细分到模块来讲矢量控制——永磁同步电机矢量控制基础补充(七)
基础补充类系列文章链接:
永磁同步电机矢量控制到无速度传感器控制学习教程(PMSM)
永磁同步电机矢量控制基础补充(一)——如何绘制电机输出的磁链
永磁同步电机矢量控制基础补充(二)——Matlab自带坐标系和书本自然坐标系之间的关系
永磁同步电机矢量控制基础补充(三)——如何深入的理解调制度m
永磁同步电机矢量控制基础补充(四)——如何设定电流环PI调节器和转速环PI调节器的限幅值
永磁同步电机矢量控制基础补充(五)——什么是低通滤波器?
永磁同步电机矢量控制基础补充(六)——如何在simulink初始化电机参数?
模块化解释永磁同步电机PMSM的矢量控制——永磁同步电机矢量控制基础补充(七)
永磁同步电机矢量控制基础补充(八)——Matlab/Simulink打开仿真出现的问题汇总
永磁同步电机矢量控制基础补充(九)——Simulink软件的入门学习
永磁同步电机矢量控制基础补充(十)——调制模式和控制方式之间的区别?
这段时间有比较多同学问到我一个相同的问题,这矢量控制一块又一块的,干啥非要整成这个样子,矢量控制的整体结构为什么是这样的?哈哈哈哈,当时可把我给问住了,这可真是个令我头发飞舞起来且秃头的问题。可能对于刚刚进入矢量控制的我们来说哈,这一下有了这么多书有了这么多资料,到底又该从何下手呢?这样的提问不禁让我觉得框架结构的理解其实是一个很重要的问题。在开始系统学习之前,如果能够对整个系统有一个大体的概念;在不知道具体细致原理之前,如果能够初步了解各个模块的作用,以及各个模块协同工作的联系,那么在深入细致的学习时就会感到更加踏实,就像玩游戏的时候,知道自己到底在攻破哪个关卡,这种学习的成就感就油然而生。因此我希望在此,通过我自己的一些个人总结,把整个原理框架给大家初步的阐述一下,有不对地方还希望大家指正。(此篇文章主要从各模块作用的角度上阐述矢量控制,如何通过这一个一个积木搭建成为一个系统)
总体 矢量控制结构框架
矢量控制原理框图如下图所示,我将其分为主要的7个小的模块进行阐述,模块代号在下图中已标注出来。

1 Clark变换模块(3s/2s变换)
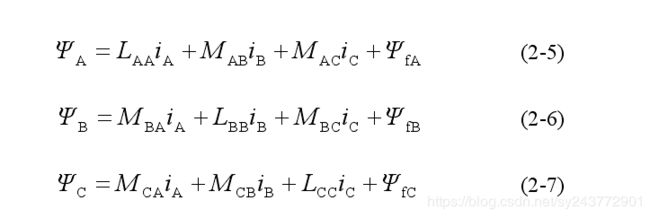
下图为永磁同步电机在三相坐标系下的磁链方程,可以从中看出三相永磁同步电机是一个复杂的系统,具有多变量、强耦合以及非线性的特性,因此在三相静止坐标系下对永磁同步电机进行直接控制是比较困难的。通过坐标变换与解耦运算的方法,使得各个物理量从静止坐标系转换到同步坐标系。将定子电流分解为互相独立的历次电流和转矩电流,且均为直流量。这样就能够分别对励磁电流和转矩电流进行实时控制,以达到直流电机的控制性能。(直流电机的性能优越的原因是独立控制励磁电流和转矩电流,这两者能够独立控制,就可以控制何时施加转矩,就可以按照需求随意控制电机是否转动转多快的问题)
Clark变换的作用就是将三相坐标系的量转换到两相静止坐标系。这里我们不禁提出一个问题,为什么要换到两相静止坐标系呀?其实有个最简单的道理在里面,直角坐标系的纵轴和横轴之间相互垂直,各自发展趋势对彼此相互不影响,其数学模型中的变量更容易实现独立控制,这是三相坐标系不具备的优点。
2 Park变换模块(2s/2r变换)
在经过Clark变换后,电机的数学模型已经坐落在两相静止坐标系了,但由于PMSM也分为转子和定子,两者之间的不同步,无法通过控制一个电流就能实现对磁场或者转矩的控制,因为控制逆变器定子侧的电流,对转子的控制还受到位置因素的影响,相同电流不同位置控制效果不同,所以还需要解耦。如果能够实现定子和转子同步旋转呢,就可以使得两者处于相对静止状态(书上描述为旋转磁动势的大小和转速和固定的交流绕组产生的旋转磁动势相同),此时就跟直流电机没有任何区别了,一个电流控制励磁,一个电流控制转矩。
所以Park变换的作用就在于剔除位置信息对控制的影响,使得同步电机在两相坐标系下,等效为直流电机,但此时又在旋转所以称为两相旋转坐标系。

注:变换这部分需要细究的同学,请查阅陈伯时运动控制系统的6.6节坐标变换内容,讲得极其详细。
34 PI调节器模块
电流调节器和转速调节器在模块搭建上是分开的,但其实两者在功能上是一致的,所以在这里将两者放在一起叙述。
PI调节器在所有领域,它根据给定值与实际输出值构成度控制偏差,将偏差的比例和积分通过线性组合构成控制量,对被控对象进行控制。PI调节可以按照比例反应系统的偏差,系问统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。
P:比例, I:积分。PI调节叫作:比例、积分调节。它的原理是通过比例积分(指对输百入、输出偏差的作用)调节器(作用),控制输出信号符合设定值。
比例调节作用:按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。比例作用大,可以加快调节,减少误差,但是过大的比度例,使系统的稳定性下降,甚至造成系统的不稳定。
积分调节作用:使系统消除稳态误差,提高无误差度。因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。 更详细的介绍还得上小破站:https://www.bilibili.com/video/av42262043
回到电机控制系统,无论是电流PI调节器还是转速PI调节器,都是给定值和反馈值的误差转化为下一个环节的给定值。例如转速PI调节器,回到文章的第一张图,将给定转速和反馈转速的误差转化为 iq 的PI调节器的给定值 iqref,实现对转矩的控制,从这里就可以理解为什么给定转速大于反馈转速的时候,输出转矩为正,需要电机加速;而给定转速小于反馈转速时,输出转矩为负,需要电机减速。

5 Ipark变换模块
此模块作用是将两相旋转坐标系下的Ud和Uq转化为两相静止坐标系下的Ualpha和Ubeta,这里估计就有铁汁们就要问了,你不都花了老大劲变过去了,咋滴又变回来是个啥情况啊。
其实原因在于哈,我们最终控制的三相逆变器他是铁骨铮铮的三相静止坐标系模型啊,三相全控桥六个开关三个独立相可不能被我等小辈在此耍花招变来变去,大家不妨记住一个常理电力电子的都是铁汉!电机控制的都是花里胡哨的(开个玩笑)。所以在Ud和Uq给定后,我们得把他变回去,通过SVPWM模块转化为对应的脉冲序列,对逆变器进行相应的控制。

6 SVPWM模块
这部分就是空间矢量控制技术,其原理是从电机的角度出发使得电机处于幅值固定,可跟随电机转子旋转的旋转磁场,即磁通正弦。它以交流电机所用的理想磁通圆为参照,把三相对称的正弦波电压产生的理想磁场作为参照,对逆变器的开关进行有序的组合,使得产生的磁通能够逼近基准圆磁通,最终可以得到逆变器的不同开关状态的组合,而这些组合的控制是通过PWM的形式来控制的。
此部分的作用在整个控制框架内,是对Ipark模块变换出来的给定电压Ualpha和Ubeta进行脉冲实现,也就是通过SVPWM产生于相应的脉冲使得逆变器输出的电压于Ualpha和Ubeta一致。
此部分其实具有相当多的内容,具体请参照此链接内的文件
下载链接:https://pan.baidu.com/s/1FAfFQVdmjFI0xYJPSmAOXA 提取码:4jxg
此链接下更是讲得极尽详细生动活泼,给大家推荐以下https://www.cnblogs.com/ly0019/p/9053875.html

小结:
从上述内容可以总结出一个信号的流程,此流程从电机出发,经过电机三相静止坐标系下电流iaibic 、两相静止坐标系电流ialpha 和 ibeta, 两相旋转坐标系电流 id 和 iq,两相旋转坐标系给定电压 Ud 和 Uq ,两相静止坐标系给定电压 Ualpha 和 Ubeta,6路PWM脉冲信号。我自己画了一个信号流图。铁汁可以两个图结合起来看,就知道具体整个系统是怎么运行的了。


注:
1:此为永磁同步控制系列文章之一,应大家的要求,关于永磁同步矢量控制的系列文章已经在主页置顶,大家可以直接去主页里面查阅,希望能给大家带来帮助,谢谢。
2:矢量控制的六篇文章后。弱磁、MTPA、位置控制系列讲解已经补充,也放在主页了,请大家查阅。
3: 恰饭一下,也做了一套较为详细教程放在置顶了,内含基本双闭环、MTPA、弱磁、三闭环、模糊PI等基本控制优化策略,也将滑模,MRAS等无速度控制课题整理完成,请大家查看^_^