EMK(E-motor Kit)是英恒科技(中国)有限公司研发的EV/HEV电机控制器套件,主要用于新能源汽车(HEV/EV)牵引电机控制器前期开发评估使用。电机控制器作为HEV/EV的核心部件,直接影响到整车系统的质量。然而电机控制器的开发周期是一个漫长的过程,EMK不仅可以给整车厂、企业、高校等目标用户带来项目研发的便捷,同时可以缩短客户的研发时间和研发成本,并且为快速市场化占有先机。
EMK硬件上主要使用英飞凌汽车级32位微控制器TC1782芯片(基于TriCore处理器架构)和英飞凌汽车级IGBT功率驱动模块和功率驱动芯片;软件上主要参考AUTOSAR分层软件架构和使用ETAS软件工具链进行开发。
EMK控制器通过检测PMSM电机的旋转变压器反馈信号获取电机转子位置信息,通过电流传感器获取电机三相电流,通过PWM输出控制电机运行。控制器通过CAN接口接收外部控制信号,并反馈当前运行状态信息,此外控制器还配有独立的CAN接口用于诊断、标定等功能。 控制器可根据外部控制指令实现电机的四象限运行控制,并可根据控制需要切换转速、转矩两种闭环控制模式; 具备过压、过流等故障检测与处理功能。
外部接口包含信号接口、动力接口和水冷接口。其中信号接口采用TE的35pin汽车级接插件,包含电机控制所需要的电源、CANBUS通讯、电机旋变、电机温度、水温等信号;母线和三相动力接口采用专用的Amphenol快速接头,无需工具即可实现连接操作,防护等级可达到IP65;控制器底部配有优化的水冷设计,配有通用的连接接头,实现即插即用。
箱体内部包含控制单元、功率驱动单元、母排、DC-link电容等。其中控制单元主芯片采用英飞凌的32-bit Tricore汽车级单片机,可匹配不同类型的旋变, 另外还可通过ETK S4.2C在线高速测量组件对相关重要参数信号进行高速测量及配合XCP标定;功率模块采用英飞凌的汽车级HybridPack1 IGBT模块,驱动电路经过多次、多方的设计改进和验证,已实现母线电压430V、电流变化率3500A/μs的工况下内部短路的有效保护,并通过双脉冲测试得到了验证;台架测试中电机转速实现了8000转、功率达到了40KW;母排经过结构优化设计,减少了寄生电感产生的关断尖峰电压。有效的避免了IGBT的过压失效;EMK控制器已通过了相关的汽车产品的电气可靠性、EMC、振动、高低温等测试。
EMK控制器软件在软件架构上主要有两部分组成:基础软件层和算法应用层,如图1所示:
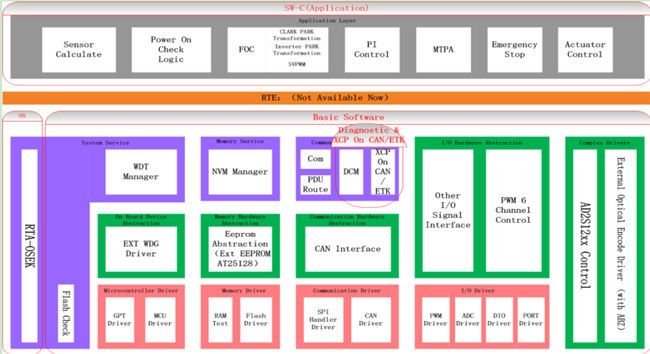
基础软件层参考AUTOSAR软件架构进行开发,主要包括:
●驱动层:主要为TC1782主控芯片驱动程序,包括ADC,PWM等芯片模块的驱动。
●抽象层:主要为复杂驱动,控制AD2S12xx旋变驱动和ABZ光电编码传感器驱动。
●服务层:主要含基于ETAS RTA-OSEK的操作系统、WDT看门狗控制,NVM存储器读写服务,和COM信号转换、DCM诊断通讯、XCP on CAN/ETK的通讯服务。
算法应用层主要基于ETAS ASCET进行开发、仿真和代码生成,主要包含
●建模和仿真:通过ETAS的ASCET-MD工具,进行FOC算法建模和算法仿真。
●自动代码生成:通过ETAS的ASCET-SE工具,实现自动软件代码的生成。
软件特点:
1:实时OSEK操作系统:新能源汽车控制策略是一个典型的多任务实时系统。为了提高软件可靠性,同时在任务调度方面达到条理清晰且划分明确,EMK控制器采用了汽车电子专用OSEK实时操作系统RTA-OSEK,在满足电机控制系统实时性需求的同时,也保证了电机任务调度的质量。RTA-OSEK配置界面如图2所示:

图2:RTA-OSEK配置界面
2:XCP标定和测量:电机控制器的开发调试与电机本体参数(比如电机电感与永磁体磁链)、硬件参数(比如电流传感器)、机械电参数(比如旋变零点)、MTPA与弱磁参数以及电流环PI参数等众多参数有关。为了调试的便捷,EMK控制器软件采用XCP On CAN/ETK的标定技术,基于INCA 7.x实现了测量和标定的功能,使得用户能够在PC界面上,对多达近千个电机控制参数进行标定,使之能适应大多数PMSM电机。同时通过XCP测量技术,能够在电机运行的同时即获取控制软件内部数据变量的数值,便于用户调试。基于INCA的XCP标定与测量工具界面如图3所示:
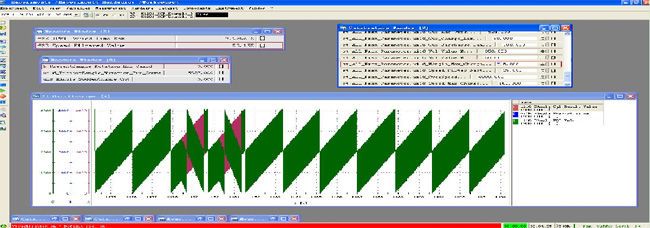
图3:基于INCA的XCP标定与测量界面
3:ASCET建模、仿真和自动代码生成:EMK
控制器应用层算法涵盖变PWM载波频率、电流环解耦、各种不同负载下的参数辨识、死区补偿、自适应性的弱磁控制算法、故障辨识和处理等内容,其开发均是基于ETAS的ECU软件开发平台ASCET。ASCET是一个规范的汽车用ECU软件开发环境,包含ASCET-MD(建模与仿真)、ASCET-RP(快速原型)与ASCET-SE-ECU(代码生成)三个部分。ASCET产品系列可实现基于模型的应用软件开发,并根据这些模型自动生成代码。从使用框图和状态机进行应用软件产品的初始设计到MCU目标的代码自动生成,ASCET产品专门开发用于满足汽车行业对于嵌入式软件实时性、效率和安全性等方面的特殊要求,ASCET开发的软件已被广泛用于近7000万个电子控制单元中,相比较Matlab/Simulink来说更具针对性和高效安全。图4为基于ASCET开发的FOC电机控制算法仿真界面。
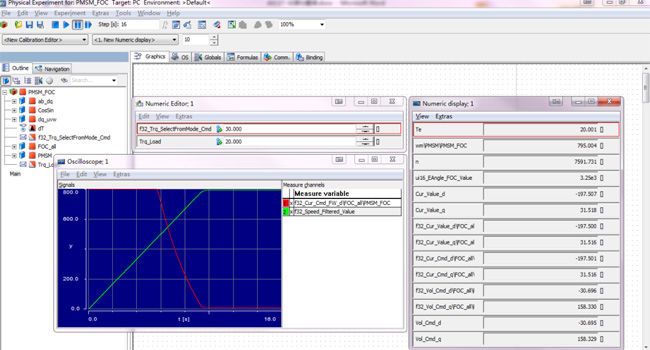
图4:FOC电机控制ASCET仿真