Deep Learning中的一些Tips详解(RELU+Maxout+Adam+Dropout)
本文主要讲如果我们的Deep Learning出现了一些不好的结果,我们该怎么办。学习前请先参考:反向传播算法(Backpropagation)----Gradient Descent的推导过程
目录
- 一、概述
- 二、training set上表现不好
- 1.新的激活函数
- 2.RELU
- 3.RELU的变形
- 3.Maxout
- 1.思想
- 2.训练
- 4.梯度更新
- 1.Adagrad
- 2.RMSProp
- 4.动量与惯性的思想
- 5.Adam
- 三、testing set上表现不好
- 1.Early Stopping
- 2.Regularization
- 3.Dropout
一、概述
总得来说,所有的改进方法都可以用下面这张图来总体概括:
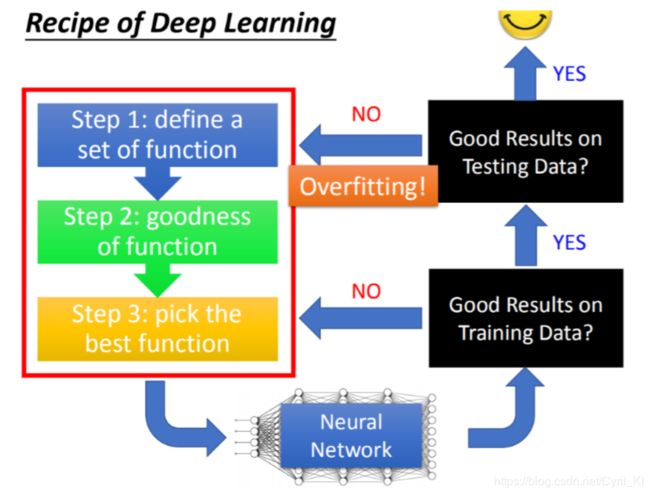
经历深度学习的三个步骤之后,我们得到了一个NN。那么首先我们应该检查该NN在训练集上面的表现,如果连训练集都不能很好的拟合,那么就应该检查那三个步骤我们是否可以有修改的地方。 如果训练集表现很好,那么就用测试集来检查这个NN,测试集上表现很好,那么这个模型就可以投入使用了,否则就是overfitting!! 因此overfitting一定是先在训练集上面表现好了,才有可能出现。
这个也算是深度学习与机器学习的区别了,一些机器学习的方法比如SVM等,很容易在training set上得到一个比较好的表现,深度学习并不是这样,因此我们首先需要在训练集上进行验证!!
因此,针对目的来找解决方案,所有的改进无非就是分为两类:
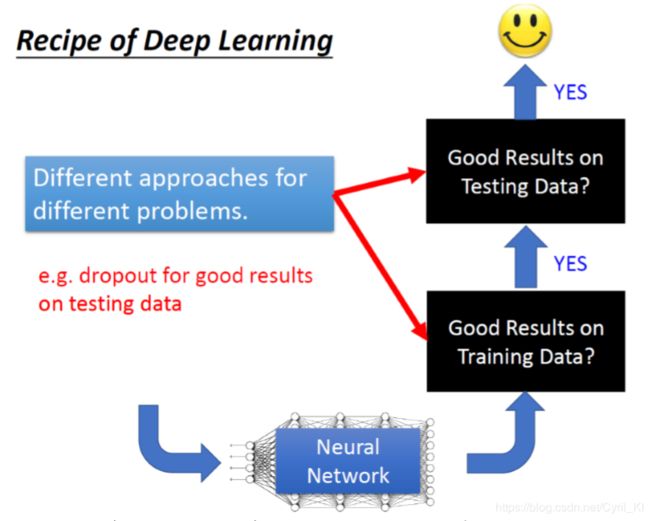
要么就是为了让模型在训练集上表现更好,要么就是让模型在测试集上表现更好。比如dropout是在training data上表现好,testing data上表现不好的时候才会去使用,当training data 结果就不好的时候用dropout 往往会越训练越差。 关于Dropout后面会讲到。
二、training set上表现不好
1.新的激活函数
关于激活函数,在逻辑回归以及BP算法的讲解中,我们都只是接触了Sigmoid Function。当我们使用Sigmoid function时,往往会出现以下问题:
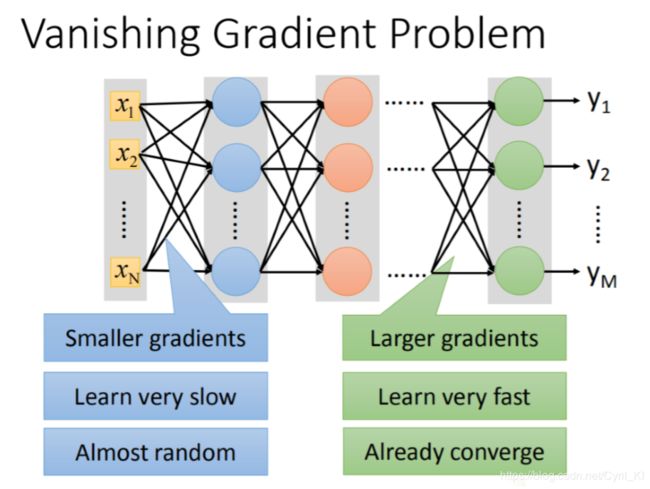
当网络比较深的时候,容易出现Vanishing Gradient Problem。所谓梯度消失,是指比较靠近input layer的几层Gradient值较小,而靠近output layer的较大,那么当使用梯度下降法寻求最优解时,当我们设定相同的learning rate,靠近输入层的参数更新会比较慢,而靠近输出层的参数更新比较快!!后面很快就收敛了,那么就停止学习了!!
为什么梯度值前面小后面大?
我们该怎么判断一个梯度值是大还是小呢?在Forward pass中我们很容易就可以得到 ∂ z ∂ w \frac{\partial z}{\partial w} ∂w∂z,然后在Backward pass中我们又可以得到 ∂ l ∂ z \frac{\partial l}{\partial z} ∂z∂l,二者相乘,就是一个梯度值 ∂ l ∂ w \frac{\partial l}{\partial w} ∂w∂l,评判这个值是否很大,我们可以用斜率的思想去考虑:假设求导很大,那么就相当于斜率很大,那么当w变化即使很小时,l变化也会非常的大!! 这句话应该还是比较好理解哈。所以我们可以假定w变化了一个非常小的幅度 Δ w \Delta w Δw时,如果输出变化非常大,那么我们就可以说这个梯度值很大。
我们再来看看Sigmoid的函数:
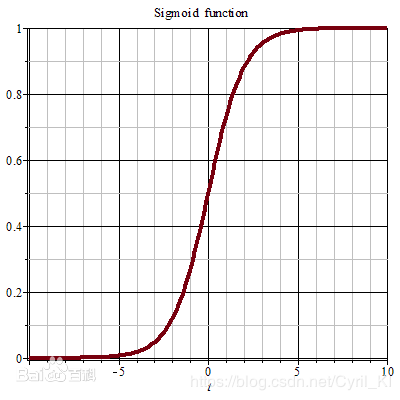
从函数图像我们可以看出来,定义域是R,而值域是(0,1),假设x变化非常大,比如我从1000变化到1000000,但是y变化是非常小的。
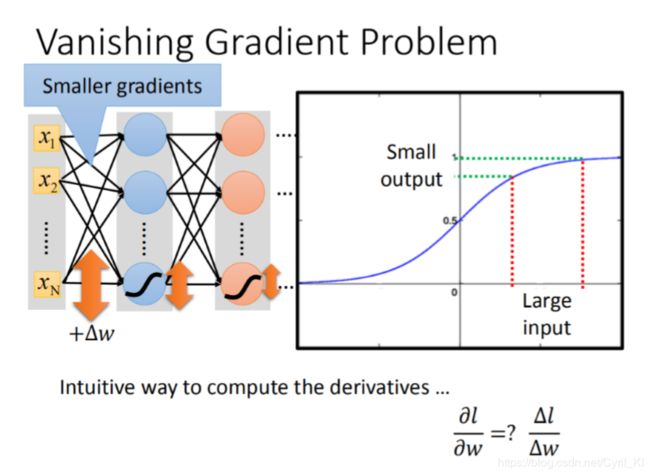
假设第一层的w变化了一个 Δ w \Delta w Δw,由于激活函数是Sigmoid,那么第一层的输出也就变化很小了,第一层的输出又是第二层的输入,输入变化导致第二次的输出也发生了变化,但是变化更小了…以此类推,最后的输出变化也就非常小了,所以越靠近后面层,梯度值是越大的。
至于解决办法,一种比较容易想到的思维就是,既然你越靠后梯度值越大,那么越靠后我可以设置learning rate越小,这样就可以减缓它的更新速度,不至于太快。 但是这种不太容易实现,我们更喜欢的方式是换掉Sigmoid。因为Sigmoid才是“祸害之源”。
2.RELU
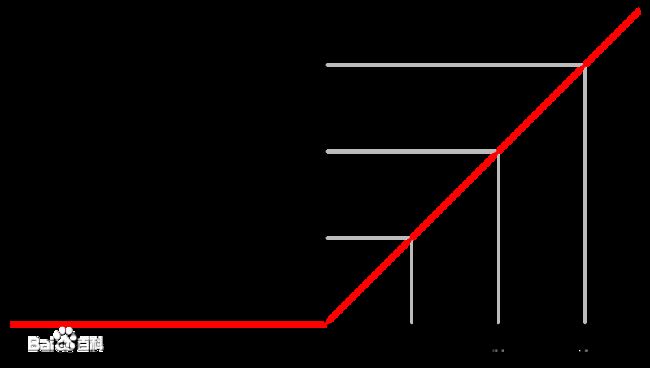
线性整流函数(Rectified Linear Unit, ReLU),又称修正线性单元,是一种人工神经网络中常用的激活函数(activation function),它函数表达式为:
f ( x ) = m a x ( 0 , x ) f(x)=max(0,x) f(x)=max(0,x),图像长成这样:
使用RELU作为激活函数,优势在哪里?最大的优势就是可以处理上面提到的梯度消失的问题。
将激活函数换成RELU之后:
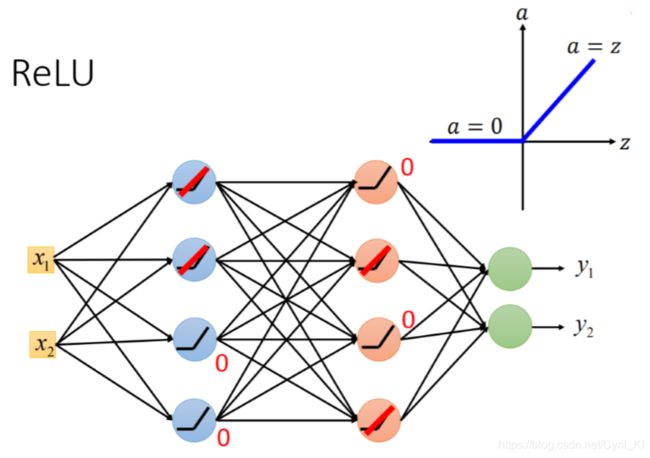
如果输入小于0,那么输出就是0,如果输入大于0,那么输出就是本身。
这里的好处就是,如果一个neural的输出是0,那么它对最终的输出y1,y2是没有影响的,因此可以将这些神经元直接拿掉,如下所示:
输入等于输出,不会像Sigmoid那样将一个很大的输入变成一个很小的输出,那么前后层的梯度值就不会像先前那样,所以就解决了梯度消失的问题。
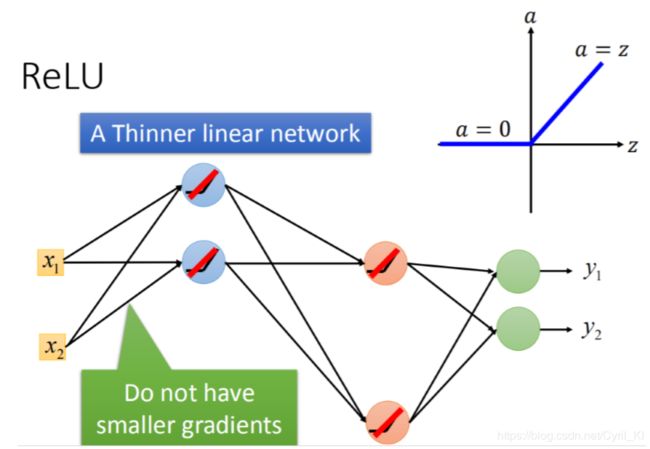
但是这样一来,好像就有了一点问题,好像结构就变得是线性了,因为输入等于输出,就不能处理一些比较复杂的模型。但是实际上以RELU为激活函数的NN只是小范围内是线性的,总体来说还是非线性的。 这句话怎么理解呢?假设我输入的x1,x2使得当前的网络长成这个样子,但是一旦我换两个数据,这两个输入的数据相比较于x1,x2变化很大,那么NN也就变化了,所以它不是线性的。
3.RELU的变形
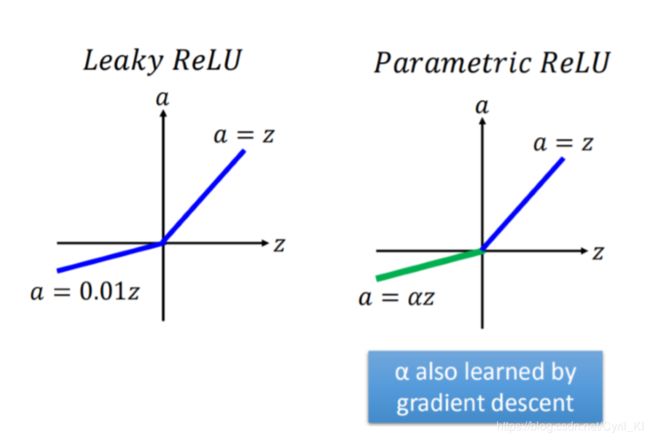
在z<0的时候,我们可以乘上一个系数 α \alpha α,来使得模型更加的复杂一些,这个很好理解。
3.Maxout
1.思想
我们可以不用自已一开始就选好所有神经元的激活函数,而是通过training set来学习,然后决定每一个神经元应该用什么激活函数,这个就是Maxout的思想。
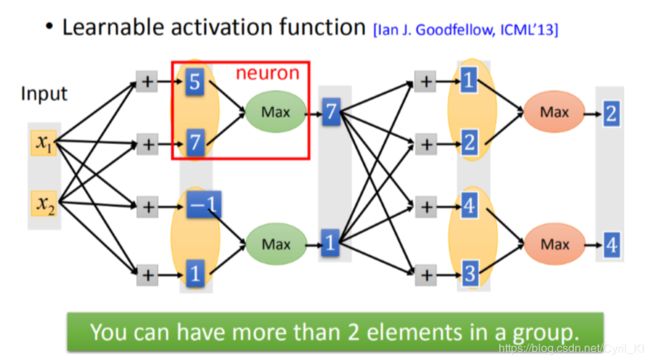
假设输入的是x1,x2,x1,x2乘以weight得到5,7,-1,1。这些值原本是通过ReLU或者sigmoid function得到的。而在Maxout里面,会将这些值进行分组,在组里选出一个最大的值当做真正的输出(选出7和1,这是一个vector 而不是一个value,7 和1再乘以不同的weight得到不同的value,然后再分组,再选出最大值,如上图所示。
那Maxout怎么训练出RELU?举个例子:

对于激活函数是RELU的神经元,如左图所示,我们输出得到z=wx+b,然后呢,将z再经过RELU处理,就变成了上述模样。而对于右边Maxout,z1=wx+b,z2=0,二者取max之后,也就变成了RELU,挺神奇的!!
一个线性和一个常数,取max之后,就是RELU。那假如不是一个常数呢?而是另一个线性函数,如图所示:
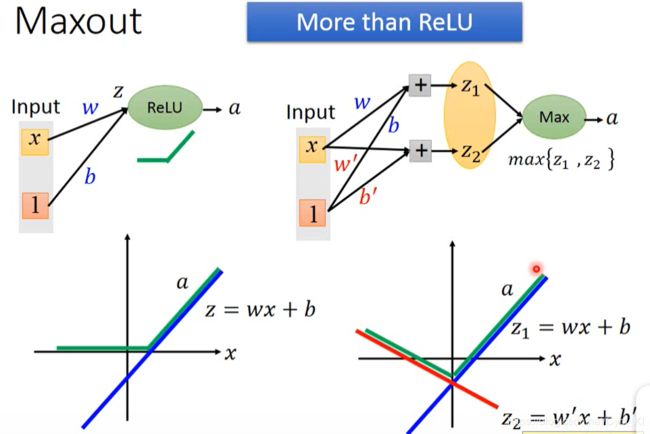
那最后的激活函数就变成了右边这个样子,因此我们只要适当地选择 w ′ w^{'} w′和 b ′ b^{'} b′这两个参数,就可以得到各种奇形怪状的激活函数。 而且上述两种情况还只是两个不同的函数组合,要是2个以上那就更加复杂了,也就能够满足我们的要求。
2.训练
那怎么用训练集来训练出每一个神经元的激活函数呢?答案也是Gradient Descent。那到底怎么train呢?因为可能有的人认为max这个函数不能够来求微分的,但实际上,我们可以这样考虑:
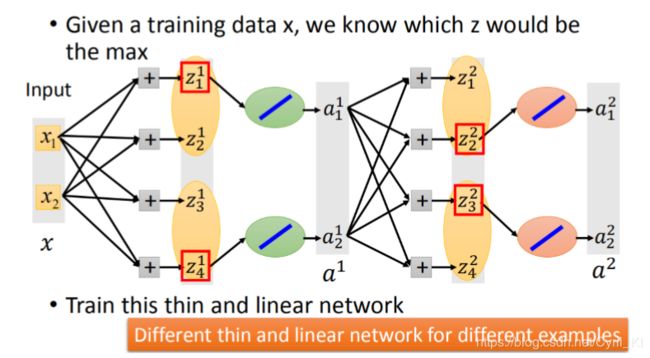
假设红框框部分是一个group里面比较大的一个,然后我们就可以把不是最大的神经元给去掉,如下所示:
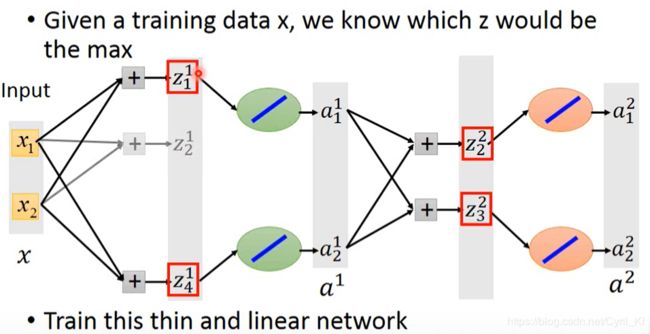
然后重点来了:我们可以把max函数换成y=x这个函数,从全局非线性变成了局部线性,这个时候就能够求微分了。当然有的人可能会考虑到去掉某些部分之后,有些w和b不就训练不到了么,须知,我们的数据有很多,以上这种结构仅仅只是输入为x1,x2的情况,加入换一个输入,那么NN的结构就不会是现在这个样子,因此我们可以训练到NN中所有的参数。 也即是说,不同的数据会唤醒不同的神经元,不会出现神经元死亡的情况。
4.梯度更新
如果讲到这里还不知道什么是梯度下降法,可以参考:BP推导
1.Adagrad
具体思想如下:
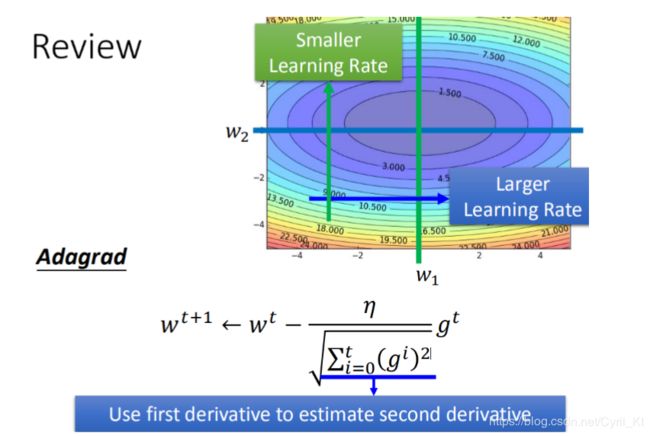
简单来说,learning rate不是一成不变的,而是用一个固定的learning rate来除以该参数过去所有梯度值的平方和再开根号,最后再乘上上一个梯度值,当前参数值减去上述这个乘积,就是新的参数。
2.RMSProp
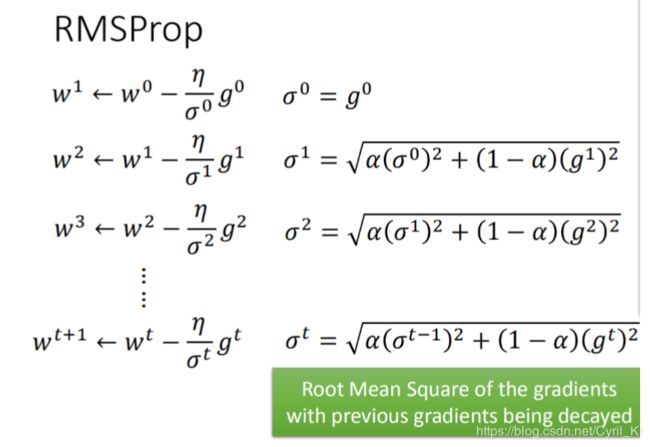
RMSProp与Adagrad只有些许不同。不同的地方在于Adagrad除上的是以前所有梯度值的平方和然后再开平方,而RMSProp相对来说较为复杂一点,表达式如上图所示,计算还是相对简单的,只是这个参数 α \alpha α该怎么理解呢?可以理解为当前的梯度值跟以往梯度值(指的是前几次加权后的梯度值,有点递归的意思了)的权重比较。也就是说,如果我把 α \alpha α调整的特别小,那么我们就会认为当前的梯度值更为可信。
4.动量与惯性的思想
我们以前提到过,Gradient Descent可能会陷入局部最优,这个是很显然的道理:
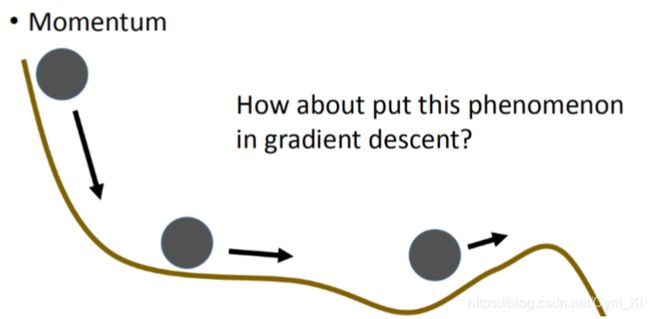
当我们的参数移动到某一个山谷的时候,梯度值已经为0了,但是这个位置很明显不是loss最低的位置,一般的方法当梯度值为0的时就已经停止参数更新的,于是得到了一个的local minimize。但在现实生活中,我们设想如下情景:
在一个山顶,给一个小球一个动量,它会往下滚,当它落到某一个山谷的时候,由于惯性它会继续往前走,但是如果已经落入了最低点,凭借惯性它也会继续往前走。但是如果它已经深陷最低点,那么它继续往上爬的可能性,或者说爬上去然后继续落入下一个不是最低点的可能性是很小的,因为能量不够。这样,我们就有可能解决局部最优的问题,为什么是有可能?因为如果局部最优的位置已经很低了,有可能凭借惯性,它也不足以爬上去,最后又只能落回来!!
Momentum的具体操作方法:
我们每次改变参数移动的方向时,不再只考虑gradient,而是现在的gradient加上前一个时间点移动的方向,前一个时间点的方向刚好就用来体现惯性。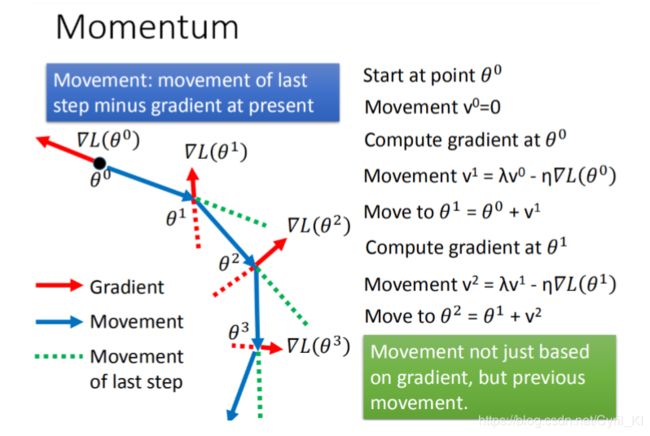
如上图所示,Gradient是我们算出来的当前的梯度值,我们应该向它的反方向运动,但是呢,我们现在不仅仅只是单方向的反方向运动,还要考虑前一次运动的方向,然后两个合成,构成新的前进方向。 注意,由于参数不止一个,所以梯度值算出来是一个向量,这一点千万要意识到。
5.Adam
Adam=RMSProp+Momentum。 二者结合的意思就是说,我们通过RMSProp来确定反方向的移动向量长度,然后还要考虑Momentum,也就是前一次的移动方向,最后二者合成得到最终的移动方向。
三、testing set上表现不好
1.Early Stopping
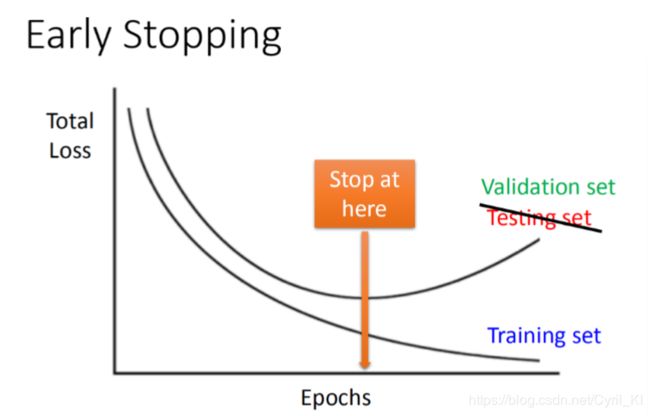
随着我们的训练,Total Loss会越来越小,无论是在训练集上还是测试集上,但是测试集上可能到达某一个点之后就会停下来,接着就开始增加了。 假设我们开了天眼,知道testing set在某一点会使得Total Loss最小,那么我们就应该停在这个地方,但是我们并不能开天眼。。。因此我们采用验证集的方式。我们会用validation set模拟testing set,什么时候validation set最小,你的training就会停下来。
2.Regularization
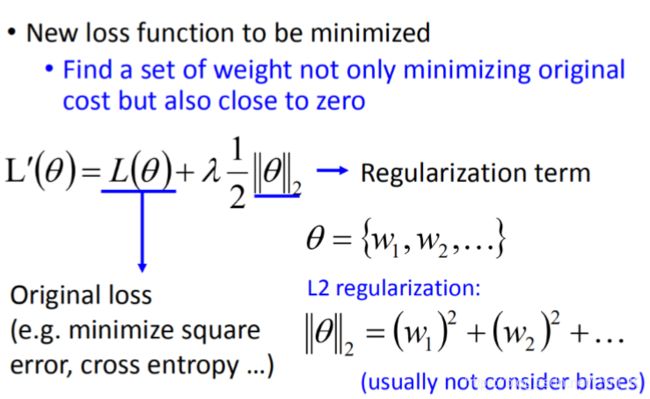
前面我们讲线性回归的时候有讲到这个正则化,就是在损失函数后面加上正则项,由此可以形成岭回归等等。 加正则项的目的是使得模型更加平滑,防止过拟合。(可以参考:机器学习之岭回归)
加上上述的正则化项之后,我们再用梯度下降的方法:(比较简单就不自己推了)
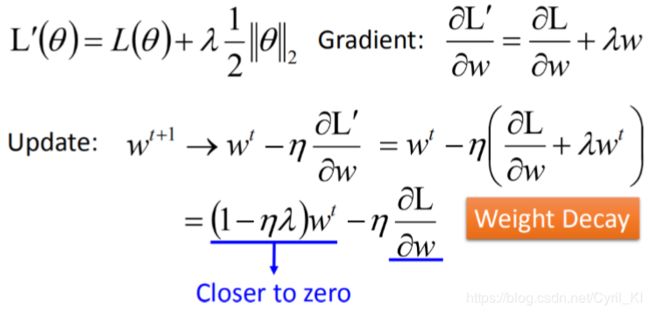
我们发现,原来是长成这个样子的:
加上正则化项之后,变成:
多出的 1 − n λ 1-n\lambda 1−nλ,这一项<1,每次乘上之后相当于会让 w t w^{t} wt变小一些,最后会慢慢变小趋近于0,但是会与后一项梯度的值达到平衡,使得最后的值不等于0。
3.Dropout
这里我们不妨回忆一下前面讲集成学习时随机森林的策略:随机选取样本和特征来防止过拟合。Dropout有着类似的思想,我们每次都随机选取一些神经元丢弃掉,与之相连的部分也去掉,剩下的部分我们来训练参数。
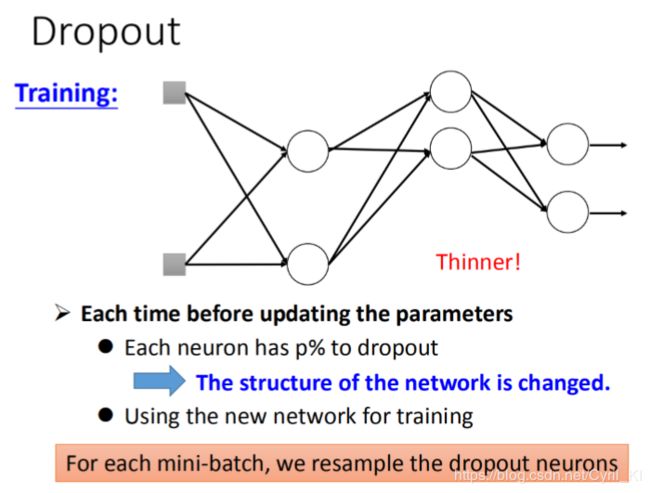
如上所示,我们选择“抓爆”(谐音)一些神经元之后,结构变得更加清晰明了了。注意,每次我们都需要重新选取新的神经元来进行Dropout,意思就是有些神经元可能会被“抓爆”多次,但是回想我们前面随机森林的讲解,某些特征虽然在某一次训练中没被选上,但是后面它总会有机会选上的,这里也是类似,我们不用担心某些参数没有被训练到。
Dropout有几点需要注意:
- 在Testing的时候我们不用Dropout,只是在用训练集训练NN的时候才用Dropout。
- 假设我们在训练的时候每一个神经元被“抓爆”的概率是p,那么当我们在测试集进行测试的时候,所有的weight都要乘上1-p。
- 针对第二条,为什么要乘上一个系数1-p?因为我们训练的时候,随机“抓爆”了一些神经元,这样训练出来的模型,如果我们在Testing的时候不乘上一个系数的话,会使得Testing的结果跟真实结果相差很多。
- “抓爆”会降低模型复杂度,减轻过拟合现象,这与我们一开始的初衷是一致的,也就是Training set上表现好,而Testing set上表现不好。
相信看过集成学习的人,会觉得Dropout比较好理解一些,因此Dropout也可以认为是Ensemble的一个终极版本!!!
这里需要注意的是,可能某些人会认为我们每次训练时training set都是一样的,只是我们会随机Dropout一些神经元,但是其实并不是这样子的,如下所示:
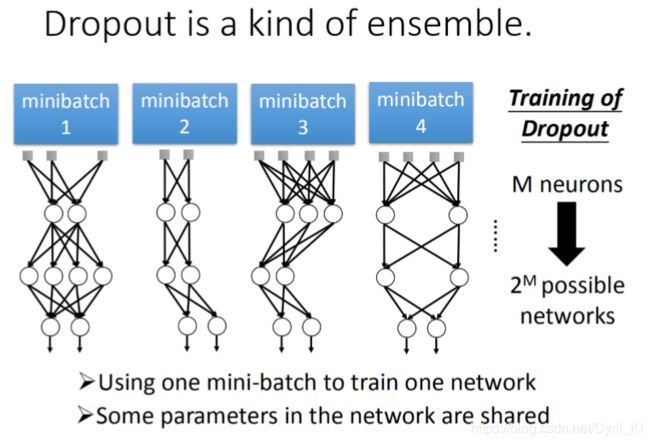
我们每次产生的数据集都是不一样的,每一个mini-batch里面的数据也是随机的,mini-batch数据随机+Dropout就是我们前面集成学习里面随机森林中的数据随机+特征随机。
既然是跟Ensemble差不多,那么后面就不再赘述。参考:
机器学习之Ensemble