永磁同步电机无速度传感器控制(一)——滑模观测器(二)【滑模观测器设计过程】
1、选择滑模观测器参照的数学模型
对于表贴式三相PMSM而言,扩展反电动势的表达式可以被简化为与仅与电机的转速有关。然后将表贴式PMSM的扩展反电动势表达式写下来,进行分析:

从上式可以看出,只要可以得到扩展反电动势(EMF)的大小,即可通过求取反正切值求取实际位置 theta 值。
对于观测器的设计,一般会选取一个数学模型进行参照。而对于PMSM而言,一般会根据电机的电压模型或者电流模型来设计观测器。由于电机的负载状态会影响扩展反电动势的大小,而电机在高速重载的情况下,定子电流将会有较大的变化。因此,对于估算扩展反电动势的滑模观测器,按照PMSM的电流模型来设计会更合理。
因此将PMSM的电压状态方程,改写为电流状态方程的形式,将其作为滑模观测器的参照模型。

2、滑模观测器的设计
为了估算扩展反电动势 Eα 和 Eβ ,对滑模观测器的设计如下方程所示:
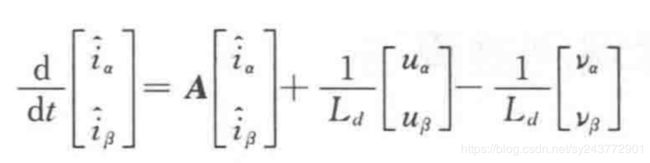
观测器在形式上和实际电机的数学模型完全一致。这么设计的原因:由于实际电机电流模型中包含扩展反电动势的大小,如果我们设计的滑模观测器模型,能够通过实时校正,逐步的逼近实际的电机模型,当观测器模型与实际电机模型完全一致的时候,观测器模型内的扩展反电动势参数即为我需要的实际电机扩展反电动大小。这个道理就类似于,我无法实际的去测量博物馆玻璃罩中珍藏的文物,那如果我扫描一个镜像出来,去手把手测量这个镜像的长宽高,一样可以得到我们需要的信息。而滑模观测器的设计就是基于这个原理。
3、滑模面的选取
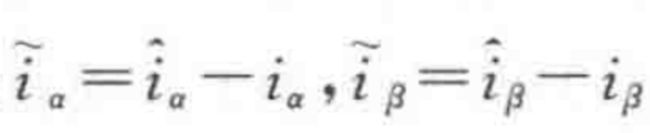
将上述两个数学模型进行做差,可以得到如下定子电流误差方程:
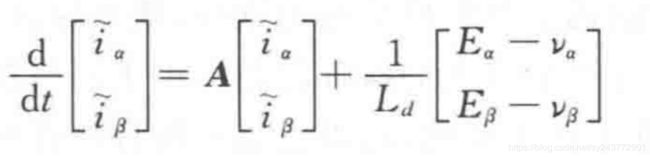
如果能够使得实际 α 轴定子电流和 β 轴定子电流一致,那么滑模观测器的扩展反电动势也和实际电机的扩展反电动势一致。因此可将滑模面设计为 :
4、滑模控制律的设计
滑模控制律的设计是基于滑模变结构控制器的。滑模变结构控制器的原理(滑模观测器原理与其相同)如下图所示:

如上图所示,其中A点穿过滑模面,B点由滑模面扩散,C点从其他地方回归至滑模面。只有C点才能使得系统最终趋于稳定,使得系统回归至滑模面。滑模控制律的设计就是要实现C点的功能:当系统参数在滑模面以上时,使其运动轨迹向下;当系统参数在滑模面以下时,其运动轨迹向上,其运动时刻向着滑模面。
因此开关函数 sgn() 为滑模观测器的实现提供了坚实基础。当系统参数运行至滑模面以上时,sgn = -1 ,其运动轨迹向下了;当系统参数在滑模面以下时,sgn = 1,其运动轨迹向上了。
对于扩展反电动势的滑模控制律设计而言,就是使得电流回归滑模面,使得观测器电流和实际电流之间的误差为0,则观测器扩展反电动势等于实际电机扩展反电动势,因此可将其滑模控制律设计为:

小结:
1、滑模观测器的设计过程可以分为:选择观测器参照数学模型、设计观测器模型、选择滑模面、设计滑模控制律
2、电流对于扩展反电动势影响较大,所以估算扩展反电动势的滑模观测器选择PMSM的电流模型。
3、如果能够使得实际 α 轴定子电流和 β 轴定子电流一致,那么滑模观测器的扩展反电动势也和实际电机的扩展反电动势一致。
4、对于扩展反电动势的滑模控制律设计而言,就是使得电流回归滑模面,使得观测器电流和实际电流之间的误差为0,则观测器扩展反电动势等于实际电机扩展反电动势
明天再更新后续文章:永磁同步电机无速度传感器控制(一)——滑模观测器(二)【由扩展反电势得到电机位置和速度信息】
滑模系列文章链接:
永磁同步电机矢量控制基础补充(五)——什么是低通滤波器?
永磁同步电机无速度传感器控制(一)——滑模观测器(一)【位置估计原理】
永磁同步电机无速度传感器控制(一)——滑模观测器(二)【滑模观测器设计过程】
永磁同步电机无速度传感器控制(一)——滑模观测器(三)【由扩展反电势得到电机位置和速度信息】
永磁同步电机无速度传感器控制(一)——滑模观测器(四)【仿真搭建及其结果分析】