【OpenCV】基于SIFT/SURF算法的双目视差测距(一)
文章目录
- 基本原理
- 实现步骤
- 程序效果
- sift算法
- surf算法
- 代码
下篇链接: https://blog.csdn.net/qinchang1/article/details/88412058
基本原理
由于本文程序直接使用opencv库,因此对于SIFT和SURF算法的原理不做详细介绍。
简单来说,该两种算法使用特征向量来描述特征点,我们可以通过计算特征向量的距离来匹配两张图中对应的特征点。值得注意的是,SIFT由于计算方法不同,且维度较高,计算速度上较SURF更慢。
下面简单介绍一下双目测距原理,这也是本次实验的关键。
下图是双目摄像头成像示意图,其中P点为目标物体,O1和O2分别为左右摄像头的投影中心,x1和x2分别是目标物体在左右摄像头成像平面上的坐标,f为焦距,T为左右摄像头中心线距离,Z为摄像头投影中心到目标物体的距离。
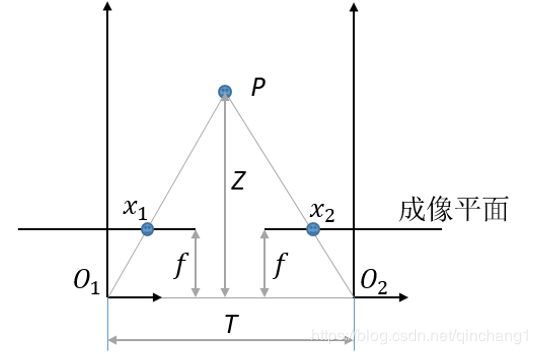
通过计算相似三角形我们可以得到:

其中,
1.(x1-x2)实际上就是视差,单位是实际物理量mm,用D来表示这个视差,并将单位换成像素,多出来的常数放到分子中;
2.分母中的fT是一个常数,我们用K来表示,这里面还可以包括像素单位到mm单位的比例系数。
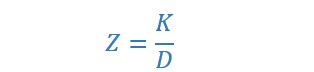
整理一下可以得到:
 .
.
其中,
1.?(mm)为摄像头投影中心到物体的距离;
2.?(像素)为视差,与?1−?2 成比例关系;
3.?(mm*像素)为常数。
*从公式可以看出,距离Z和视差D是成反比例关系的。因此,我们只要得到反比例系数K,就可以通过视差值来计算距离值。

由于双目测距中视差和距离成反比例关系,从上图可以看出:
1.在距离较近的地方,较小的距离变化会引起较大的视差变化;
2.在距离较远的地方,较大的距离变化仅引起较小的视差变化。
因此,双目视差测距有一定的局限性,即在较远或较近的地方效果不会很好。
实现步骤
由于博主假期在家,未带回双目摄像头,因此本次实验使用手机拍摄的照片模拟左右图像,仅实现视差的获取(完整的双目测距下篇文章再续)。
主要步骤:
1、导入左右图像;
2、使用SiftFeatureDetector或SurfFeatureDetector检测关键点(ps:此处为opencv2.4.13版本的检测器,3.0版本之后不太一样);
3、使用SiftDescriptorExtractor或SurfDescriptorExtractor提取各个关键点的描述(特征向量);
4、使用FlannBasedMatcher匹配器进行两图像的关键点匹配(这里面会包含很多错误匹配);
5、计算出所有匹配中的最小distance,筛选出小于两倍最小匹配距离的匹配作为正确的匹配;
6、计算出正确匹配的两特征点的X坐标差,即为该匹配点的像素视差;
7、去除掉偏差值较大的视差,计算视差均值作为最后的结果。
程序效果
输入的左右图像:

sift算法
匹配效果:

匹配点视差数据(显示不全):

筛选后视差结果:

surf算法
匹配效果:

匹配点视差数据:

筛选后视差结果:

ps:两种方法最后计算出来的视差结果差别不大,但是SIFT算法的速度明显慢于SURF很多,不过前者获得的匹配点数量也更多。
代码
#include ps:1.代码中使用的是SURF算法,需要用SIFT的只需要将代码中SurfFeatureDetector和SurfDescriptorExtractor改成SiftFeatureDetector和SiftDescriptorExtractor即可;
2.匹配结果DMatch中存储着匹配点对的索引,分别在DMatch[i].queryIdx和DMatch[i].trainIdx中,这是找到匹配对的关键。
本次仅实现了像素视差的获取,下篇待博主回校后使用双目摄像头来试验实际测距效果。
下篇链接:https://blog.csdn.net/qinchang1/article/details/88412058
如有错误,欢迎指正!