伺服系统组成:伺服电机及伺服驱动器控制原理(三环控制)
——
伺服(Servo)意味着“伺候”和“服从”。
伺服系统既可以是开环控制方式,也可以是闭环控制方式。本文按后者叙述。
1伺服系统
伺服系统(servomechanism)指经由闭环控制方式达到对一个机械系统的位置、速度和加速度的控制。
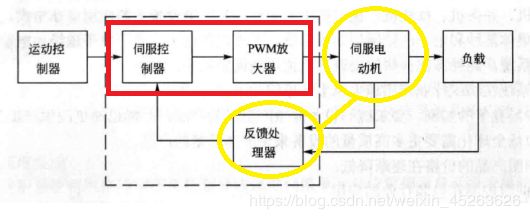
一个伺服系统的构成包括被控对象、执行器和控制器(伺服电动机、功率放大器、控制器和反馈装置)。
执行器的功能在于主要停工被控对象的动力,主要包括伺服电动机和功率放大器,伺服电动机包括反馈装置如广电编码器、旋转编码器或光栅等(位置传感器)。
控制器的功能在于提供整个伺服系统的闭环控制如转矩控制、速度控制、位置控制等,伺服驱动器通常包括控制器和功率放大器。
反馈装置除了位置传感器,可能还需电压、电流和速度传感器。
下图为一般工业用伺服系统的组成框图,其中红色为伺服驱动器组成部分,黄色为伺服电机组成部分。
“伺服”—词源于希腊语“奴隶”的意思。人们想把“伺服机构”当个得心应手的驯服工具,服从控制信号的要求而动作。在讯号来到之前,转子静止不动;讯号来到之后,转子立即转动;当讯号消失,转子能即时自行停转。由于它的“伺服”性能,因此而得名——伺服系统。
伺服系统的基本要求
- 稳定性好
- 精度高
- 动态响应快
- 抗扰动能力强
2常用参数
伺服电机常用参数
- 输入电压
- 功率
- 转速
- 扭矩
- 编码器分辨率
- 尺寸&重量
伺服驱动器常用参数
自动控制原理相关
- 位置比例增益:设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小。但数值太大可能会引起振荡或超调;
- 位置前馈增益:位置环的前馈增益大,控制系统的高速响应特性提高,但会使系统的位置不稳定,容易产生振荡;
- 速度比例增益:设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,速度滞后量越小。但数值太大可能会引起振荡或超调;
- 速度积分时间常数:设置值越小,积分速度越快。
- 速度反馈滤波因子:数值越大,截止频率越低,电机产生的噪音越小;数值越小,截止频率越高,速度反馈响应越快。
- 最大输出转矩设置
伺服系统的性能指标
- 检测误差:包括给定位置传感器和反馈位置传感器的误差,传感器本身固有,无法克服;
- 系统误差:系统类型决定了系统误差。
只要p+q>0,对阶跃输入信号就有足够的跟踪能力;对于速度输入信号,I型系统跟踪能力大幅削弱,跟随误差与开环传递函数的比例系数成反比,II型仍具有优良跟踪能力;对于加速度输入信号,仅II型系统能勉强跟随。
3伺服电机
伺服电机的选型
- 系统精度:需综合考虑转子转动惯量、电动机类型、转矩抖动等
- 电动机功率:负载方式及大小计算输出力矩
- 电动转速
- 选配刹车:刹车用来在电机停止时候锁定位置,不让电机由于外力作用发生运动;并非在运行时刹车。
- 过载能力
伺服电机的反馈装置
伺服系统常用的检测元件以光电编码器最为常见。

编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号,前者称为码盘,后者称为码尺。根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。
常见的光电编码器由光栅盘,发光元件和光敏元件组成。光栅实际上是一个刻有规则透光和不透光线条的圆盘,光敏元件接收的光通量随透光线条同步变化,光敏元件输出波形经整形后,变为脉冲信号,每转一圈,输出一个脉冲。根据脉冲的变化,可以精确测量和控制设备位移量。

编码器和电流环没有任何联系,它的采样来自于电机的转动。
4伺服驱动器控制原理
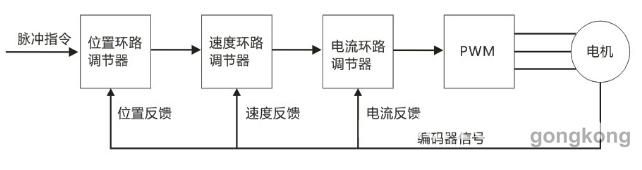
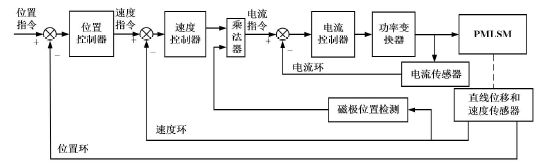
运动伺服一般都是三环控制系统,从内到外依次是电流环、速度环和位置环。
伺服的控制方式
1、转矩控制(电流环/单环 控制):转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小。可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。主要应用于需要严格控制转矩的场合,在转矩模式下驱动器的运算最小,动态响应最快。
单环控制难以满足伺服系统的动态要求,一般不采用。
2、速度控制(速度环、电流环/双环 控制):通过模拟量的输入或脉冲的频率都可以进行转动速度的控制。速度控制包含了速度环和电流环。任何模式都必须使用电流环,电流环是控制的跟本。
3、位置控制(三环控制):伺服中最常用的控制。位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度(类似步进电机),也有些伺服可以通过通讯方式直接对速度和位移进行赋值(外部模拟量的输入)。由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。
位置控制模式下系统进行了所有 3 个环的运算,此时的系统运算量最大,动态响应速度也最慢。
转矩控制:是指伺服驱动器仅对电机的转矩进行控制
速度控制:是指驱动器仅对电机的转速和转矩进行控制
位置控制:是指驱动器对电机的转速、转角和转矩进行控制
APR——位置调节器; ASR——速度调节器; ACR——电流调节器
http://www.elecfans.com/kongzhijishu/sifuyukongzhi/522696.html 伺服驱动器的工作原理及其控制方式
三环就是3个闭环负反馈PID调节系统。
第一环为电流环,最内环,此环完全在伺服驱动器内部进行,其PID常数已被设定,无需更改。电流环的输入是速度环PID调节后的输出,电流环的输出就是电机的每相的相电流。**电流环的功能为对输入值和电流环反馈值的差值进行PD/PID调节。**电流环的反馈来自于驱动器内部每相的霍尔元件。电流闭环控制可以抑制起、制动电流,加速电流的响应过程。
第二环为速度环,中环。速度环的输入就是位置环PID调节后的输出以及位置设定的前馈值。**电流环的功能为对输入值和速度环反馈值的差值进行PI调节。**速度环的反馈来自于编码器的反馈后的值经过“速度运算器”的计算后得到的。
第三环为位置环,最外环。位置环的输入就是外部的脉冲。**位置环的功能为对输入值和位置环反馈值的差值进行P调节。**位置环的反馈来自于编码器反馈的脉冲信号经过“偏差计数器”的计算后得到的。位置调节器APR其输出限幅值是电流的最大值,决定着电动机的最高转速。
位置环、速度环的参数调节没有什么固定的数值,由很多因素决定。
多环控制系统调节器的设计方法是从内环到外环,逐个设计各环调节器,使每个控制环都是稳定的,从而保证整个控制系统的稳定性;每个环节都有自己的控制对象,分工明确,易于调整。这种设计的缺点在于对最外环控制作用的响应不会很快。
https://blog.csdn.net/reasonyuanrobot/article/details/96497025?depth_1-utm_source=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-1&utm_source=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-1 伺服电机三环(电流环、速度环、位置环)控制原理及参数调节
https://www.sohu.com/a/159764872_463998 伺服电机三环控制系统调节方法浅谈
5 伺服系统的设计
根据伺服电动机的种类,伺服系统可分为直流和交流两大类。采用电流闭环控制后,二者具有相同的控制对象数学模型。因此可用相同的方法设计交流或直流伺服系统。
对于闭环伺服控制系统,常用串联校正或并联校正方式进行动态性能的调节。校正装置串联配置在前向通道的校正方式称为串联校正,一般把串联校正单元称作调节器,所以又称调节器校正;若校正装置与前向通道并行,称为并联校正。
调节器校正
常用的调节器有PD调节器、PI调节器和PID调节器。设计中根据实际伺服系统的特征进行选择。
6系统接线及面板设置
系统接线
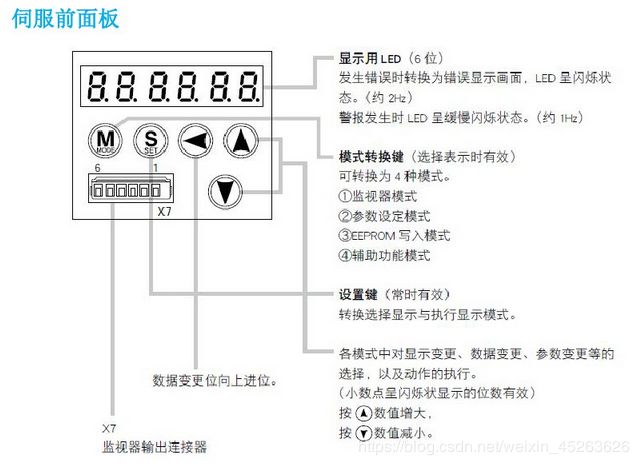
面板设置
https://wenku.baidu.com/view/960e1773afaad1f34693daef5ef7ba0d4b736d2b.html?from=search
伺服电机及其控制原理——3.4伺服控制器常用设置应用
附录1 伺服电动机与其它电动机的辨析
伺服电动机与普通电动机的区别
- 普通电动机(有刷)多运行于开环控制,伺服电动机运行于闭环控制。
- 伺服电动机动态性高
- 伺服电动机启动转矩大、调速范围宽
- 伺服电动机结构紧凑
- 伺服电动机定子散热方便
伺服电动机与舵机的区别
舵机相当于简化版的完整的伺服系统。
伺服电机都是三环控制,即电流环、速度环、位置环;舵机只检测位置环(一般用电位器)。
伺服电动机与步进电动机的区别
- 步进电机多运行于开环控制,伺服电动机运行于闭环控制。(使用步进电机的场合,要么不需要位置反馈,要么在其他设备上进行位置反馈)
- 伺服电机控制精度和定位高于步进电机
- 伺服电机低频特性好,过载能力大,响应时间短
- 伺服电机调速范围大于步进电动机
- 步进电机只能接受脉冲信号,二私服电动机可以接受模拟信号、脉冲信号和总线通信信号
伺服电机和步进电机常被搞混,二者外形相似,区别点在于伺服电机尾部的反馈装置;此外步进电机一般都是一个引出线端,伺服电机由于带编码器所以有2个引线输出端(编码线和动力线)。
推荐阅读
https://www.zhihu.com/question/37374664/answer/167299936 步进电机、伺服电机、舵机的原理和区别?

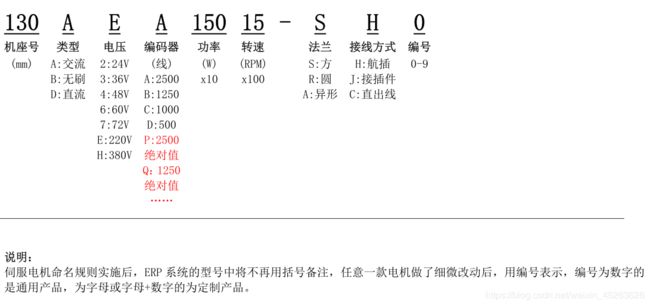
附录2 伺服电机/驱动器命名规则
伺服电机
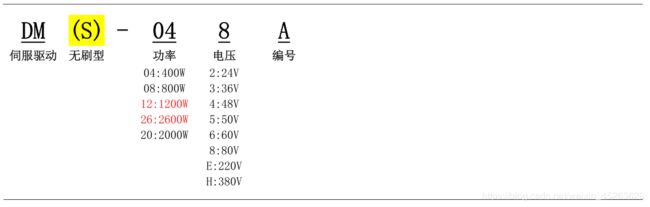
 伺服驱动器
伺服驱动器
部分内容引自《变频器与步进/伺服驱动技术完全精通教程》——伺服系统及原理