单目相机标定(分别利用ROS和Matlab)
1. ROS中相机标定
1.1 开始之前
做以下准备:
* 一个已知维度的棋盘,下载链接
>注意:8*6 的棋盘代表8*6个节点,也就是说9*7个黑白方块
* 5m*5m 的光线充足的区域
* 可以通过 `ROS` 发布图像的相机
1.2 编译
获得依赖项并编译驱动
rosdep install camera_calibration列出topics,
rostopic list这回列出所有topics,查看是否有 image_raw topic, ROS 缺省的topics一般是以下两种:
/camera/camera_info
/camera/image_raw
1.3 运行校准节点
加载要校准的topic:
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.108 image:=/camera/image_raw camera:=/camera 这条语句会打开校准窗口, 窗口的棋盘会被高亮显示,如下所示:

若不能打开窗口,运行以下语句:
--no-service-check(1.4 双棋盘)
若用多个棋盘,则需要多个`--siz` 和 `--square`参数,同时确保棋盘的维度不同来保证相机可以区分他们。
1.5 移动棋盘
为了更好地校准, 需要在相机前移动棋盘, 例如:
* 把棋盘放到视野的左右前后: X-- 代表视野的左右;Y-- 代表视野的上下; Size-- 代表距离相机的距离,即棋盘大小; skew-- 代表棋盘的倾斜度
* 棋盘应该覆盖大部分视野
* 棋盘向左右前后倾斜
每一步都要举起棋盘直到窗口的棋盘高亮显示为止






当你移动棋盘的过程,你会看到窗口右边的柱不断变长,当`CALIBRATE`按钮变亮时,点击它校准。
这个过程可能会需要一会儿,期间窗口可能会变黑,请耐心等待。

1.6 校准结果
你会在终端窗口看见校准结果(注释里面有参数解释)并在校准窗口看到校准的图片。 
D = [-0.33758562758914146, 0.11161239414304096, -0.00021819272592442094, -3.029195446330518e-05]
K = [430.21554970319971, 0.0, 306.6913434743704, 0.0, 430.53169252696676, 227.22480030078816, 0.0, 0.0, 1.0]
R = [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P = [1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0]
# oST version 5.0 parameters
[image]
width
640
height
480
[narrow_stereo/left]
# 相机内参矩阵
camera matrix
430.215550 0.000000 306.691343
0.000000 430.531693 227.224800
0.000000 0.000000 1.000000
# 相机畸变矩阵
distortion
-0.337586 0.111612 -0.000218 -0.000030 0.0000
# 矫正矩阵,一般为单位矩阵
rectification
1.000000 0.000000 0.000000
0.000000 1.000000 0.000000
0.000000 0.000000 1.000000
# 投影矩阵,即旋转矩阵和平移矩阵
projection
1.000000 0.000000 0.000000 0.000000
0.000000 1.000000 0.000000 0.000000
0.000000 0.000000 1.000000 0.000000
如果你对校准结果满意,点击`COMMIT`按钮, 这回将校准的参数发送到相机永久储存,校准窗口将会退出,同时终端窗口写着:`writing calibration data to ...`
1.7 创建`.yml`文件
之后你可以调用这个文件加载任意相机
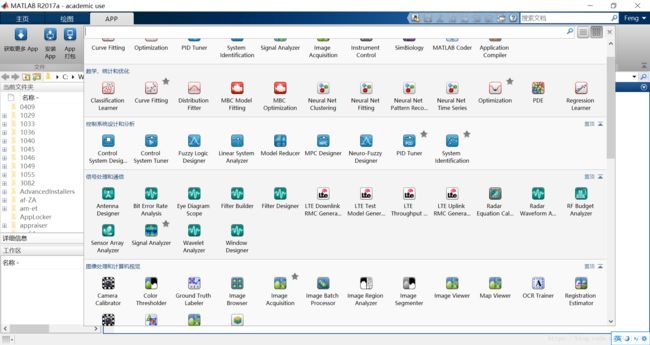
2. Matlab中相机标定
将带有棋盘的图片存储下来
1. 选择Matlab中标定相机的工具,如图左下角所示:
2.2 导入图片
点击Add Images 导入图片,此处可以导入多张图片

设置棋盘格的大小:
导入的图片可能有无效的会被自动检测:

点击窗口上面的Calibrate 的按钮,下图为标定结果

点击右上角Export camera 可以将标定结果显示到命令行窗口:

参考文献
ROS
How to Calibrate a Monocular Camera
Matlab相机标定
相机标定原理