Python读取pcd点云文件
关于Kinect采集点云数据,可以参考https://blog.csdn.net/qq_35565669/article/details/106627639
有两种方法读取pcd文件,使用Python的库open3d读取,或者直接当做txt文件读取,然后python处理数据
目录
open3d读取点云
python直接读取
open3d读取点云
import open3d as o3d
import numpy as np
def read_pcd(file_path):
pcd = o3d.io.read_point_cloud(file_path)
print(np.asarray(pcd.points))
colors = np.asarray(pcd.colors) * 255
points = np.asarray(pcd.points)
print(points.shape, colors.shape)
return np.concatenate([points, colors], axis=-1)注意读取的点云三维坐标和颜色是分开的,分别是points和colors,而且colors中的RGB数据是归一化的,所以要乘以255.
读取的结果为
[[ 0.49283338 1.870551 3.8150003 106. 112.
128. ]
[ 0.50465167 1.8759862 3.8260002 129. 133.
149. ]
[ 0.51545358 1.8775003 3.8290002 138. 141.
155. ]
[ 0.52380067 1.8701893 3.8140001 142. 144.
155. ]
[ 0.53598863 1.8766096 3.8270001 148. 150.
161. ]
[ 0.5481053 1.8825409 3.8390002 157. 161.
172. ]
[ 0.55548692 1.8722914 3.8180001 156. 160.
170. ]
[ 0.57120341 1.8899956 3.8540001 159. 163.
173. ]
[ 0.57821184 1.8787676 3.8310001 160. 164.
174. ]
[ 0.59047383 1.8847055 3.8430002 161. 165.
175. ]]python直接读取
因为Kinect的使用是用C++,而当对点云数据进行处理时,使用Python比较方便。pcd文件其实就是一个txt文件,里面存储了点云信息,包括点云的数目,点云的类型(是pointxyz还是pointxyzrgb),还有点云的宽度和高度。
这里使用的点云文件存储的点是pointxyzrgb类型,每个点存储了xyz坐标信息,还有argb信息。可以看到下图里三个浮点数就是xyz坐标了,后面的4294901502是一个32位数,argb每个通道对应了8位。要注意的是,透明度a是在RGB前面的,一般是255,所以可以看到argb的二进制数都很大。
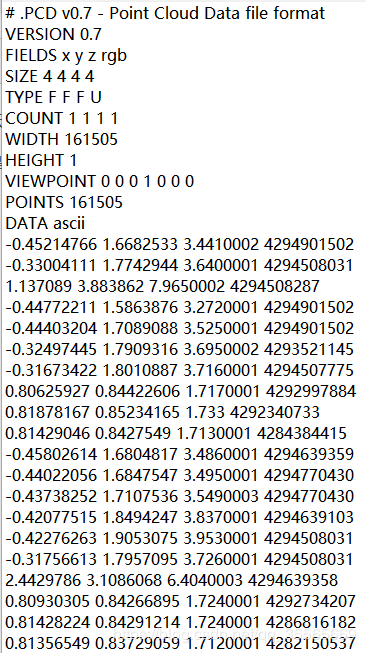
先读取一下点云的大小,然后对每行数据处理,把每行的xyzrgba存进一个列表,最后转为numpy数组就行了。
def load_pcd_data(file_path):
pts = []
f = open(file_path, 'r')
data = f.readlines()
f.close()
line = data[9]
# print line
line = line.strip('\n')
i = line.split(' ')
pts_num = eval(i[-1])
for line in data[11:]:
line = line.strip('\n')
xyzargb = line.split(' ')
x, y, z = [eval(i) for i in xyzargb[:3]]
argb = xyzargb[-1]
# print type(bgra)
argb = bin(eval(argb))[2:]
a, r, g, b = [int(argb[8 * i:8 * i + 8], 2) for i in range(4)]
pts.append([x, y, z, a, r, g, b])
assert len(pts) == pts_num
res = np.zeros((pts_num, len(pts[0])), dtype=np.float)
for i in range(pts_num):
res[i] = pts[i]
# x = np.zeros([np.array(t) for t in pts])
return res最后读取的效果为
[[ 0.49283338 1.870551 3.8150003 255. 106.
112. 128. ]
[ 0.50465167 1.8759862 3.8260002 255. 129.
133. 149. ]
[ 0.51545358 1.8775003 3.8290002 255. 138.
141. 155. ]
[ 0.52380067 1.8701893 3.8140001 255. 142.
144. 155. ]
[ 0.53598863 1.8766096 3.8270001 255. 148.
150. 161. ]
[ 0.5481053 1.8825409 3.8390002 255. 157.
161. 172. ]
[ 0.55548692 1.8722914 3.8180001 255. 156.
160. 170. ]
[ 0.57120341 1.8899956 3.8540001 255. 159.
163. 173. ]
[ 0.57821184 1.8787676 3.8310001 255. 160.
164. 174. ]
[ 0.59047383 1.8847055 3.8430002 255. 161.
165. 175. ]]可以看出与第一种方法读取的结果相同,这验证了第二种方法的正确性。