VINS-Mono代码学习记录(九)--processImage()(滑窗优化边缘化部分)
上一节结束了初始化的内容,根据这张流程图:
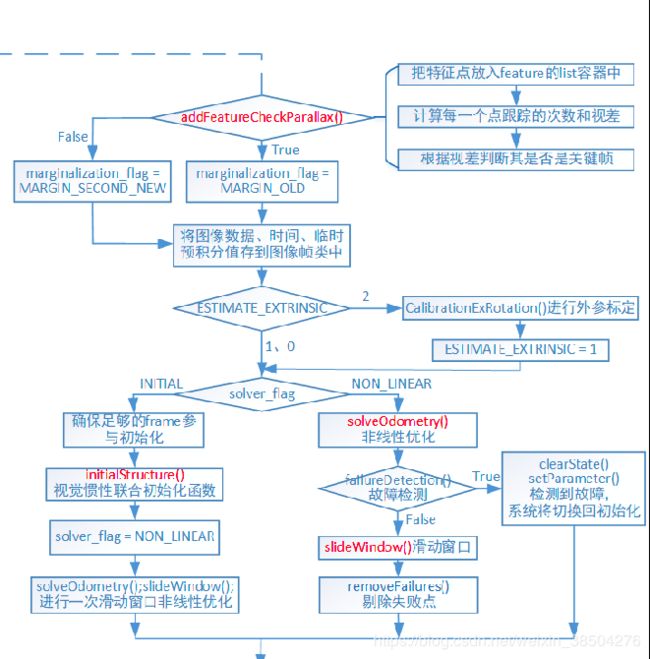 接下来继续学习其中的solveOdometry( )函数,这一块就开始优化啦,VINS-Mono采用的是ceres来进行优化的。
接下来继续学习其中的solveOdometry( )函数,这一块就开始优化啦,VINS-Mono采用的是ceres来进行优化的。
在solveOdometry( )函数中,首先需要了解的是三角化triangulate(Vector3d Ps[], Vector3d tic[], Matrix3d ric[]),这一部分需要先看理论知识,不然就会一头雾水,在这里,直接贴上我查找的对于三角化的比较好理解的解释:
参考链接: https://blog.csdn.net/qq_37611824/article/details/93210012
参考链接2: https://blog.csdn.net/u012101603/article/details/79714332
代码部分为:
void FeatureManager::triangulate(Vector3d Ps[], Vector3d tic[], Matrix3d ric[])
{
for (auto &it_per_id : feature)
{
it_per_id.used_num = it_per_id.feature_per_frame.size();
if (!(it_per_id.used_num >= 2 && it_per_id.start_frame < WINDOW_SIZE - 2))
continue;
if (it_per_id.estimated_depth > 0)
continue;
int imu_i = it_per_id.start_frame, imu_j = imu_i - 1;
ROS_ASSERT(NUM_OF_CAM == 1);
Eigen::MatrixXd svd_A(2 * it_per_id.feature_per_frame.size(), 4);//每一帧可以产生两个约束
int svd_idx = 0;
Eigen::Matrix P0;
Eigen::Vector3d t0 = Ps[imu_i] + Rs[imu_i] * tic[0];//这个坐标变换有点搞不清楚
Eigen::Matrix3d R0 = Rs[imu_i] * ric[0];
P0.leftCols<3>() = Eigen::Matrix3d::Identity();
P0.rightCols<1>() = Eigen::Vector3d::Zero();
for (auto &it_per_frame : it_per_id.feature_per_frame)
{
imu_j++;
Eigen::Vector3d t1 = Ps[imu_j] + Rs[imu_j] * tic[0];
Eigen::Matrix3d R1 = Rs[imu_j] * ric[0];
Eigen::Vector3d t = R0.transpose() * (t1 - t0);
Eigen::Matrix3d R = R0.transpose() * R1;
Eigen::Matrix P;
P.leftCols<3>() = R.transpose();
P.rightCols<1>() = -R.transpose() * t;
Eigen::Vector3d f = it_per_frame.point.normalized();//(u,v,1)坐标
svd_A.row(svd_idx++) = f[0] * P.row(2) - f[2] * P.row(0);//构建svd_A每帧的第一个约束
svd_A.row(svd_idx++) = f[1] * P.row(2) - f[2] * P.row(1);//构建svd_A每帧的第二个约束
if (imu_i == imu_j)
continue;
}
ROS_ASSERT(svd_idx == svd_A.rows());
Eigen::Vector4d svd_V = Eigen::JacobiSVD(svd_A, Eigen::ComputeThinV).matrixV().rightCols<1>();
double svd_method = svd_V[2] / svd_V[3];
//it_per_id->estimated_depth = -b / A;
//it_per_id->estimated_depth = svd_V[2] / svd_V[3];
it_per_id.estimated_depth = svd_method;
//it_per_id->estimated_depth = INIT_DEPTH;
if (it_per_id.estimated_depth < 0.1)
{
it_per_id.estimated_depth = INIT_DEPTH;
}
}
}
看到一个对于理论推导的介绍,
参考链接: https://blog.csdn.net/qq_41839222/article/details/93593844
参考链接:https://blog.csdn.net/q597967420/article/details/76099443
optimization()中部分注释如下:
void Estimator::optimization()
{
//[1]创建一个ceres Problem实例, loss_function定义为CauchyLoss.
ceres::Problem problem;
ceres::LossFunction *loss_function;
//loss_function = new ceres::HuberLoss(1.0);
loss_function = new ceres::CauchyLoss(1.0);
//[2]添加优化参数量, ceres中参数用ParameterBlock来表示,类似于g2o中的vertex,
// 这里的参数块有sliding windows中所有帧的para_Pose(7维) 和 para_SpeedBias(9维)
for (int i = 0; i < WINDOW_SIZE + 1; i++)
{
ceres::LocalParameterization *local_parameterization = new PoseLocalParameterization();
problem.AddParameterBlock(para_Pose[i], SIZE_POSE, local_parameterization);//SIZE_POSE=7
problem.AddParameterBlock(para_SpeedBias[i], SIZE_SPEEDBIAS);//SIZE_SPEEDBIAS=9
}
/*add vertex of: camera extrinsic */
for (int i = 0; i < NUM_OF_CAM; i++)
{
ceres::LocalParameterization *local_parameterization = new PoseLocalParameterization();
problem.AddParameterBlock(para_Ex_Pose[i], SIZE_POSE, local_parameterization);
if (!ESTIMATE_EXTRINSIC)
{
ROS_DEBUG("fix extinsic param");
problem.SetParameterBlockConstant(para_Ex_Pose[i]);
}
else
ROS_DEBUG("estimate extinsic param");
}
if (ESTIMATE_TD)
{
problem.AddParameterBlock(para_Td[0], 1);
//problem.SetParameterBlockConstant(para_Td[0]);
}
//[3]添加残差,依次加入margin项,IMU项和视觉feature项. 每一项都是一个factor, 这是ceres的使用方法,
// 创建一个类继承ceres::CostFunction类, 重写Evaluate()函数定义residual的计算形式.
// 分别对应marginalization_factor.h, imu_factor.h, projection_factor.h中的MarginalizationInfo, IMUFactor, ProjectionFactor三个类
TicToc t_whole, t_prepare;
vector2double();
//先验
if (last_marginalization_info)
{
// construct new marginlization_factor
MarginalizationFactor *marginalization_factor = new MarginalizationFactor(last_marginalization_info);
problem.AddResidualBlock(marginalization_factor, NULL,
last_marginalization_parameter_blocks);//添加先验残差
}
这里可以去了解一下marginalization_factor的头文件和源文件,
头文件中定义了两个struct,两个类, 创建一个类MarginalizationFactor继承ceres::CostFunction类, 重写Evaluate()函数定义residual的计算形式。
边缘化知识参考: https://blog.csdn.net/weixin_44580210/article/details/95748091
//imu residual
for (int i = 0; i < WINDOW_SIZE; i++)
{
int j = i + 1;
if (pre_integrations[j]->sum_dt > 10.0)
continue;
IMUFactor* imu_factor = new IMUFactor(pre_integrations[j]);
problem.AddResidualBlock(imu_factor, NULL, para_Pose[i], para_SpeedBias[i], para_Pose[j], para_SpeedBias[j]);//添加imu的残差
}
//视觉残差
int f_m_cnt = 0;
int feature_index = -1;
for (auto &it_per_id : f_manager.feature)
{
it_per_id.used_num = it_per_id.feature_per_frame.size();
if (!(it_per_id.used_num >= 2 && it_per_id.start_frame < WINDOW_SIZE - 2))
continue;
++feature_index;
int imu_i = it_per_id.start_frame, imu_j = imu_i - 1;
Vector3d pts_i = it_per_id.feature_per_frame[0].point;
for (auto &it_per_frame : it_per_id.feature_per_frame)
{
imu_j++;
if (imu_i == imu_j)
{
continue;
}
Vector3d pts_j = it_per_frame.point;
if (ESTIMATE_TD)
{
ProjectionTdFactor *f_td = new ProjectionTdFactor(pts_i, pts_j, it_per_id.feature_per_frame[0].velocity, it_per_frame.velocity,
it_per_id.feature_per_frame[0].cur_td, it_per_frame.cur_td,
it_per_id.feature_per_frame[0].uv.y(), it_per_frame.uv.y());
problem.AddResidualBlock(f_td, loss_function, para_Pose[imu_i], para_Pose[imu_j], para_Ex_Pose[0], para_Feature[feature_index], para_Td[0]);//添加视觉残差
/*
double **para = new double *[5];
para[0] = para_Pose[imu_i];
para[1] = para_Pose[imu_j];
para[2] = para_Ex_Pose[0];
para[3] = para_Feature[feature_index];
para[4] = para_Td[0];
f_td->check(para);
*/
}
else
{
ProjectionFactor *f = new ProjectionFactor(pts_i, pts_j);
problem.AddResidualBlock(f, loss_function, para_Pose[imu_i], para_Pose[imu_j], para_Ex_Pose[0], para_Feature[feature_index]);
}
f_m_cnt++;
}
}
ROS_DEBUG("visual measurement count: %d", f_m_cnt);
ROS_DEBUG("prepare for ceres: %f", t_prepare.toc());
//重定位
if(relocalization_info)
{
//printf("set relocalization factor! \n");
ceres::LocalParameterization *local_parameterization = new PoseLocalParameterization();
problem.AddParameterBlock(relo_Pose, SIZE_POSE, local_parameterization);
int retrive_feature_index = 0;
int feature_index = -1;
for (auto &it_per_id : f_manager.feature)
{
it_per_id.used_num = it_per_id.feature_per_frame.size();
if (!(it_per_id.used_num >= 2 && it_per_id.start_frame < WINDOW_SIZE - 2))
continue;
++feature_index;
int start = it_per_id.start_frame;
if(start <= relo_frame_local_index)
{
while((int)match_points[retrive_feature_index].z() < it_per_id.feature_id)
{
retrive_feature_index++;
}
if((int)match_points[retrive_feature_index].z() == it_per_id.feature_id)
{
Vector3d pts_j = Vector3d(match_points[retrive_feature_index].x(), match_points[retrive_feature_index].y(), 1.0);
Vector3d pts_i = it_per_id.feature_per_frame[0].point;
ProjectionFactor *f = new ProjectionFactor(pts_i, pts_j);
problem.AddResidualBlock(f, loss_function, para_Pose[start], relo_Pose, para_Ex_Pose[0], para_Feature[feature_index]);//添加重定位的残差
retrive_feature_index++;
}
}
}
}
//[4]创建一个求解配置参数Option, 定义成DENSE_SCHUR,
// 优化算法用的”dog leg”, 设置最大迭代次数和最大求解时间. 创建一个求解描述Summary, 调用ceres::Solve()进行求解
ceres::Solver::Options options;
options.linear_solver_type = ceres::DENSE_SCHUR;
//options.num_threads = 2;
options.trust_region_strategy_type = ceres::DOGLEG;
options.max_num_iterations = NUM_ITERATIONS;
//options.use_explicit_schur_complement = true;
//options.minimizer_progress_to_stdout = true;
//options.use_nonmonotonic_steps = true;
if (marginalization_flag == MARGIN_OLD)
options.max_solver_time_in_seconds = SOLVER_TIME * 4.0 / 5.0;
else
options.max_solver_time_in_seconds = SOLVER_TIME;
TicToc t_solver;
ceres::Solver::Summary summary;
ceres::Solve(options, &problem, &summary);
//cout << summary.BriefReport() << endl;
ROS_DEBUG("Iterations : %d", static_cast(summary.iterations.size()));
ROS_DEBUG("solver costs: %f", t_solver.toc());
double2vector();
在这个函数中需要去延伸的是factor文件,像是imu_factor.h和intergration_base.h下定义imu的模型,中值积分,残差,信息矩阵,雅克比等,具体的注释,就不给出了。
optimization( )中优化结束之后边缘化部分的代码注释如下:
这个一定要参考 https://blog.csdn.net/weixin_44580210/article/details/95748091 写得非常详细。。
当marg最老帧时,具体操作步骤:
TicToc t_whole_marginalization;
if (marginalization_flag == MARGIN_OLD)//marg最老帧
{
MarginalizationInfo *marginalization_info = new MarginalizationInfo();
vector2double();//ceres中变量必须用数组类型,所以需要进行数据类型转换成我之前一直迷惑的二维数组。。。哈哈哈
//para_Pose(6维,相机位姿)、
//para_SpeedBias(9维,相机速度、加速度偏置、角速度偏置)、
//para_Ex_Pose(6维、相机IMU外参)、
//para_Feature(1维,特征点深度)、
//para_Td(1维,标定同步时间)
//先验误差会一直保存,而不是只使用一次
// 如果上一次边缘化的信息存在
//要边缘化的参数块是 para_Pose[0] para_SpeedBias[0] 以及 para_Feature[feature_index](滑窗内的第feature_index个点的逆深度)
//添加上一次的先验残差
if (last_marginalization_info)
{
vector drop_set;//待marg的优化变量id
for (int i = 0; i < static_cast(last_marginalization_parameter_blocks.size()); i++)//last_marginalization_parameter_blocks是上一轮留下来的残差块
{
if (last_marginalization_parameter_blocks[i] == para_Pose[0] ||
last_marginalization_parameter_blocks[i] == para_SpeedBias[0])//需要marg掉的优化变量,也就是滑窗内第一个变量
drop_set.push_back(i);
}
// 构造边缘化的的Factor
// construct new marginlization_factor
MarginalizationFactor *marginalization_factor = new MarginalizationFactor(last_marginalization_info);
// 添加上一次边缘化的参数块
ResidualBlockInfo *residual_block_info = new ResidualBlockInfo(marginalization_factor, NULL,
last_marginalization_parameter_blocks,
drop_set);
marginalization_info->addResidualBlockInfo(residual_block_info);
}
{
//添加IMU的先验,只包含边缘化帧的IMU测量残差
if (pre_integrations[1]->sum_dt < 10.0)
{
IMUFactor* imu_factor = new IMUFactor(pre_integrations[1]);
ResidualBlockInfo *residual_block_info = new ResidualBlockInfo(imu_factor, NULL,
vector{para_Pose[0], para_SpeedBias[0], para_Pose[1], para_SpeedBias[1]},
vector{0, 1});//其待边缘化变量是para_Pose[0], para_SpeedBias[0],也是第一政相关的变量都作为边缘化的对象
marginalization_info->addResidualBlockInfo(residual_block_info);
}
}
{
//添加视觉的先验,只添加起始帧是旧帧且观测次数大于2的Features
int feature_index = -1;
for (auto &it_per_id : f_manager.feature)// 遍历滑窗内所有的Features
{
it_per_id.used_num = it_per_id.feature_per_frame.size(); // 该特征点被观测到的次数
if (!(it_per_id.used_num >= 2 && it_per_id.start_frame < WINDOW_SIZE - 2)) //Feature的观测次数不小于2次,且起始帧不属于最后两帧
continue;
++feature_index;
int imu_i = it_per_id.start_frame, imu_j = imu_i - 1;
if (imu_i != 0)//只选择被边缘化的帧的Features,在这里是marg最老帧就是滑窗内的第0帧,当这个特征点被观测的起始帧不是第0帧,就不marg.
continue;
Vector3d pts_i = it_per_id.feature_per_frame[0].point;// 得到该Feature在起始帧下的归一化坐标
for (auto &it_per_frame : it_per_id.feature_per_frame)
{
imu_j++;
if (imu_i == imu_j) // 不需要起始观测帧
continue;
Vector3d pts_j = it_per_frame.point;
if (ESTIMATE_TD)
{
ProjectionTdFactor *f_td = new ProjectionTdFactor(pts_i, pts_j, it_per_id.feature_per_frame[0].velocity, it_per_frame.velocity,
it_per_id.feature_per_frame[0].cur_td, it_per_frame.cur_td,
it_per_id.feature_per_frame[0].uv.y(), it_per_frame.uv.y());
ResidualBlockInfo *residual_block_info = new ResidualBlockInfo(f_td, loss_function,
vector{para_Pose[imu_i], para_Pose[imu_j], para_Ex_Pose[0], para_Feature[feature_index], para_Td[0]},
vector{0, 3});//其待边缘化变量是para_Pose[imu_i]和para_Feature[feature_index]位姿和相关的特征点
marginalization_info->addResidualBlockInfo(residual_block_info);
}
else
{
ProjectionFactor *f = new ProjectionFactor(pts_i, pts_j);
ResidualBlockInfo *residual_block_info = new ResidualBlockInfo(f, loss_function,
vector{para_Pose[imu_i], para_Pose[imu_j], para_Ex_Pose[0], para_Feature[feature_index]},
vector{0, 3});
marginalization_info->addResidualBlockInfo(residual_block_info);
}
}
}
}
//将三个ResidualBlockInfo中的参数块综合到marginalization_info中
// 计算所有ResidualBlock(残差项)的残差和雅克比,parameter_block_data是参数块的容器
TicToc t_pre_margin;
marginalization_info->preMarginalize();
ROS_DEBUG("pre marginalization %f ms", t_pre_margin.toc());
TicToc t_margin;
marginalization_info->marginalize();
ROS_DEBUG("marginalization %f ms", t_margin.toc());
//将滑窗里关键帧位姿移位
// 这里是保存了所有状态量的信息
std::unordered_map addr_shift;
for (int i = 1; i <= WINDOW_SIZE; i++)
{
addr_shift[reinterpret_cast(para_Pose[i])] = para_Pose[i - 1];
addr_shift[reinterpret_cast(para_SpeedBias[i])] = para_SpeedBias[i - 1];
}
for (int i = 0; i < NUM_OF_CAM; i++)
addr_shift[reinterpret_cast(para_Ex_Pose[i])] = para_Ex_Pose[i];
if (ESTIMATE_TD)
{
addr_shift[reinterpret_cast(para_Td[0])] = para_Td[0];
}
vector parameter_blocks = marginalization_info->getParameterBlocks(addr_shift);
if (last_marginalization_info)
delete last_marginalization_info;
last_marginalization_info = marginalization_info;
last_marginalization_parameter_blocks = parameter_blocks;
}