- 1. 感知机原理
- 2. 损失函数
- 3. 优化方法
- 4. 感知机的原始算法
- 5. 感知机的对偶算法
- 6. 从图形中理解感知机的原始算法
- 7. 感知机算法(PLA)的收敛性
- 8. 应用场景与缺陷
- 9. 其他
- 10. 参考资料
1. 感知机原理
感知机是二分类的线性分类模型,本质上想找到一条直线或者分离超平面对数据进行线性划分
- 适用于线性可分的数据集,否则感知机不会收敛
假设有一个数据集\(D = {(x_1, y_1), (x_2, y_2), ..., (x_N, y_N)}\),其中\(x_i \in R^n\),即\(x_i = (x_i^{(1)}, x_i^{(2)}, ...x_i^{(n)})\)
- 模型的输入为实例的特征向量\(x_i\),输出为实例的类别,取值为+1(正例)或者-1(负例)
- 我们希望找到一个分离超平面\(w^Tx + b = 0,其中w \in R^n\),使得有满足\(w^Tx + b > 0\)的实例所对应的类别为正例。而使得满足\(w^Tx + b < 0\)的实例所对应的类别为负例。
于是我们可以构建出感知机模型为:\(f(x) = sign(w^Tx + b)\)
2. 损失函数
定义损失函数一个很自然的想法是建立在误分类点的个数上,但是使用误分类点的个数来构造损失函数并不容易优化
- 因此使用误分类点到分离超平面的总距离来构造损失函数
记M为误分类点的集合,误分类点到分离超平面的总距离为:
不考虑\(\frac{1}{\parallel w \parallel}\)(因为上式中,分子和分母有固定倍数的关系),并且去掉绝对值,就可以得到感知机的损失函数为:
此时对于误分类点,\(-y_i (w^Tx_i + b) > 0\)成立
3. 优化方法
此时感知机算法就转变为,求解参数\(w, b\),使得损失函数极小化,即
因为只有对误分类点才会对损失函数进行优化,因此感知机的优化采用随机梯度下降法(SGD),而非使用所有样本的批量随机梯度下降法(BGD)
损失函数\(L(w, b)\)的梯度为:
对于SGD,选取一个误分类点进行更新,即有:
4. 感知机的原始算法
训练集包括N个样例,样本中包含n个特征,标记为二分类取值为-1或者+1
- 输入的样例:\({(x_1, y_1), (x_2, y_2), ..., (x_N, y_N)}\),学习率:\(\alpha\)
- 输出分离超平面的系数w, b
算法执行步骤如下:
- 初始化w, b以及学习率\(\alpha\)
- 在训练集选取数据\((x_i, y_i)\)
- 如果满足\(-y_i(sign(w^Tx_i + b)) > 0\),则
- 转至2,直到训练集中没有误分类点
5. 感知机的对偶算法
对偶形式的基本想法是,将\(w\)和\(b\)表示为实例\(x_i\)和标记\(y_i\)的线性组合的形式,通过求解它的系数来求解\(w\)和\(b\)
假设初始值\(w_0\)和\(b_0\)都为0,因此\(w\)和\(b\)可以表示成\(x_iy_i\)和\(y_i\)的增量形式,即原始形式可以化成:
其中,\(\beta_i = n_i \alpha\),\(n_i\)表示第\(i\)个实例\(x_i\)更新的次数
此时,模型转变为
训练集包括N个样例,样本中包含n个特征,标记为二分类取值为-1或者+1
- 输入的样例:\({(x_1, y_1), (x_2, y_2), ..., (x_N, y_N)}\),学习率:\(\alpha\)
- 输出分离超平面的系数\(\beta\), b
算法执行步骤如下:
- 初始化\(\beta\), b以及学习率\(\alpha\)
- 在训练集选取数据\((x_i, y_i)\)
- 如果满足\(y_i(sign(\sum_{j=1}^N \beta_j y_j x_j x_i + b)) <= 0\),则
- 转至2,直到训练集中没有误分类点
其中,训练实例可以通过计算Gram矩阵(即\(x_i\)和\(x_j\)的内积组成的矩阵)的形式来存储
6. 从图形中理解感知机的原始算法
为了方便说明,记\(\hat w = (w, b)\),\(\hat x = (x, 1)\),则感知机模型可以变为:
之前我们说明了,只有误分类点才会对\(\hat w\)进行更新。因此,考虑以下两种情况:
-
真实类别为y=+1, 但是模型的输出为-1
- 考虑到\(\hat w^T \hat x = |\hat w||\hat x|cos\theta\)
- 对于真实类别,我们希望说明\(\hat w^T \hat x > 0\),即\(\hat w\)和\(\hat x\)的夹角越小越好,而模型的输出有\(\hat w^T \hat x < 0\),则说明\(\hat w\)和\(\hat x\)的夹角过大
- 因此,我们可以通过减少\(\hat w\)和\(\hat x\)的夹角来达到目的,即有\(\hat w(t+1) = \hat w(t) + \hat x(t)\)(对应着\(w_{t+1} = w_t + \alpha y_i x_i\),且\(\alpha = 1\)的情况)
- \(y_i \hat w_{t+1}^T \hat x_i = y_i \hat w_t^T \hat x_i + y_i \parallel \hat x_i \parallel \geq y_i \hat w_t^T \hat x_i\)

-
真实类别为y=-1, 但是模型的输出为+1
- 考虑到\(\hat w^T \hat x = |\hat w||\hat x|cos\theta\)
- 对于真实类别,我们希望说明\(\hat w^T \hat x < 0\),即\(\hat w\)和\(\hat x\)的夹角越大越好,而模型的输出有\(\hat w^T \hat x > 0\),则说明\(\hat w\)和\(\hat x\)的夹角过小
- 因此,我们可以通过增大\(\hat w\)和\(\hat x\)的夹角来达到目的,即有\(\hat w(t+1) = \hat w(t) - \hat x(t)\)(对应着\(w_{t+1} = w_t - \alpha y_i x_i\),且\(\alpha\) = 1的情况)
- \(y_i \hat w_{t+1}^T \hat x_i = y_i \hat w_t^T \hat x_i - y_i \parallel \hat x_i \parallel = y_i \hat w_t^T \hat x_i + \parallel \hat x_i \parallel \geq y_i \hat w_t^T \hat x_i\)
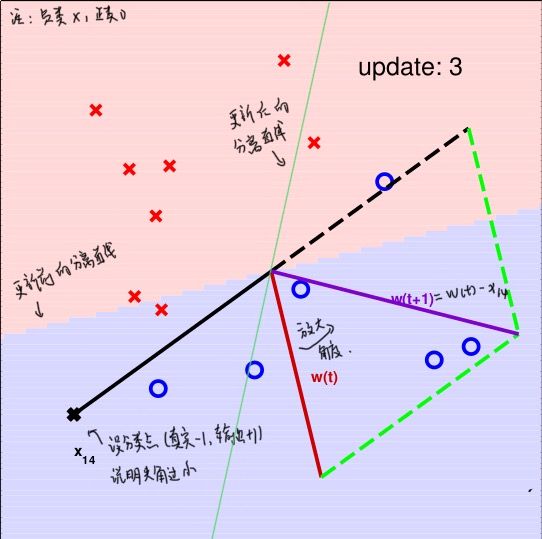
其实,无论对于误分类的情况1还是情况2,总有\(y_i \hat w_{t+1}^T \hat x_i = \geq y_i \hat w_t^T \hat x_i\),因为\(y_i \hat w_t^T \hat x_i\)的符号代表是否分类正确,大小代表分类超平面是否将其“分得很开”,上面的不等式说明了,对于某个误分类点来说,更新后要比更新前要好,算法PLA对该误分类点“学习”了。
7. 感知机算法(PLA)的收敛性
对于线性可分的数据集,总能找到一个或者多个分类超平面能将该数据集划分,这表明了PLA的收敛性。
- 这部分主要参考林轩田的《机器学习基石》,个人觉得讲得要比李航的《统计学习方法》要清晰,虽然证明本质上是一样的
说明两个向量的相似性有很多方法,其中计算两个向量的内积是一种方法。当内积越大,表明两个向量越相似。当然,这需要考虑向量的长度,当模长越大时,向量的内积也会越来越大。
- 符号说明:\(w_f\)代表真实的w,\(w_t\)代表我们找到的w,这里为了符号简洁些,不记成\(\hat w\),但是含义一样,即\(w_f\)和\(w_t\)里面包含\(b\),记学习率\(\alpha = 1\)
-
先讨论\(w_f\)和\(w_t\)的内积,\(w_0\)为0向量
\begin{equation}
\begin{split}
w_f^T w_t & = w_f^T(w_{t-1} + y_ix_i) \\
& = w_f^T w_{t-1} + y_i w_f^T x_i \\
& \geq w_f w_{t-1} + \underset {i} {min} (y_i w_f^T x_i) \\
& \geq w_f w_0 + t \underset {i} {min} (y_i w_f^T x_i) \\
& = t \underset {i} {min} (y_i w_f^T x_i)
\end{split}
\end{equation} -
讨论\(w_f\)和\(w_t\)的模长,由于只有误分类点才更新,所以有\(y_i w_{t}^T x_i \leq 0\)
\begin{equation}
\begin{split}
\parallel w_t \parallel^2 & = \parallel w_{t-1} + y_ix_i \parallel^2 \\
&= \parallel w_{t-1} \parallel^2 + 2y_i w_{t_1}^T x_i + \parallel y_ix_i \parallel^2 \\
& \leq \parallel w_{t-1} \parallel^2 + \parallel x_i \parallel^2 \\
& \leq \parallel w_{t-1} \parallel^2 + \underset {i} {max} \parallel x_i \parallel^2 \\
& \leq \parallel w_{0} \parallel^2 + t \underset {i} {max} \parallel x_i \parallel^2 \\
& = t \underset {i} {max} \parallel x_i \parallel^2
\end{split}
\end{equation} -
讨论\(w_f\)和\(w_t\)的角度
\begin{equation}
\begin{split}
1 \geq cos \theta = \frac{w_f^T w_t}{\parallel w_f \parallel \parallel w_t \parallel} &
\geq \frac{t \underset {i} {min} (y_i w_f^T x_i)}{\parallel w_f \parallel \sqrt{t \underset {i} {max} \parallel x_i \parallel^2}} \\
& = \frac{\sqrt{t} \underset {i} {min} (y_i w_f^T x_i)}{\parallel w_f \parallel \sqrt{\underset {i} {max} \parallel x_i \parallel^2}}
\end{split}
\end{equation} -
化解得到t的关系式
其中,$$R^2 = \underset {i} {max} \parallel x_i \parallel^2, \rho = \frac{\underset {i} {min} (y_i w_f^T x_i)}{\parallel w_f \parallel}$$
由上述不等式说明了,更新次数是有上限的,这也就证明了收敛性
8. 应用场景与缺陷
- 感知机仅限于数据线性可分的情况,对于线性不可分的情况,该算法不收敛。
- 感知机的收敛步数受两类别之间间隔的影响。间隔越小,收敛的步数越大。
9. 其他
从感知机的分类原理中,可以看出满足条件的超平面并不止一个,不同的超平面依赖于参数的初始值。也就是说感知机模型可以有多个解。
- 泛化能力最好的决策超平面
- 能够将两个类型的样本分开
- 能够最大化决策边界附近的两类型之间的距离
当然,感知机也是神经网络的重要基础,因此也可以从神经网络的角度来说明
10. 参考资料
- 李航《统计学习方法》
- 林轩田《机器学习基石》