图像缩放算法 最近邻插值算法 & 双线性插值算法
图像缩放:
resize函数是在OpenCV中经常使用的函数,功能是将一副加载到Mat中的图像调整尺寸或者按照比例进行缩放。
其中有两种简单又常用的插值算法用来实现图像缩放,分别是最近邻插值算法和双线性插值算法。
最近邻插值算法:
最近邻插值算法的思想十分简单
设原始图像src的高为h,宽为w,图像上像素值为(x,y)。
设目标图像dst的高H,宽为W,图像上的像素值为(X,Y)。
那么根据比例缩放的思想有 xX=wW x X = w W
同理,纵向上的像素对应比值为 yY=hH y Y = h H
那么在考虑目标图像dst上面的像素点(X,Y)对应到原始图像src上面像素点的位置为
(x,y)=(wWX,hHY) ( x , y ) = ( w W X , h H Y )
这里要对 wWX w W X 与 hHY h H Y 两个数值进行取整,在OpenCV源码当中,是用cvFloor函数取整,即舍去小数部分。
代码:
void InterNearestResize(const Mat &src, Mat &dst, Size &dsize, double fx = 0.0, double fy = 0.0)//原始图形以及缩放比例
{
Size ssize = src.size();//获取矩阵大小
CV_Assert(ssize.area() > 0);//保证矩阵的长宽都大于0
if (!dsize.area())//如果dsize为(0,0)
{
dsize = Size(saturate_cast<int>(src.cols*fx),//satureate_cast防止数据溢出
saturate_cast<int>(src.rows*fy));
CV_Assert(dsize.area());
}
else
{
fx = (double)dsize.width / src.cols;//Size中的宽高和mat中的行列是相反的
fy = (double)dsize.height / src.rows;
}
dst.create(Size(src.cols*fy,src.rows*fx), src.type());//将dst矩阵大小变为想要的尺寸
fx = 1.0 / fx;
fy = 1.0 / fy;
uchar *ps = src.data;
uchar *pd = dst.data;
int channels = src.channels(),x,y,out,in;
for (int row = 0; row < dst.rows; row++)
{
x = cvFloor(row * fx);
for (int col = 0; col < dst.cols; col++)
{
y = cvFloor(col * fy);
for (int c = 0; c < channels; c++)
{
out = (row * dst.cols + col) * channels + c;
in = (x * src.cols + y) * channels + c;
pd[out] = ps[in];
}
//dst.at(row, col) = src.at(x, y);
}
}
}双线性插值算法:
如果原始图像src的大小是3×3,目标图像dst的大小是4×4,考虑dst中(1,1)点像素对应原始图像像素点的位置为(0.75,0.75),如果使用最近邻算法来计算,原始图像的位置在浮点数取整后为坐标(0,0)。
上面这样粗暴的计算会丢失很多信息,考虑(0.75,0.75)这个信息,它表示在原始图像中的坐标位置,相比较取(0,0)点,(0.75,0.75)貌似更接近(1,1)点,那如果将最近邻算法中的取整方式改为cvRound(四舍五入)的方式取(1,1)点,同样会有丢的信息,即丢失了“0.25”部分的(0,0)点、(1,0)点和(0,1)点。
可以看到,dst图像上(X,Y)对应到src图像上的点,最好是根据计算出的浮点数坐标,按照百分比各取四周的像素点的部分。
如下图:
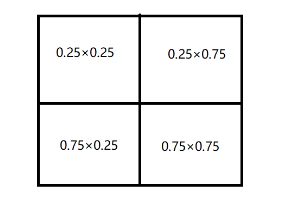
双线性插值的原理相类似,这里不写双线性插值计算点坐标的方法,容易把思路带跑偏,直接就按照比率权重的思想考虑。
将 (wWX,hHY) ( w W X , h H Y ) 写成 (x′+u,y′+v) ( x ′ + u , y ′ + v ) 的形式,表示将 x x 与 y y 中的整数和小数分开表示 uv u v 分别代表小数部分。
这样,根据权重比率的思想得到计算公式
(X,Y)=(1−u)⋅(1−v)⋅(x,y)+(u−1)⋅v⋅(x,y+1)+u⋅(v−1)⋅(x+1,y)+(u⋅v)⋅(x,y) ( X , Y ) = ( 1 − u ) · ( 1 − v ) · ( x , y ) + ( u − 1 ) · v · ( x , y + 1 ) + u · ( v − 1 ) · ( x + 1 , y ) + ( u · v ) · ( x , y )
在实际的代码编写中,会有两个问题,一个是图像会发生偏移,另一个是效率问题。
几何中心对齐:
由于计算的图像是离散坐标系,如果使用 (wWX,hHY) ( w W X , h H Y ) 公式来计算,得到的(X,Y)值是错误的比率计算而来的,即(x+1,y)、(x,y+1)、(x+1,y+1)这三组点中,有可能有几个没有参与到比率运算当中,或者这个插值的比率直接是错误的。
例如,src图像大小是 a×a a × a ,dst图像的大小是 0.5a×0.5a 0.5 a × 0.5 a 。
根据原始公式计算
(wW,hH) ( w W , h H ) 得到 (2,2) ( 2 , 2 ) (注意这不是表示点坐标,而是x和y对应的比率)
如果要计算dst点(0,0)对应的插值结果,由于 (2,2) ( 2 , 2 ) 是整数,没有小数,所以最后得到dst点在 (0,0) ( 0 , 0 ) 点的像素值就是src图像上在 (0,0) ( 0 , 0 ) 点的值。然而,我们想要的dst在 (0,0) ( 0 , 0 ) 上的结果是应该是有(0,0)(1,0)(0,1)(1,1)这四个点各自按照0.5×0.5的比率加权的结果。
所以我们要将dst上面的点,按照比率 (wW,hH) ( w W , h H ) 向右下方向平移0.5个单位。
公式如下:
运算优化:
由计算公式可以得知,在计算每一个dst图像中的像素值时会涉及到大量的浮点数运算,性能不佳。
可以考虑将浮点数变换成一个整数,即扩大一定的倍数,运算得到的结果再除以这个倍数。
举一个简单的例子,计算0.25×0.75,可以将0.25和0.75都乘上8,得到2×6=12,结果再除以 82 8 2 ,这样运算的结果与直接计算浮点数没有差别。
在程序中,没有办法取得一个标准的整数,使得两个相互运算的浮点数都变成类似“2”和”6“一样的标准整数,只能取一个适当的值来尽量的减少误差,在源码当中取值为 211 2 11 =2048,即2的固定幂数,最后结果可以通过用位移来表示除以一个2整次幂数,计算速度会有很大的提高。
代码:
void Inter_Linear(const Mat &src, Mat &dst, Size &dsize ,double fx = 0.0, double fy = 0.0)//双线性插值
{
Size ssize = src.size();//获取矩阵大小
CV_Assert(ssize.area() > 0);//保证矩阵的长宽都大于0
if (!dsize.area())//如果dsize为(0,0)
{
dsize = Size(saturate_cast<int>(src.cols*fx),//satureate_cast防止数据溢出
saturate_cast<int>(src.rows*fy));
CV_Assert(dsize.area());
}
else
{
fx = (double)dsize.width / src.cols;//Size中的宽高和mat中的行列是相反的
fy = (double)dsize.height / src.rows;
}
dst.create(dsize, src.type());
double ifx = 1. / fx;
double ify = 1. / fy;
uchar* dp = dst.data;
uchar* sp = src.data;
int iWidthSrc = src.cols;//宽(列数)
int iHiehgtSrc = src.rows;//高(行数)
int channels = src.channels();
short cbufy[2];
short cbufx[2];
for (int row = 0; row < dst.rows; row++)
{
float fy = (float)((row + 0.5) * ify - 0.5);
int sy = cvFloor(fy);//整数部分
fy -= sy;//小数部分
sy = std::min(sy, iHiehgtSrc - 2);
sy = std::max(0, sy);
cbufy[0] = cv::saturate_cast<short>((1.f - fy) * 2048);
cbufy[1] = 2048 - cbufy[0];
for (int col = 0; col < dst.cols; col++)
{
float fx = (float)((col + 0.5) * ifx - 0.5);
int sx = cvFloor(fx);
fx -= sx;
if (sx < 0)
{
fx = 0, sx = 0;
}
if (sx >= iWidthSrc - 1)
{
fx = 0, sx = iWidthSrc - 2;
}
cbufx[0] = cv::saturate_cast<short>((1.f - fx) * 2048);
cbufx[1] = 2048 - cbufx[0];
for (int k = 0; k < src.channels(); ++k)
{
dp[(row * dst.cols + col) * channels + k] =
(
sp[ ( sy * src.cols + sx ) * channels + k] * cbufx[0] * cbufy[0] +
sp[((sy + 1) * src.cols + sx) * channels + k] * cbufx[0] * cbufy[1] +
sp[(sy * src.cols + (sx + 1)) * channels + k] * cbufx[1] * cbufy[0] +
sp[((sy + 1) * src.cols + (sx + 1)) * channels + k] * cbufx[1] * cbufy[1]
) >> 22;
}
}
}
}参考博客
对应OpenCV源码部分为
opencv-2.4.9\modules\imgproc\src\imgwarp 部分