电机速度测量
问题提出
各式各样的直流电机
上面三个问题虽然不是在同一天提到的,反映了同学们对于反馈控制中测量环节的重视。需要在众多方案中选择一个性价比最好的方案。
基本原理角速度度测量时空间物体运动(平动、转动)参数测量的重要一方面,是衡量和控制电机运动的最重要的参数。根据角度、角速度、角加速度之间的微分关系,任何能够测量角度、角加速的方法都可以用于测量角速度。

角度、角速度、角加速度之间的关系
下面介绍几种常用的测量角度速度的方法原理。
一、使用角度传感器测速A. 光电码盘:这种形式采用在电机同轴,或者传动轴上安装同步转动的码盘,利用光电管检测码盘转动,输出与转动角度成正比的脉冲个数。有增量式和绝对式码盘之分。常用到的是将码盘与光电检测传感器集成在一起的传感器,可以直接连接单片机IO口或者定时器端口。
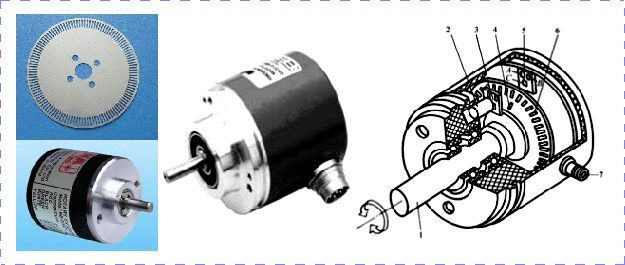
光电编码角度传感器
增量式角度码盘输出信号包括有两路A,B两路正交的脉冲信号和零位Z信号,通过单片机的正交编码定时器可以方便进行正反转向角度测量。对于智能车竞速比赛,通常只有正向速度,所以也可以仅仅使用一路脉冲信号完成速度测量。具体测量硬件和软件内容以后会另文介绍。
B. 霍尔传感器这种角度传感器分为两大类,一类使用开关型霍尔传感器,直接测量电机同轴的永磁铁的极对数,输出相应的开关脉冲。另外一类是使用模拟型霍尔元器件测量电机同轴永磁铁的磁场方向角度。

开关型霍尔速度传感器
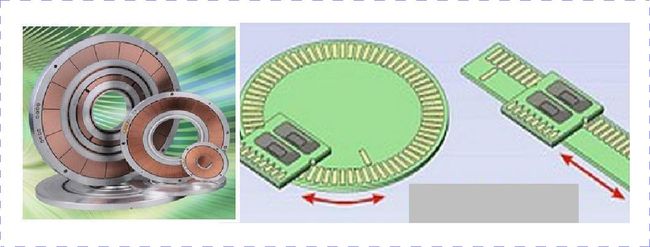
由于永磁铁磁极个数无法制作很多,所以通常开关型霍尔速度传感器需要配合着减速器来增加对于输出角度测量精度。使用特殊半月形圆形磁铁与能够测量两个正交方向磁场强度的霍尔器件配合,可以计算出磁场的角度。通常这类传感器是将霍尔器件、信号调理电路以及数字信号处理电路都集成在一起,可以直接输出SPI、I2C等接口形式的数字角度数据。这类编码器通常可以达到每周12bit的分辨率。
模拟型霍尔角度传感器
为了兼容光电码盘,这类传感器芯片还会输出增量脉冲信号。
C.电磁感应式有一类采用直流发电机原理形式的感应角速度传感器,它直接输出与转速成正比的直流电压信号。
另外一类则采用则采用同步感应器原理的角度传感器。
角度感应同步器
由于电磁感应可以获得与位置相关的相位信息,所以这类感应同步器比光电码盘更高的空间分辨率。此类传感器通常用于精密测量、机械手臂、云台等控制方面。作为速度反馈有点大材小用。
二、利用电机模型测速电机不仅可以完成电能向转动机械能的转换,也可以反过来当做发电机将机械能转换成电能。对于小型直流电机,它发出的电压与转速成正比。因此,电机本身是可以同时当做换能器和速度传感器的。
电机转动产生感应电动势
下面图对使用H桥电路驱动小型直流电机电路进行了简化。其中E是H桥电路输出PWM电压的等效直流电压。Re,Rm分别是H桥电路的内阻、电机等效串联电阻。Lm是电机电枢的电感,这个电感相对比较小,电机转动惯性环节来讲,它所造成的电流过渡过程可以忽略。Um是电机转动后的感应电动势,它近似于电机转速成正比,Um=k×ω。

电机驱动电路的等效电路模型
None
如果忽略电机电感Lm造成的电流稳定的过渡过程,那么根据上述电路模型可以得到:
E=I×(Re+Rm)+Um=I×(Re+Rm )+k×ω
其中E是H桥输出的PWM等效直流电压:
E=Ub×占空比
Ub是H桥电路的母线电压;占空比是由单片机输出PWM的参数决定。所以,E是可控和已知的。如果通过电流采样,可以获得此时电机的工作电流I,那么,单机的转速就可以有下面公式计算而得:
ω=[Ub×占空比 - I ×(Re+Rm)]/k
三、间接测速A.电流波动方法小型直流有刷电机由于存在着换流部件,它会造成流过电流出现换流中断;再加上内部磁钢所产生的磁场不是中心对称,因此在电机转动过程中产生的感应电动势Um出现波动。这都会造成电机工作电流的波动。
小型有刷直流电机内部结构
下图是使用电流霍尔传感器测量得到的电机工作电流波形,可以看出在不同的负载下,电流大小会出现很大的波动。在平均电流值上面叠加了一个与电机转速成正比的波动信号,这就是由于直流电机内部的换流以及磁场不均匀造成的波动。
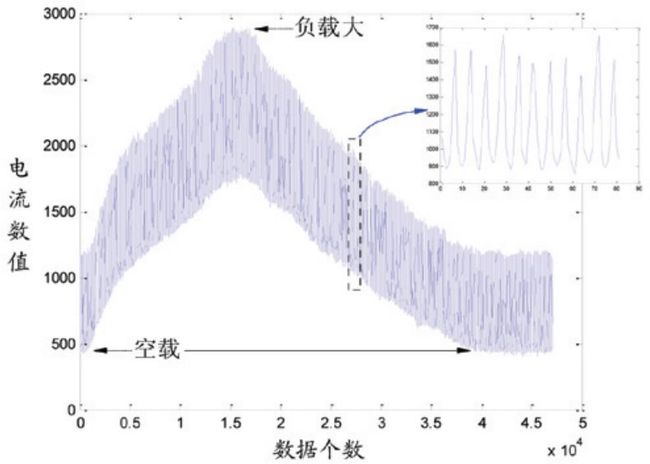
小型直流电机工作电流波形
通过测量这个波动信号的频率可以间接得到电机的转速。
B.测速轮电机的转动通过减速齿轮最终作用在车模轮胎上。如果车轮与地面之间没有滑动,因此车模的行进速度就与电机转速成正比。可以通过固定在一个与车模底盘软连接的支架顶端的一个转动测速轮(实际上是安装有光电码盘的小轮子)来测量车模底盘的行进速度,进而可以得到电机的转速。
由于电机测速最终是用来控制车模行进速度,所以使用测速轮可以准确获得车模行进速度,它不会受到车轮打滑的影响,因此对于控制车模速度更加有力。
问题分析对本文一开始提出的问题做如下分析:
一、是否要测量电机速度?由于车模运行速度会直接影响比赛成绩以及车模在赛道上行进的稳定性,所以需要能够准确控制车模速度。车模行进的动力都来自于车模电机,它的转速会直接影响车模运行速度。如果不进行速度测量,使用速度反馈来控制速度,那么电池电压、车模传动阻力、赛道表面阻力和坡道等各种因素都会影响到车模运行速度。
因此,测量电机速度是实现车模精确控制的必要手段。特别是对于直立车模来讲,电机速度的反馈也决定了车模直立控制的效果。
二、如何选择测量方案?测量电机转速(角度、角加速度)的方法很多,上面所列写的也仅仅是常用到的方法。选择不同测量方案,需要从以下几个方面来考虑:
本文一开始提出的电机速度测量问题
三、智能车竞赛中的测速方案根据往届比赛中参赛队伍方案选择来看,常见到的电机测速有光电编码盘、测速轮方案居多。
由于智能车模属于竞赛比赛,所以对于车模速度测量精度没有太大的要求,实际使用中每圈分辨率在8bit(256线)左右就可以满足要求了。这个结论只是一个经验值。
车模行进过程中,电机实际上都没有达到满负荷,因此电机的性能还是处于线性范围内。所以利用电机模型,通过采集电机工作电流进行输出电压补偿也是可以达到非常好的效果。
对于其中需要测量的系数Rm,Re,Ub,K等可以化简成一个补偿形式,即通过调整一个等效电阻参数Requ,乘以电机工作电流I,去补偿输出PWM的占空比。通过实验的方法,确定Requ来使得规定PWM下,通过电流补偿使得电机的转速基本上不受外部负载的影响。这种方案是最省钱的方法。
实验验证****None实验一:电机感应电动势转动小型直流电动机,测量其输出电刷上的电压,会发现该电压与转速近似成正比。使用电机模型方法就是利用这个原理完成对于电机转速测量的。
直流电机转动后产生感应电动势
真正应用过程中,则是通过测量电机工作电流,乘以等效内阻,再从控制电压中减去上述电阻压降测量到感应电动势。
实验二:小型直流电机PWM控制转速下面实验使用555时基IC电路控制一个大功率MOSFET,产生可调PWM信号,控制电机的转速。
PWM波形控制电机转速
实验中,影响电机转速的一个主要因素是施加在电机两端的等效直流电压。因此改变PWM占空比就可以改变等效直流电压,进而调节电机转速。
上述实验中的电机是空载,工作电流很小。如果电机输出力矩,此时电机的工作电流就会上升,由于等效电阻的存在,使得最终稳定转速就会随着电流的增加而降低。
实验三:测量电机工作电流的波动通过霍尔电流传感器可以测量电机工作电流。通过单片机采集霍尔输出电压信号发送到计算机进行显示和测量。

实际测量电机电流波动信号
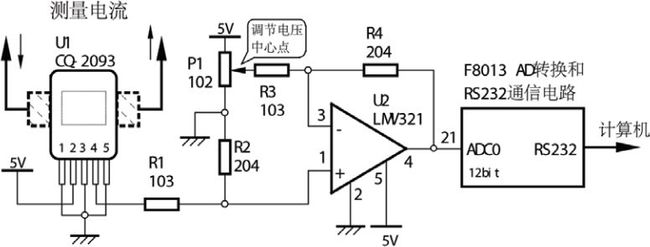
测量电机工作电流电路
下图是通过MATLAB显示所采集到的工作电流波形,可以看出其中包含着呈现周期波动的电流信号。
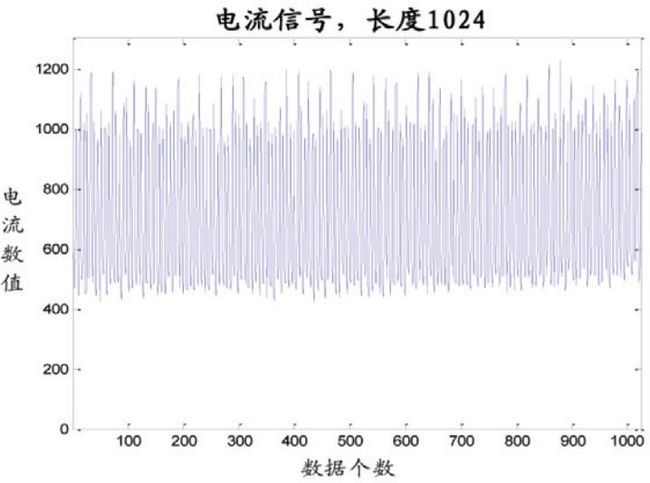
电机工作电流数据曲线
利用傅里叶分析,获得电流信号的频谱,其中存在着明显的谐波分量。最大的一个谐波分量则对应着电机的转速。

电机工作电流信号的频谱分析
电机工作电流波动的频率与电机转速之间的比值等于电机的极对数。常见的有刷直流电机的极对数为1,或者2,可以从电机内磁钢的槽数,或者线圈的个数来获得。
延伸讨论对控制对象参数的测量时进行反馈控制的必要条件。通过反馈控制,可以将一些影响系统运行的干扰、不确定、变化着的因素消除,使得控制对象始终保持着确定的运行性能。所以,反馈控制的一个目的就是用来消除各种不确定的干扰因素。
反馈控制也可以将原来不稳定的系统变成稳定的系统。例如在直立车模比赛中,通过对于车模倾角以及角加速度的反馈控制,便可以保持车模稳定的状态。反馈控制思想不仅在工程中有着重要的应用,还可以扩展到很多其他的领域。测量精度对于控制性能有一定的影响。但此时需要综合考虑到执行器的精度,包括驱动电路的PWM精度、电机以及传动机构的精度、控制要求的精度,在满足要求的情况下,就需要考虑到测量的成本、安装维护方便性以及可靠性等因素。利用对于电机电压、电流的测量,加上电机运行模型来实现电机转速控制是所有方法中最便宜的方案,在实现上也很方便。对于竞速比赛的车模这种方法实际上可以满足比赛的需要。
在现代电机控制中,特别是随着永磁同步电机(PMSM),无刷直流电机(BLDC)推广使用,很多方案就是使用电机模型的方法,通过电机工作电流、电压的观测获得电机转子的位置和转速,进而使用电子驱动电路完成换流。省去了用于测量转子位置的霍尔器件,降低了设备的成本,提高了系统的可靠性。
电机原本内收的不对称性,反过来也可以提供转子的位置信息。上面的工作电流谐波分析获得电机转速的方法,就是这样一种变废为宝的思路。这些都是建立在对于电机工作机制理解和应用的基础之上。活学活用就会创造出很多巧妙新颖的方法,来实现新的突破。
补充提问提问:卓老师您好,我用的编码器是欧姆龙e6a2 cw3c 500线的,接的是1117 5v电源,通过单片机内部上拉之后的波形有很大的毛刺,正交解码好像也没有用,不知道是什么原因造成的呢?
回复:1. 从示波器输出信号来看,信号的幅值好像不够触发单片机的。 2. 信号高电平与低电平不对称; 3. 建议外部使用1~5.1k电阻上拉至单片机工作电源; 4.如果信号的幅度和波形没有改善,考虑是否传感器接错线; 传感器已经损坏。?