初始化 | VINS-Mono 论文公式推导与代码解析分讲
- 初始化(松耦合)
在提取的图像的Features和做完IMU的预积分之后,进入了系统的初始化环节,主要的目的有以下两个:
系统使用单目相机,如果没有一个良好的尺度估计,就无法对两个传感器做进一步的融合,这个时候需要恢复出尺度;
要对IMU进行初始化,IMU会受到bias的影响,所以要得到IMU的bias。
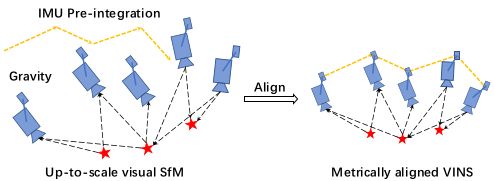
所以我们要从初始化中恢复出尺度、重力、速度以及IMU的bias,因为视觉(SFM)在初始化的过程中有着较好的表现,所以在初始化的过程中主要以SFM为主,然后将IMU的预积分结果与其对齐,即可得到较好的初始化结果。
2.1 相机与IMU之间的相对旋转相机与IMU之间的旋转标定非常重要,偏差1-2°系统的精度就会变的极低。设相机利用对极关系得到的旋转矩阵为 ![]() ,IMU经过预积分得到的旋转矩阵为
,IMU经过预积分得到的旋转矩阵为 ![]() ,相机与IMU之间的相对旋转为
,相机与IMU之间的相对旋转为 ![]() ,则对于任一帧满足
,则对于任一帧满足
![]()
将旋转矩阵写为四元数,则上式可以写为
![]()
将其写为左乘和右乘的形式
![]()

那么对于 对测量值,则有
其中 为外点剔除权重,其与相对旋转求得的角度残差有关, 为计算相对旋转需要的测量对数,其由最终的终止条件决定。角度残差可以写为,

至此,就可以通过求解方程 得到相对旋转,解为 的左奇异向量中最小奇异值对应的特征向量。但是,在这里还要注意求解的终止条件(校准完成的终止条件)。在足够多的旋转运动中,我们可以很好的估计出相对旋转 ,这时 对应一个准确解,且其零空间的秩为1。但是在校准的过程中,某些轴向上可能存在退化运动(如匀速运动),这时 的零空间的秩会大于1。判断条件就是 的第二小的奇异值是否大于某个阈值,若大于则其零空间的秩为1,反之秩大于1,相对旋转) 的精度不够,校准不成功。
对应代码在InitialEXRotation::CalibrationExRotation中。
// 相机与IMU之间的相对旋转
if(ESTIMATE_EXTRINSIC == 2)
{
ROS_INFO(“calibrating extrinsic param, rotation movement is needed”);
if (frame_count != 0)
{
// 选取两帧之间共有的Features
vector
// 校准相机与IMU之间的旋转
Matrix3d calib_ric;
if (initial_ex_rotation.CalibrationExRotation(corres, pre_integrations[frame_count]->delta_q, calib_ric))
{
ROS_WARN("initial extrinsic rotation calib success");
ROS_WARN_STREAM("initial extrinsic rotation: " << endl << calib_ric);
ric[0] = calib_ric;
RIC[0] = calib_ric;
ESTIMATE_EXTRINSIC = 1;
}
}
}
2.2 检测IMU可观性// 计算均值
map
Vector3d sum_g;
for (frame_it = all_image_frame.begin(), frame_it++; frame_it != all_image_frame.end(); frame_it++)
{
double sum_dt = frame_it->second.pre_integration->sum_dt;
Vector3d tmp_g = frame_it->second.pre_integration->delta_v / sum_dt;
sum_g += tmp_g;
}
Vector3d aver_g = sum_g * 1.0 / ((int)all_image_frame.size() - 1);
// 计算方差
double var = 0;
for (frame_it = all_image_frame.begin(), frame_it++; frame_it != all_image_frame.end(); frame_it++)
{
double sum_dt = frame_it->second.pre_integration->sum_dt;
Vector3d tmp_g = frame_it->second.pre_integration->delta_v / sum_dt;
var += (tmp_g - aver_g).transpose() * (tmp_g - aver_g);
}
// 计算标准差
var = sqrt(var / ((int)all_image_frame.size() - 1));
//ROS_WARN(“IMU variation %f!”, var);
if(var < 0.25) //! 以标准差判断可观性
{
ROS_INFO(“IMU excitation not enouth!”);
//return false;
}
2.3 相机初始化(Vision-Only SFM)求取本质矩阵求解位姿![]()
三角化特征点![]()
PnP求解位姿![]()
转换到IMU坐标系下
![]() 坐标系作为参考系
坐标系作为参考系
不断重复直到恢复出滑窗内的Features和相机位姿
2.4 视觉与IMU对齐
Gyroscope Bias Calibration
Velocity, Gravity Vector and Metric Scale Initialization
Gravity Refinement
Completing Initialization
对应代码:VisualIMUAlignment陀螺仪Bias标定

求解上式的最小二乘解,即可得到 ,注意这个地方得到的只是Bias的变化量,需要在滑窗内累加得到Bias的准确值。
对应代码:solveGyroscopeBias
void solveGyroscopeBias(map
Matrix3d A;
Vector3d b;
A.setZero();
b.setZero();
map::iterator frame_i;
map::iterator frame_j;
for (frame_i = all_image_frame.begin(); next(frame_i) != all_image_frame.end(); frame_i++) {
frame_j = next(frame_i);
MatrixXd tmp_A(3, 3);
VectorXd tmp_b(3);
tmp_A.setZero();
tmp_b.setZero();
Eigen::Quaterniond q_ij(frame_i->second.R.transpose() * frame_j->second.R);
tmp_A = frame_j->second.pre_integration->jacobian.template block<3, 3>(O_R, O_BG);
tmp_b = 2 * (frame_j->second.pre_integration->delta_q.inverse() * q_ij).vec();
A += tmp_A.transpose() * tmp_A;
b += tmp_A.transpose() * tmp_b;
}
Vector3d delta_bg = A.ldlt().solve(b);
ROS_WARN_STREAM("gyroscope bias initial calibration " << delta_bg.transpose());
// 因为求解出的Bias是变化量,所以要累加
for (int i = 0; i <= WINDOW_SIZE; i++)
Bgs[i] += delta_bg;
// 利用新的Bias重新repropagate
for (frame_i = all_image_frame.begin(); next(frame_i) != all_image_frame.end(); frame_i++) {
frame_j = next(frame_i);
frame_j->second.pre_integration->repropagate(Vector3d::Zero(), Bgs[0]);
}
}
初始化速度、重力向量和尺度因子

通过Cholosky分解求解
对应代码:LinearAlignment
优化重力
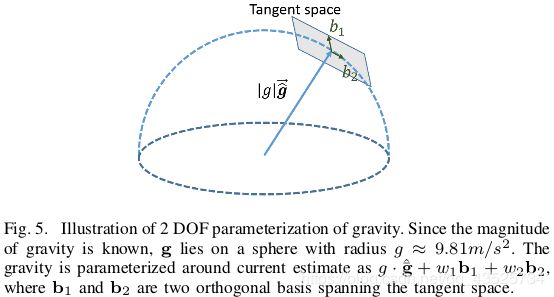
重力矢量的模长固定(9.8),其为2个自由度,在切空间上对其参数化

同样,通过Cholosky分解求得![]() ,即相机
,即相机 ![]() 系下的重力向量。
系下的重力向量。
最后,通过将 ![]() 旋转至惯性坐标系(世界系)中的 z 轴方向[0,0,1],可以计算第一帧相机系到惯性系的旋转矩阵
旋转至惯性坐标系(世界系)中的 z 轴方向[0,0,1],可以计算第一帧相机系到惯性系的旋转矩阵 ![]() ,这样就可以将所有变量调整至惯性世界系(水平坐标系,z轴与重力方向对齐)中。
,这样就可以将所有变量调整至惯性世界系(水平坐标系,z轴与重力方向对齐)中。
对应代码:RefineGravity