超声波测距
超声波是一种频率高于20000赫兹的声波,它的方向性好,穿透能力强,易于获得较集中的声能,在水中传播距离远,可用于测距、测速、清洗、焊接、碎石、杀菌消毒等。在医学、军事、工业、农业上有很多的应用。超声波因其频率下限大于人的听觉上限而得名。此次实验室布置的任务为基于51最小系统;的单片机测距。
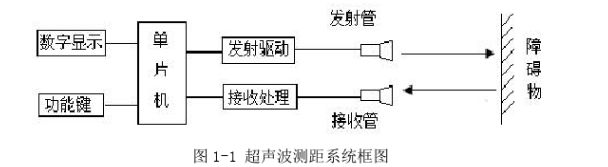
超声波测距原理:单片机发出超声波测距是通过不断检测超声波发射后遇到障碍物所反射的回波,从而测出发射和接收回波的时间差t,然后求出距离。
距离公式:s=ct/2
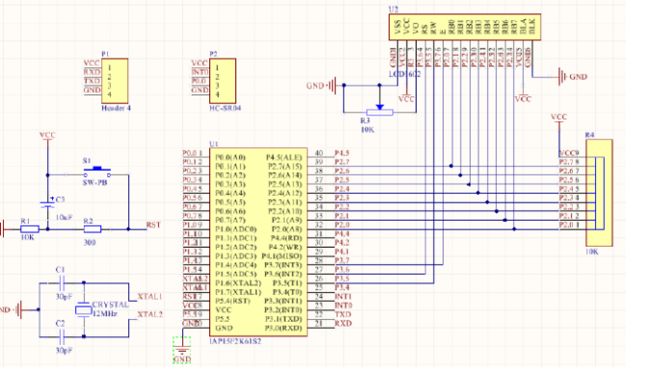
原理图:
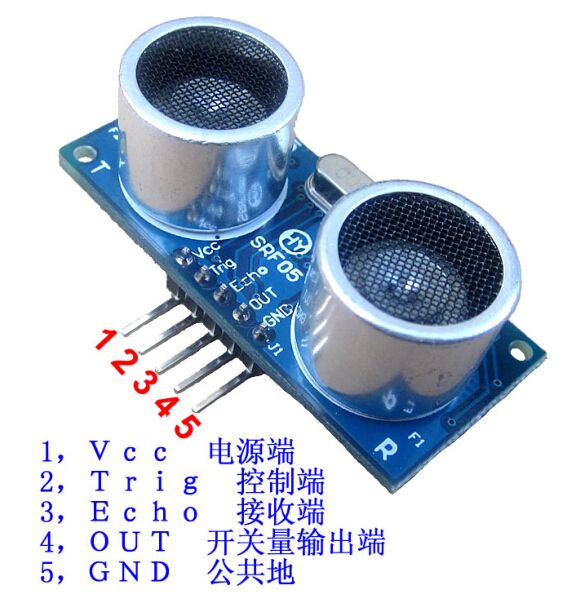
HY-SRF05介绍
1. 模块
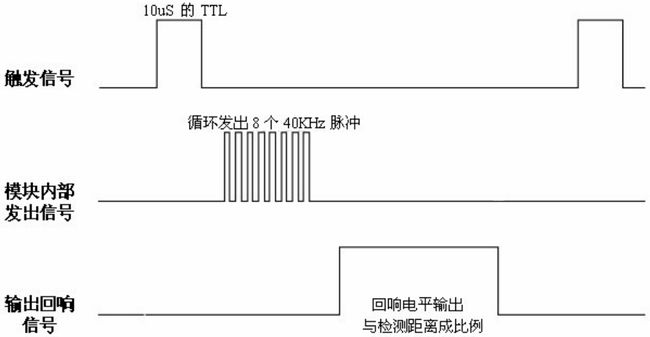
2. 工作原理

3. 时序图
4. 计算公式

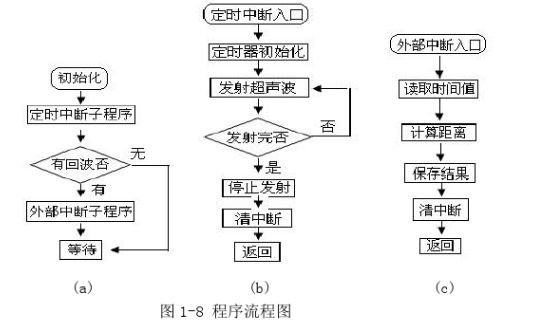
程序流程图:
原理图:
代码如下:
LCD.H
#ifndef __LCD_H_
#define __LCD_H_
/**********************************
当使用的是4位数据传输的时候定义,
使用8位取消这个定义
**********************************/
#define LCD1602_4PINS
/**********************************
包含头文件
**********************************/
#include
//---重定义关键词---//
#ifndef uchar
#define uchar unsigned char
#endif
#ifndef uint
#define uint unsigned int
#endif
/**********************************
PIN口定义
**********************************/
#define LCD1602_DB P0 //data bus 数据总线
sbit LCD1602_RS = P2^6;
sbit LCD1602_RW = P2^5;
sbit LCD1602_EN = P2^7;
/**********************************
函数声明
**********************************/
/*在51单片机12MHZ时钟下的延时函数*/
void Lcd1602_Delay1ms(uint c); //误差 0us
void Read_Busy(); //忙检测函数,判断bit7是0,允许执行;1禁止
void Lcd1602_Write_Cmd(unsigned char cmd); //写命令
void Lcd1602_Write_Data(unsigned char dat); //写数据
void LcdSetCursor(unsigned char x,unsigned char y); //坐标显示
void LcdShowStr(unsigned char x,unsigned char y,unsigned char *str); //显示字符串
void InitLcd1602(); //1602初始化
void DisplayOneChar(unsigned char X, unsigned char Y, unsigned char DData);
#endif
LCD.C
#include"lcd.h"
void Read_Busy() //忙检测函数,判断bit7是0,允许执行;1禁止
{
unsigned char sta; //
LCD1602_DB = 0xff;
LCD1602_RS = 0;
LCD1602_RW = 1;
do
{
LCD1602_EN = 1;
sta = LCD1602_DB;
LCD1602_EN = 0; //使能,用完就拉低,释放总线
}while(sta & 0x80);
}
void Lcd1602_Write_Cmd(unsigned char cmd) //写命令
{
Read_Busy();
LCD1602_RS = 0;
LCD1602_RW = 0;
LCD1602_DB = cmd;
LCD1602_EN = 1;
LCD1602_EN = 0;
}
void Lcd1602_Write_Data(unsigned char dat) //写数据
{
Read_Busy();
LCD1602_RS = 1;
LCD1602_RW = 0;
LCD1602_DB = dat;
LCD1602_EN = 1;
LCD1602_EN = 0;
}
void LcdSetCursor(unsigned char x,unsigned char y) //坐标显示
{
unsigned char addr;
if(y == 0)
addr = 0x00 + x;
else
addr = 0x40 + x;
Lcd1602_Write_Cmd(addr|0x80);
}
//按指定位置显示一个字符
void DisplayOneChar(unsigned char X, unsigned char Y, unsigned char DData)
{
Y &= 0x1;
X &= 0xF; //限制X不能大于15,Y不能大于1
if (Y) X |= 0x40; //当要显示第二行时地址码+0x40;
X |= 0x80; //算出指令码
Lcd1602_Write_Cmd(X); //发命令字
Lcd1602_Write_Data(DData); //发数据
}
void LcdShowStr(unsigned char x,unsigned char y,unsigned char *str) //显示字符串
{
LcdSetCursor(x,y); //当前字符的坐标
while(*str != '\0')
{
Lcd1602_Write_Data(*str++);
}
}
void InitLcd1602() //1602初始化
{
Lcd1602_Write_Cmd(0x38); //打开,5*8,8位数据
Lcd1602_Write_Cmd(0x0c);
Lcd1602_Write_Cmd(0x06);
Lcd1602_Write_Cmd(0x01); //清屏
}主函数:
#include
#include
#include"lcd.h"
sbit Trig = P2^1;
sbit Echo = P2^0;
unsigned char PuZh[]=" Pechin Science ";
unsigned char code ASCII[15] = {'0','1','2','3','4','5','6','7','8','9','.','-','M'};
static unsigned char DisNum = 0; //显示用指针
unsigned int time=0;
unsigned long S=0;
bit flag =0;
unsigned char disbuff[4] ={ 0,0,0,0,};
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void Conut(void)
{
time=TH0*256+TL0;
TH0=0;
TL0=0;
S=(time*1.7)/100; //算出来是CM
if((S>=700)||flag==1) //超出测量范围显示“-”
{
flag=0;
DisplayOneChar(0, 1, ASCII[11]);
DisplayOneChar(1, 1, ASCII[10]); //显示点
DisplayOneChar(2, 1, ASCII[11]);
DisplayOneChar(3, 1, ASCII[11]);
DisplayOneChar(4, 1, ASCII[12]); //显示M
}
else
{
disbuff[0]=S%1000/100;
disbuff[1]=S%1000%100/10;
disbuff[2]=S%1000%10 %10;
DisplayOneChar(0, 1, ASCII[disbuff[0]]);
DisplayOneChar(1, 1, ASCII[10]); //显示点
DisplayOneChar(2, 1, ASCII[disbuff[1]]);
DisplayOneChar(3, 1, ASCII[disbuff[2]]);
DisplayOneChar(4, 1, ASCII[12]); //显示M
}
}
void zd0() interrupt 1 //T0中断用来计数器溢出,超过测距范围
{
flag=1; //中断溢出标志
}
void StartModule() //启动模块
{
Trig=1; //启动一次模块
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
Trig=0;
}
void delayms(unsigned int ms)
{
unsigned char i=100,j;
for(;ms;ms--)
{
while(--i)
{
j=10;
while(--j);
}
}
}
void main(void)
{
TMOD=0x01; //设T0为方式1,GATE=1;
TH0=0;
TL0=0;
ET0=1; //允许T0中断
EA=1; //开启总中断
InitLcd1602();
LcdShowStr(0,0,PuZh);
while(1)
{
StartModule();
while(!Echo); //当RX为零时等待
TR0=1; //开启计数
while(Echo); //当RX为1计数并等待
TR0=0; //关闭计数
Conut(); //计算
delayms(80);
}
}