilter) vl_free (self->gaussFilter) ;
self->gaussFilterWidth = VL_MAX(ceil(4.0 * sigma), 1) ;
self->gaussFilterSigma = sigma ;//$\sigma$
self->gaussFilter = vl_malloc (sizeof(vl_sift_pix) * (2 * self->gaussFilterWidth + 1)) ;//高斯滤波器,二维滤波可以等价分别x方向一维滤波,然后y方向的一维滤波,或者反过来。
for (j = 0 ; j < 2 * self->gaussFilterWidth + 1 ; ++j) {
vl_sift_pix d = ((vl_sift_pix)((signed)j - (signed)self->gaussFilterWidth)) / ((vl_sift_pix)sigma) ;//到高斯模板中心的偏移
self->gaussFilter[j] = (vl_sift_pix) exp (- 0.5 * (d*d)) ;//这里并不需要乘以\frac{1}{\sqrt{2\pi\sigma}},因为每一项都有同样的。
acc += self->gaussFilter[j] ;
}
for (j = 0 ; j < 2 * self->gaussFilterWidth + 1 ; ++j) {
self->gaussFilter[j] /= acc ;//将高斯权重归一化,使其和为1
}
}
if (self->gaussFilterWidth == 0) {
memcpy (outputImage, inputImage, sizeof(vl_sift_pix) * width * height) ;
return ;
}
//进行一维卷积操作
vl_imconvcol_vf (tempImage, height,
inputImage, width, height, width,
self->gaussFilter,
- self->gaussFilterWidth, self->gaussFilterWidth,
1, VL_PAD_BY_CONTINUITY | VL_TRANSPOSE) ;
vl_imconvcol_vf (outputImage, width,
tempImage, height, width, height,
self->gaussFilter,
- self->gaussFilterWidth, self->gaussFilterWidth,
1, VL_PAD_BY_CONTINUITY | VL_TRANSPOSE) ;
}
例如
尺度 σ=1.6 ,则进行标准差为 σ2−σ2n−−−−−−−√=1.5199 的高斯平滑,即利用 G1.5199(x,y) 对图像 I 进行平滑,其中高斯模板的大小,通过上面的红色求得为7*7。计算描述子实际窗口的区域的大小为:
考虑到像素的加权和插值,因此在上面公式加上1(下面有详解,并可参考下面的 空间差值图)。乘以 2√ 是考虑到块区域的旋转。变成:
附录:
两个高斯函数的卷积仍然为一个高斯函数,满足方差为两个高斯函数之和,即:
因为二维高斯可以分解为分别进行x方向的一维高斯和y方向的一维高斯。所以这里只推导一维的情况。为了描述的统一和简洁,我们用小写的 g1(x) 来表示一维高斯。
参考: http://blog.csdn.net/liguan843607713/article/details/42215965
一维高斯:
我们令 f(x) 表示两个高斯函数的卷积,即:
我们写出完整的式子:
我们发现 e−at2 可以通过下面的形式计算:
而和 ebt 的定积分都没法求解。因此,我们利用变量代换的形式,将 ebt 的形式进行消掉,公式(1)转变为:
上面是一维连续高斯的卷积的证明。因此在取高斯窗口大小时采用了:
就是为了近似的满足上面卷积的要求。即高斯积分的取值范围为( −∞,+∞ ),即涵盖了高斯的所有取值。而满足上面的大小的窗口能够涵盖高斯的主要取值,所以在离散的空间,经过 σ2 高斯平滑, 近似的等价于先经过 σ1 的高斯平滑,在经过 σ22−σ21−−−−−−−√ 的高斯平滑(注意这里的 σ2>σ1 )。
sift描述子的计算

上面的图片来至于:《图像局部不变性特征与描述》,其很好的描述了当前图像所在的尺度和实际像素大小的关系。 Bp 就是上面描述的NumSpatialBins, m=3 :
下面是VLFeat中描述子计算的代码:
Since weighting and interpolation of pixel is used, the support extends by another half bin.
因为使用了像素的加权和插值,支撑范围扩展了半个bin的像素大小。
下图描述了两种度量单位:1 bin为单位,以及像素单位。1bin= mσ ,其中在计算插值时,采用的像素空间为连续的取值。
空间插值:
下图右侧给出了空间方向的插值,其中大小为4*4的空间bin,图中长度的度量方式均是采用1个bin为单位。黄色的点表示当前的像素点,都带有:空间位置,梯度和梯度方向属性,其有4个邻域,其中绿色的点表示每个bin的中心,灰色的点不在bin的范围内。
方向插值:
下图,左侧给出了一个空间bin中的方向的直方图统计(采用梯度幅值进行了加权,看箭头),其中170表示当前某个像素处的梯度方向,其介于157.5和202.5(分别对应于每个bin的中心)之间,那么该像素的梯度在这两个方向bin上的加权分别为w1和w2,w1=(170-157.5)/45,w2=1-w1,其中45为bin的宽度。即将360分成8个bin,每个bin的宽度为45.
对于一个像素(即当前关键点所在的尺度图像中的一个像素),其空间位置确定了其有4个邻域,其方向确定了其有2个方向的邻域。因此共4*2=8个邻域。即利用该像素的梯度对4个相邻空间bin的每两个方向bin进行加权。
有兴趣的话,可以将空间插值和方差插值画在一起,即画在一个三维图中。

上图,空间插值图有误,下图为修改后

其中dx,dy是相对于黄色点左上角中心(绿色)的距离。
VL_EXPORT
void
vl_sift_calc_keypoint_descriptor (VlSiftFilt *f,
vl_sift_pix *descr,
VlSiftKeypoint const* k,
double angle0)
{
/*
The SIFT descriptor is a three dimensional histogram of the
position and orientation of the gradient. There are NBP bins for
each spatial dimension and NBO bins for the orientation dimension,
for a total of NBP x NBP x NBO bins.
The support of each spatial bin has an extension of SBP = 3sigma
pixels, where sigma is the scale of the keypoint. Thus all the
bins together have a support SBP x NBP pixels wide. Since
weighting and interpolation of pixel is used, the support extends
by another half bin. Therefore, the support is a square window of
SBP x (NBP + 1) pixels. Finally, since the patch can be
arbitrarily rotated, we need to consider a window 2W += sqrt(2) x
SBP x (NBP + 1) pixels wide.
*/
double const magnif = f-> magnif ;//3,放大倍数m
double xper = pow (2.0, f->o_cur) ;//步长,针对原图像为250,250的话,如果当前的octave是0,则步长为1,如果octave=1,则步长为2,就是遍历“原图像大小”(不是原图像)的步长
int w = f-> octave_width ;//250
int h = f-> octave_height ;//250
int const xo = 2 ; /* x-stride *///其将梯度和方向封装在一个数组中,两两间隔,所以步长为2
int const yo = 2 * w ; /* y-stride */
int const so = 2 * w * h ; /* s-stride *///遍历下一个高斯尺度图像s的步长
double x = k-> x / xper ;//关键点的位置
double y = k-> y / xper ;
double sigma = k-> sigma / xper ;//当前的高斯尺度图像对应的尺度,我设置的参数为1.6(针对已知关键点,求描述子的情况)
int xi = (int) (x + 0.5) ;
int yi = (int) (y + 0.5) ;
int si = k-> is ;//有可能是高斯差分对应的索引
double const st0 = sin (angle0) ;//pi/2-传入的角度pi/8,这里的angle0应该是夹角。
double const ct0 = cos (angle0) ;
double const SBP = magnif * sigma + VL_EPSILON_D ;//m*\sigma 即1个bin的像素大小
int const W = floor
(sqrt(2.0) * SBP * (NBP + 1) / 2.0 + 0.5) ;//窗口的半径,这里为17,即$\sigma \frac{B_p+1}{2}{\sqrt{2}$,也就是图中外接圆的半径
int const binto = 1 ; /* bin theta-stride *///存储的方向bin步长
int const binyo = NBO * NBP ; /* bin y-stride *///8*4
int const binxo = NBO ; /* bin x-stride *///8
int bin, dxi, dyi ;
vl_sift_pix const *pt ;
vl_sift_pix *dpt ;
/* check bounds *///检测边界
if(k->o != f->o_cur ||
xi < 0 ||
xi >= w ||
yi < 0 ||
yi >= h - 1 ||
si < f->s_min + 1 || //0<=si<=2
si > f->s_max - 2 )
return ;
/* synchronize gradient buffer *///计算当前octave下,关键点所在的三个尺度(s0,s1,s2)图像上的梯度。问题来了,梯度的计算不是在旋转到主方向在计算吗?
update_gradient (f) ;
/* VL_PRINTF("W = %d ; magnif = %g ; SBP = %g\n", W,magnif,SBP) ; */
/* clear descriptor */
memset (descr, 0, sizeof(vl_sift_pix) * NBO*NBP*NBP) ;//为描述子分配空间,大小为8*4*4=128,descr描述子的首地址
/* Center the scale space and the descriptor on the current keypoint.//
* Note that dpt is pointing to the bin of center (SBP/2,SBP/2,0).
*/
pt = f->grad + xi*xo + yi*yo + (si - f->s_min - 1)*so ;//指向关键点处梯度的指针
dpt = descr + (NBP/2) * binyo + (NBP/2) * binxo ;//指向了描述子的中心,(即直方图的统计中心)binyo表示一行空间bin包括了方向bin,即y_0_即4*8。
#undef atd //at已知dbinx,dbiny,dbint定位其元素值在数组中的位置
#define atd(dbinx,dbiny,dbint) *(dpt + (dbint)*binto + (dbiny)*binyo + (dbinx)*binxo)
/*
* Process pixels in the intersection of the image rectangle
* (1,1)-(M-1,N-1) and the keypoint bounding box.
*/
//处理边框[-17 17]中的每一个像素
for(dyi = VL_MAX (- W, 1 - yi ) ;
dyi <= VL_MIN (+ W, h - yi - 2) ; ++ dyi) {
for(dxi = VL_MAX (- W, 1 - xi ) ;
dxi <= VL_MIN (+ W, w - xi - 2) ; ++ dxi) {
/* retrieve *///pt指向了关键点处的梯度指针
vl_sift_pix mod = *( pt + dxi*xo + dyi*yo + 0 ) ;//梯度
vl_sift_pix angle = *( pt + dxi*xo + dyi*yo + 1 ) ;//角度//梯度和角度存储在同一个数组中,相互间隔,所以+1就可以遍历到
vl_sift_pix theta = vl_mod_2pi_f (angle - angle0) ;//如果angle0为主方向的化,angle-angle0相当于该像素的方向与主方向之间的夹角或者差值
/* fractional displacement */ 关键点离散像素位置和精确位置的偏移
vl_sift_pix dx = xi + dxi - x;
vl_sift_pix dy = yi + dyi - y;
/* get the displacement normalized w.r.t. the keypoint,关于方向和扩展进行标准化,即除以SBP,表示转换为以1bin为单位,即转换到1bin为单位的衡量空间,方向:theta/(2pi/8),角度也是以45bin长为单位,只是换成了弧度制。
orientation and extension */
vl_sift_pix nx = ( ct0 * dx + st0 * dy) / SBP ;
vl_sift_pix ny = (-st0 * dx + ct0 * dy) / SBP ;
vl_sift_pix nt = NBO * theta / (2 * VL_PI) ;
/* Get the Gaussian weight of the sample. The Gaussian window
* has a standard deviation equal to NBP/2. Note that dx and dy
* are in the normalized frame, so that -NBP/2 <= dx <=
* NBP/2. */
vl_sift_pix const wsigma = f->windowSize ;//2,即NBP的一半
vl_sift_pix win = fast_expn
((nx*nx + ny*ny)/(2.0 * wsigma * wsigma)) ;//高斯加权,采用的是标准化到1bin为单位的空间,
/* The sample will be distributed in 8 adjacent bins.
//以空间插值图中最左边的黄色像素为例,其大约的位置为(nx,ny)=(-0.75,-1.35), theta=pi/4,nt=0.617那么
//binx=floor(-0.75-0.5)=-2;左上角的点
//biny=floor(-1.35-0.5)=-2;左上角的点,
//bint=1;弧度
//rbinx=-0.75-(-2+0.5)=-0.75+1.5=0.75;//其中(-2+0.5)定位(-2,-2)对应的bin的中心的x坐标。-0.75-(-2+0.5)表示黄色的点的x坐标到bin的中心点的x坐标之间的距离。
//rbiny=-1.35-(-2+0.5)=-1.35+0.5=0.15;//同上,(-2+0.5)定位(-2,-2)对应的bin的中心的y坐标,-1.35-(-2+0.5)表示黄色的点的y坐标到bin的中心点的y坐标的距离。
//rbint=0.617-1=0.383
//我们知道黄色点所在的bin的中心(蓝色点)的坐标为:(-0.5,-1.5),则dx=0.25,dy=0.15.
We start from the ``lower-left'' bin. */
int binx = (int)vl_floor_f (nx - 0.5) ;
int biny = (int)vl_floor_f (ny - 0.5) ;
int bint = (int)vl_floor_f (nt) ;
vl_sift_pix rbinx = nx - (binx + 0.5) ;
vl_sift_pix rbiny = ny - (biny + 0.5) ;
vl_sift_pix rbint = nt - bint ;
int dbinx ;
int dbiny ;
int dbint ;
/* Distribute the current sample into the 8 adjacent bins*/
//例如空间插值图中,最左边的黄色点,其binx指向(-2,-2)所在的左上角的bin,那么binx+dbinx=binx+0,则表示还是指向该bin,而binx+dbinx=binx+1,则表示指向的黄色点所在的bin,对于binxy同理。再比如,最右边的黄色的点,计算的binx值应该是它所在的bin...
for(dbinx = 0 ; dbinx < 2 ; ++dbinx) {
for(dbiny = 0 ; dbiny < 2 ; ++dbiny) {
for(dbint = 0 ; dbint < 2 ; ++dbint) {
if (binx + dbinx >= - (NBP/2) &&
binx + dbinx < (NBP/2) &&
biny + dbiny >= - (NBP/2) &&
biny + dbiny < (NBP/2) ) {
vl_sift_pix weight = win
* mod
* vl_abs_f (1 - dbinx - rbinx)
* vl_abs_f (1 - dbiny - rbiny)
* vl_abs_f (1 - dbint - rbint) ;
atd(binx+dbinx, biny+dbiny, (bint+dbint) % NBO) += weight ;//数组下标的离散。例如a[-2]就不是当前指针a,向前移动两步。
}
}
}
}
}
}
/* Standard SIFT descriptors are normalized, truncated and normalized again */
if(1) {
/* Normalize the histogram to L2 unit length. */
//descr描述子的首地址,descr+NBO*NBP*NBP描述子的尾地址
vl_sift_pix norm = normalize_histogram (descr, descr + NBO*NBP*NBP) ;
/* Set the descriptor to zero if it is lower than our norm_threshold *///我们这里norma_thresh=0,norm为258
if(f-> norm_thresh && norm < f-> norm_thresh) {
for(bin = 0; bin < NBO*NBP*NBP ; ++ bin)
descr [bin] = 0;
}
else {
/* Truncate at 0.2. */
//不能超过0.2
for(bin = 0; bin < NBO*NBP*NBP ; ++ bin) {
if (descr [bin] > 0.2) descr [bin] = 0.2;
}
/* Normalize again. */再次进行标准化
normalize_histogram (descr, descr + NBO*NBP*NBP) ;
}
}
}
上面的代码给出加权的计算公式:
vl_sift_pix weight = win
* mod
* vl_abs_f (1 - dbinx - rbinx)
* vl_abs_f (1 - dbiny - rbiny)
* vl_abs_f (1 - dbint - rbint) ;其中:
所以最后的公式为(为了书写的美观,将 dx 写为 dx , dy,do 类似):
其中: i,j,k∈{0,1},σ 是当前关键点所在的图像尺度。 x0,y0 的单位像素;x,y的单位为1bin(空间bin,范围为[-2,2],x轴方向,长度为4,y轴方向长度为4,1bin= 3σ 像素; dx,dy 的单位也是1bin; do 的单位为1bin(但是是方向bin,bin的范围为[0,8],长度为8,1bin= 2π8=0.25π弧度 )。从 x0.y0 到 x,y 通过仿射映射和坐标单位换算得到。
VLFeat代码中给出图像旋转后的坐标的计算公式为:
D.Lowe’s sift实现中的计算公式:
之所有会出现上面的差别,是因为选用了不同的坐标系和角度的旋转规则:
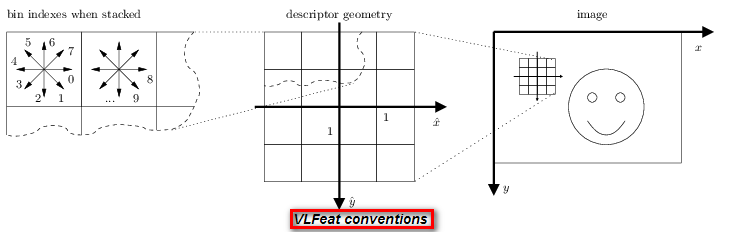
下图给出VLFeat实现的约定规则和D.Lowes实现的约定规则:

其中VLFeat的代码中,对于输入主方向,例如为 −π/8 ,其进行了下面的操作:
angles [0] = VL_PI / 2 - ikeys [4 * i + 3] ;%ikeys[4*i+3]=-pi/8即:
下图给出了详细操作的解释:
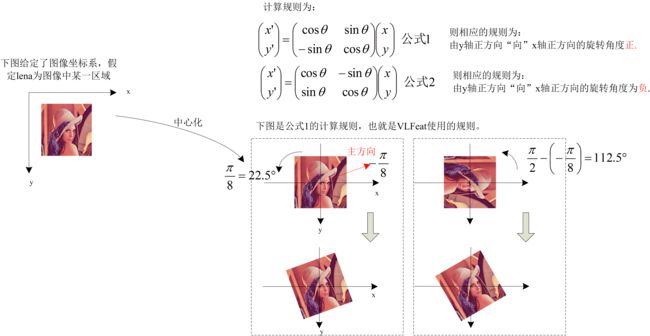
坐标的虚线框内描述了理论上的计算过程,右边虚线框内描述了实际的计算过程,因为Matlab矩阵的存储方式是按列存储的,而c是按行存储的,所以在C中处理的图像其实是实际图像的转置。
sift描述子主方向的计算
这里给出了代码:
VL_EXPORT
int
vl_sift_calc_keypoint_orientations (VlSiftFilt *f,
double angles [4],
VlSiftKeypoint const *k)
{
double const winf = 1.5 ;
double xper = pow (2.0, f->o_cur) ;
int w = f-> octave_width ;
int h = f-> octave_height ;
int const xo = 2 ; /* x-stride */
int const yo = 2 * w ; /* y-stride */
int const so = 2 * w * h ; /* s-stride */
double x = k-> x / xper ;
double y = k-> y / xper ;
double sigma = k-> sigma / xper ;
int xi = (int) (x + 0.5) ;
int yi = (int) (y + 0.5) ;
int si = k-> is ;
double const sigmaw = winf * sigma ;
int W = VL_MAX(floor (3.0 * sigmaw), 1) ;
int nangles= 0 ;
enum {nbins = 36} ;
double hist [nbins], maxh ;
vl_sift_pix const * pt ;
int xs, ys, iter, i ;
/* skip if the keypoint octave is not current */
if(k->o != f->o_cur)
return 0 ;
/* skip the keypoint if it is out of bounds */
if(xi < 0 ||
xi > w - 1 ||
yi < 0 ||
yi > h - 1 ||
si < f->s_min + 1 ||
si > f->s_max - 2 ) {
return 0 ;
}
/* make gradient up to date */
update_gradient (f) ;
/* clear histogram */
memset (hist, 0, sizeof(double) * nbins) ;
/* compute orientation histogram */
pt = f-> grad + xo*xi + yo*yi + so*(si - f->s_min - 1) ;
#undef at
#define at(dx,dy) (*(pt + xo * (dx) + yo * (dy)))
for(ys = VL_MAX (- W, - yi) ;
ys <= VL_MIN (+ W, h - 1 - yi) ; ++ys) {
for(xs = VL_MAX (- W, - xi) ;
xs <= VL_MIN (+ W, w - 1 - xi) ; ++xs) {
double dx = (double)(xi + xs) - x;
double dy = (double)(yi + ys) - y;
double r2 = dx*dx + dy*dy ;
double wgt, mod, ang, fbin ;
/* limit to a circular window */
if (r2 >= W*W + 0.6) continue ;
wgt = fast_expn (r2 / (2*sigmaw*sigmaw)) ;
mod = *(pt + xs*xo + ys*yo ) ;
ang = *(pt + xs*xo + ys*yo + 1) ;
fbin = nbins * ang / (2 * VL_PI) ;
#if defined(VL_SIFT_BILINEAR_ORIENTATIONS)
{
int bin = (int) vl_floor_d (fbin - 0.5) ;
double rbin = fbin - bin - 0.5 ;
hist [(bin + nbins) % nbins] += (1 - rbin) * mod * wgt ;
hist [(bin + 1 ) % nbins] += ( rbin) * mod * wgt ;
}
#else
{
int bin = vl_floor_d (fbin) ;
bin = vl_floor_d (nbins * ang / (2*VL_PI)) ;
hist [(bin) % nbins] += mod * wgt ;
}
#endif
} /* for xs */
} /* for ys */
/* smooth histogram */
for (iter = 0; iter < 6; iter ++) {
double prev = hist [nbins - 1] ;
double first = hist [0] ;
int i ;
for (i = 0; i < nbins - 1; i++) {
double newh = (prev + hist[i] + hist[(i+1) % nbins]) / 3.0;
prev = hist[i] ;
hist[i] = newh ;
}
hist[i] = (prev + hist[i] + first) / 3.0 ;
}
/* find the histogram maximum */
maxh = 0 ;
for (i = 0 ; i < nbins ; ++i)
maxh = VL_MAX (maxh, hist [i]) ;
/* find peaks within 80% from max */
nangles = 0 ;
for(i = 0 ; i < nbins ; ++i) {
double h0 = hist [i] ;
double hm = hist [(i - 1 + nbins) % nbins] ;
double hp = hist [(i + 1 + nbins) % nbins] ;
/* is this a peak? */
if (h0 > 0.8*maxh && h0 > hm && h0 > hp) {
/* quadratic interpolation */
double di = - 0.5 * (hp - hm) / (hp + hm - 2 * h0) ;
double th = 2 * VL_PI * (i + di + 0.5) / nbins ;
angles [ nangles++ ] = th ;
if( nangles == 4 )
goto enough_angles ;
}
}
enough_angles:
return nangles ;
}
计算描述子方向的窗口大小为: w=max(⌊3∗(winf∗σ)⌋,1) ,其中 winf=1.5,σ 为当前关键点所在的尺度,本例中w=7,即 σ 取1.6。其将360度的方向划成了36个bin(为了确定更精确的方向)。这里是为了计算主方向,在尺度图像上进行梯度,而不需要仿射变换。
高斯金字塔图像
在Vlfeat的vl_sift.cpp中(为了使用opencv,mexopencv,我们将其改为了cpp文件)中添加如下的代码,输出保存高斯图像金字塔。
if (first) {
err = vl_sift_process_first_octave (filt, data) ;
//add my code,out[2]对图像进行输出
int smax=4;
int smin=-1;
int ns=smax-smin+1;
vl_sift_pix *oct0 = filt->octave ;
int o=vl_sift_get_octave_index (filt);
Mat mat0(M*N,ns,CV_8UC1);
for(int k=0;kint st=k*M*N;
for(int jj=0;jjfor(int ii=0;ii0.at(ii+jj*N,k)=(uchar)oct0[ii+jj*N+st];
}
out[o+2]=MxArray(mat0);
first = 0 ;
} else {
err = vl_sift_process_next_octave (filt) ;
//add my code,out[2]对图像进行输出
int smax=4;
int smin=-1;
int ns=smax-smin+1;
vl_sift_pix *oct0 = filt->octave ;
int o=vl_sift_get_octave_index (filt);
int m=M/(pow(2.0,o));
int n=N/(pow(2.0,o));
Mat mat0(m*n,ns,CV_8UC1);
for(int k=0;kint st=k*m*n;
for(int jj=0;jjfor(int ii=0;ii<m;ii++)//M表示行数
mat0.at(ii+jj*n,k)=(uchar)oct0[ii+jj*n+st];
}
out[o+2]=MxArray(mat0);
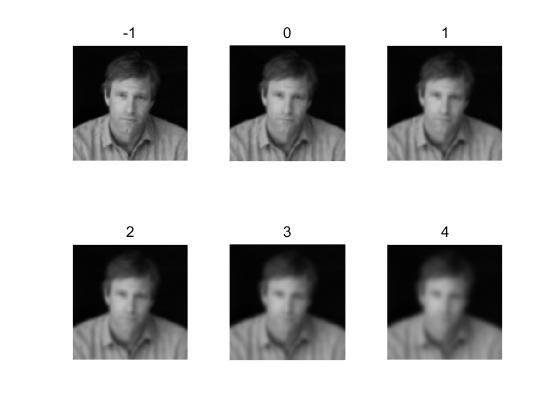
} 下图给出了,4个octave的第一个s的图像:

下图给出了第一个octave下的6个尺度图像:
VLFeat中计算给定关键点的描述子时间测试
clearvars;close all;
imgPath='E:\data\lfw\imgs\Aaron_Eckhart\Aaron_Eckhart_0001.jpg';
bbox=[63 72 126+63 126+72];
landmark=[34 35; 53 38; 41 86; 75 90; 58 93; 59 87 ;72 40 ;94 43; 48 70; 72 72];
nlandmark=10;
sigma=0.5;
ori=0;
img=imread(imgPath);
img_gray=rgb2gray(img);
I=single(img_gray);
%% 批量处理
tic;
w=bbox(3)-bbox(1)+1;
h=bbox(4)-bbox(2)+1;
fc=zeros(4,w*h);
for i=bbox(1):bbox(3)
for j=bbox(2):bbox(4)
fc_t=[i;j;sigma;ori];
ii=i-bbox(1)+1;
jj=j-bbox(2)+1;
fc(:,jj+(ii-1)*w)=fc_t;
end
end
pre_time=toc;
tic;
[f,d]=vl_sift(I,'frames',fc,'orientations');
sift_time=toc;
disp(['准备关键点所用的时间: ' num2str(pre_time)]);
disp(['计算区域大小为126*126个像素的描述子的时间: ' num2str(sift_time)]);
%% 单个处理
fc2=[63;72;sigma;ori];
tic;
[f2,d2]=vl_sift(I,'frames',fc2,'orientations');
sift_time2=toc;
disp(['计算一个关键点的描述时间: ' num2str(sift_time2)]);
result:
准备关键点所用的时间: 0.024732
计算区域大小为126*126个像素的描述子的时间: 0.59428
计算一个关键点的描述时间: 0.078686我们发现,VLFeat即使在给定关键点即位置,初始尺度和方向,其也会将所有octave和s计算出。这花费了大量的时间。因此使用时,要对代码进行修改。即只计算指定尺度下的高斯图像的描述子。
关键点描述子的计算,可参考:
http://blog.csdn.net/raby_gyl/article/details/52800106
在图像框架中计算描述子
VLFat使用下面的理论,实现在原图像上进行梯度的计算,然后再经过仿射。而不是在旋转后的图像上进行梯度的计算。
翻译:http://www.vlfeat.org/api/sift.html
为关键点附加一个描述子可以获得相似变换的不变形(或者其他的相似协变帧)。那么将图像投影到标准描述子框架中有消除图像变形的效果。
然而在实际中,在图像框架中很容易计算描述子。我们用带 ^ 表示标准框架,用不带 ^ 表示图像框架。假定标准框架和图像框架是仿射相关的:
因此可以在图像框架中直接计算所有的量,例如无限分辨率的图像在两个框架中是相关的:
尺度 σ^ 的标准化的图像,与尺度图像是相关的:
…..略
参考文献:
1.http://www.vlfeat.org/overview/sift.html
2.http://www.vlfeat.org/api/sift.html
3.An open implementation of the SIFT detector and descriptor
sift:
4.http://blog.csdn.net/xiaowei_cqu/article/details/8069548 [小魏的修行路]
5.http://blog.csdn.net/zddblog/article/details/7521424 [zddhub的专栏]
6.http://blog.csdn.net/abcjennifer/article/details/7639681 [Rachel Zhang的专栏]
vlfeat:
7.http://blog.csdn.net/fengbingchun/article/details/50638391 [网络资源是无限的]
8.http://www.cnblogs.com/yao7837005/archive/2012/08/24/2654797.html [一直走下去]
9.http://blog.csdn.net/liguan843607713/article/details/42215965 [Object o]