Python+Opencv4点仿射变换
目录
- 一、场景需求解读
- 二、算法原理简介
- 三、算法实现步骤
- 四、算法代码实现
- 五、算法效果展示与分析
- 六、思维拓展
- 参考资料
- 注意事项
一、场景需求解读
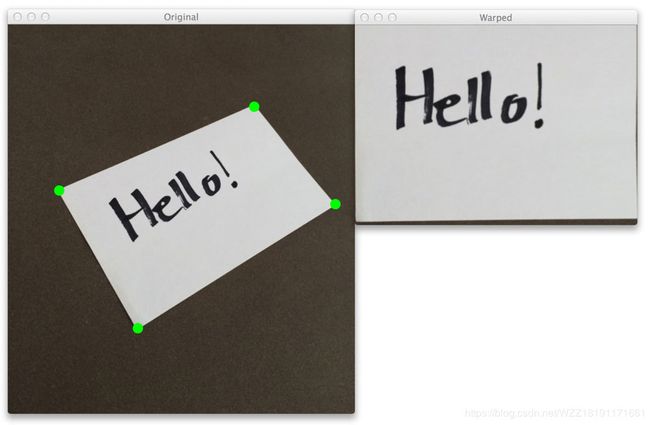
在处理现实生活中的图像处理问题时,我们经常会遇到一种情况-即我们将要处理的目标的位置是斜的,我们需要使用仿射变换进行矫正。当你做了很多现实场景中的案例之后,你就会发现这是一个非常通用的模块,因而本篇博客针对这个问题进行了详细的论述,具体的案例如下图所示,左边表示的是原始的输入图片,该图片中的目标是斜放的,我们要做的任务就是将其矫正过来。
二、算法原理简介
整个算法的原理比较简单,我们的目标是将倾斜的目标矫正过来。首先,我们需要使用轮廓检测等其它方法获取到目标的4个关键点坐标值;然后利用相应的变换关系获取到新的4个坐标点;接着利用这4对关键点计算出仿射变换矩阵M;最后应用仿射变换矩阵到目标中即可。
三、算法实现步骤
步骤1-读取输入图片;
步骤2-获取原始目标的4个坐标点(左上,左下,右上,右下);
步骤3-通过4个坐标点计算出新的坐标点;
步骤4-使用opencv计算仿射变换矩阵M;
步骤5-应用仿射变换进行变换并进行结果显示。
四、算法代码实现
four_point_transform.py
# coding=utf-8
# 导入相应的python包
import numpy as np
import cv2
def order_points(pts):
# 初始化坐标点
rect = np.zeros((4, 2), dtype = "float32")
# 获取左上角和右下角坐标点
s = pts.sum(axis = 1)
rect[0] = pts[np.argmin(s)]
rect[2] = pts[np.argmax(s)]
# 分别计算左上角和右下角的离散差值
diff = np.diff(pts, axis = 1)
rect[1] = pts[np.argmin(diff)]
rect[3] = pts[np.argmax(diff)]
return rect
def four_point_transform(image, pts):
# 获取坐标点,并将它们分离开来
rect = order_points(pts)
(tl, tr, br, bl) = rect
# 计算新图片的宽度值,选取水平差值的最大值
widthA = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2))
widthB = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))
maxWidth = max(int(widthA), int(widthB))
# 计算新图片的高度值,选取垂直差值的最大值
heightA = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2))
heightB = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2))
maxHeight = max(int(heightA), int(heightB))
# 构建新图片的4个坐标点
dst = np.array([
[0, 0],
[maxWidth - 1, 0],
[maxWidth - 1, maxHeight - 1],
[0, maxHeight - 1]], dtype = "float32")
# 获取仿射变换矩阵并应用它
M = cv2.getPerspectiveTransform(rect, dst)
# 进行仿射变换
warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight))
# 返回变换后的结果
return warped
transform_example.py
# coding=utf-8
# 导入相应的python包
from pyimagesearch.transform import four_point_transform
import numpy as np
import argparse
import cv2
# 进行参数设置和参数解析
ap = argparse.ArgumentParser()
ap.add_argument("-i", "--image", help = "path to the image file")
ap.add_argument("-c", "--coords", help = "comma seperated list of source points")
args = vars(ap.parse_args())
# 读取图片
image = cv2.imread(args["image"])
# 获取原始的坐标点
pts = np.array(eval(args["coords"]), dtype = "float32")
# 对原始图片进行变换
warped = four_point_transform(image, pts)
# 结果显示
cv2.imshow("Original", image)
cv2.imshow("Warped", warped)
cv2.waitKey(0)
五、算法效果展示与分析
python transform_example.py --image images/example_01.png --coords "[(73, 239), (356, 117), (475, 265), (187, 443)]"
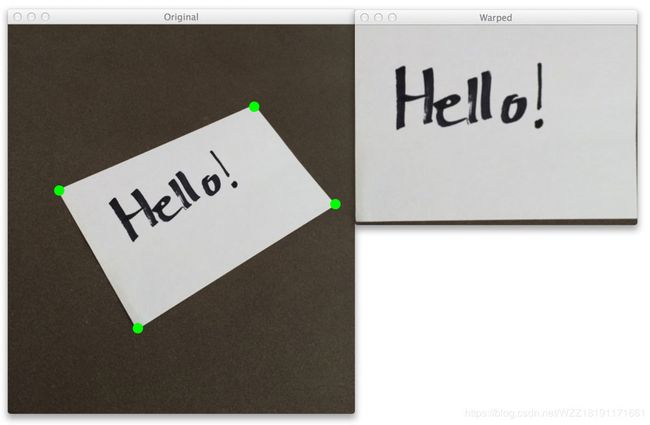
python transform_example.py --image images/example_02.png --coords "[(101, 185), (393, 151), (479, 323), (187, 441)]"
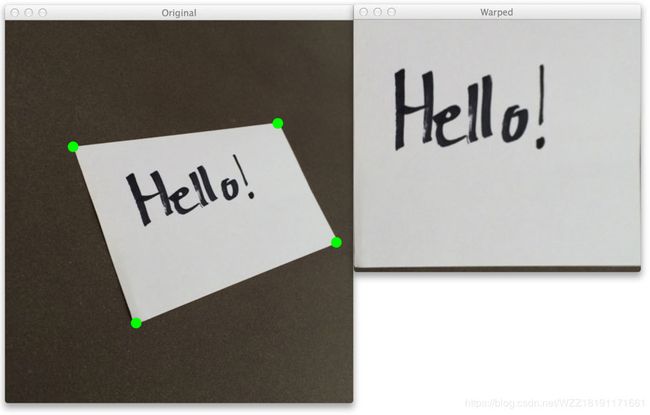
python transform_example.py --image images/example_03.png --coords "[(63, 242), (291, 110), (361, 252), (78, 386)]"

上图展示了不同倾斜角度下的校正结果,通过观察,哦我们可以发现该算法可以很好的对倾斜的目标进行矫正,而且可以获得很好的矫正效果。
六、思维拓展
通过上面的观察,聪明的你可以观察到了一个问题,即这个算法的前提是首先需要准确的获取目标的4个关键点,常用的方法是轮廓获取法;除此之外,测试的图片背景比较单一,而现实场景中的图片背景比较复杂,会存在很多的干扰信息,因而准确的获得目标的4个关键点就成为了一个比较困难的问题。对于下面的一幅图,如何准确的获取图中的白色A4纸并进行仿射矫正呢?

参考资料
[1] 参考链接
注意事项
[1] 该博客是本人原创博客,如果您对该博客感兴趣,想要转载该博客,请与我联系(qq邮箱:[email protected]),我会在第一时间回复大家,谢谢大家的关注.
[2] 由于个人能力有限,该博客可能存在很多的问题,希望大家能够提出改进意见。
[3] 如果您在阅读本博客时遇到不理解的地方,希望您可以联系我,我会及时的回复您,和您交流想法和意见,谢谢。
[4] 本文测试的图片可以通过该链接进行下载。网盘链接- 提取码:p9lg 。
[5] 本人业余时间承接各种本科毕设设计和各种小项目,包括图像处理(数据挖掘、机器学习、深度学习等)、matlab仿真、python算法及仿真等,有需要的请加QQ:1575262785详聊,备注“项目”!!!