人脸对齐之Adaptive Wing Loss
论文:Adaptive Wing Loss for Robust Face Alignment via Heatmap Regression
Github: https://github.com/protossw512/AdaptiveWingLoss
ICCV2019
论文贡献:
- 改进了Wing loss,提出了Adaptive Wing loss,实现了前景和背景的误差平衡
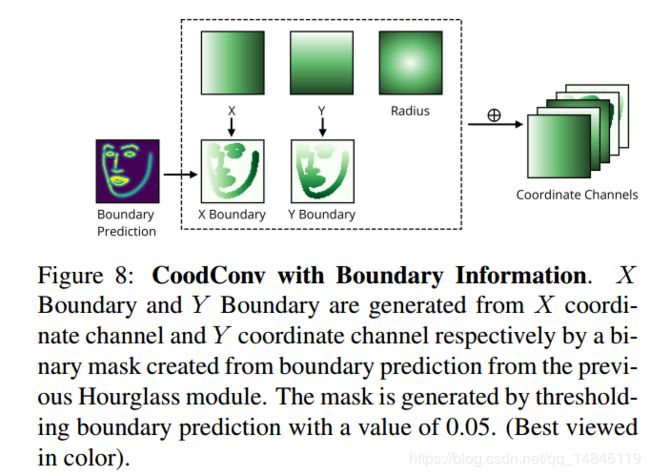
- 提出了编码坐标信息的CoordConv
- 提出了将关键点的边界Boundary和关键点landmark一起训练的思路。
整体网络结构:
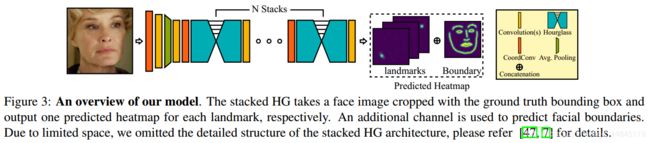
整体模型结构N=4个hourglass模块。输入图像大小为256*256,输出图像大小为64*64。
输入图像为人脸检测得到的图像,会对该图像进行长宽各10%的扩充。
预测的特征图包含c个通道的landmarks和1个通道的boundary。其中,landmarks表示人脸关键点,一个channel预测一个点,boundary表示人脸轮廓的分割的线。Landmarks+boundary一起预测有助于促进网络学习的更好。
传统的Wing loss:
出自论文,Wing Loss for Robust Facial Landmark Localisation with Convolutional Neural Networks
可以参考,https://github.com/TropComplique/wing-loss
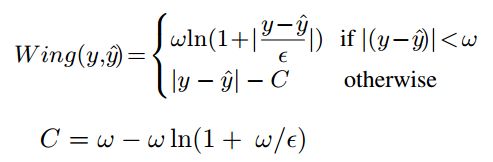
y:groundtruth上的heatmap
y^:预测的heatmap
基于tensorflow 的实现,
import tensorflow as tf
import math
def wing_loss(landmarks, labels, w=10.0, epsilon=2.0):
"""
Arguments:
landmarks, labels: float tensors with shape [batch_size, num_landmarks, 2].
w, epsilon: a float numbers.
Returns:
a float tensor with shape [].
"""
with tf.name_scope('wing_loss'):
x = landmarks - labels
c = w * (1.0 - math.log(1.0 + w/epsilon))
absolute_x = tf.abs(x)
losses = tf.where(
tf.greater(w, absolute_x),
w * tf.log(1.0 + absolute_x/epsilon),
absolute_x - c
)
loss = tf.reduce_mean(tf.reduce_sum(losses, axis=[1, 2]), axis=0)
return loss
改进版Adaptive Wing loss:
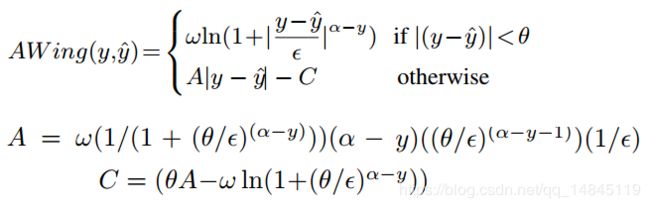
w:正数,等于14
θ:正数,等于0.5
e:正数,等于1
α :大于2的数,等于 2.1

基于pytorch的实现,
import torch
import torch.nn as nn
import matplotlib.pyplot as plt
class AWing(nn.Module):
def __init__(self, alpha=2.1, omega=14, epsilon=1, theta=0.5):
super().__init__()
self.alpha = float(alpha)
self.omega = float(omega)
self.epsilon = float(epsilon)
self.theta = float(theta)
def forward(self, y_pred , y):
lossMat = torch.zeros_like(y_pred)
A = self.omega * (1/(1+(self.theta/self.epsilon)**(self.alpha-y)))*(self.alpha-y)*((self.theta/self.epsilon)**(self.alpha-y-1))/self.epsilon
C = self.theta*A - self.omega*torch.log(1+(self.theta/self.epsilon)**(self.alpha-y))
case1_ind = torch.abs(y-y_pred) < self.theta
case2_ind = torch.abs(y-y_pred) >= self.theta
lossMat[case1_ind] = self.omega*torch.log(1+torch.abs((y[case1_ind]-y_pred[case1_ind])/self.epsilon)**(self.alpha-y[case1_ind]))
lossMat[case2_ind] = A[case2_ind]*torch.abs(y[case2_ind]-y_pred[case2_ind]) - C[case2_ind]
return lossMat
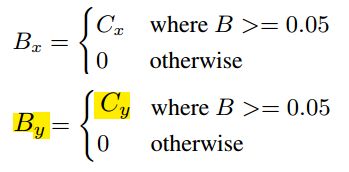
Weighted loss map:

其中,W = 10
这样设置loss,可以使得前景(经过高斯处理的关键点位置)获得比背景区域更大的loss传递。
基于pytorch的实现,
class Loss_weighted(nn.Module):
def __init__(self, W=10, alpha=2.1, omega=14, epsilon=1, theta=0.5):
super().__init__()
self.W = float(W)
self.Awing = AWing(alpha, omega, epsilon, theta)
def forward(self, y_pred , y, M):
M = M.float()
Loss = self.Awing(y_pred,y)
weighted = Loss * (self.W * M + 1.)
return weighted.mean()其中,M的产生如下,
def generate_weight_map(weight_map,heatmap):
k_size = 3
dilate = ndimage.grey_dilation(heatmap ,size=(k_size,k_size))
weight_map[np.where(dilate>0.2)] = 1
return weight_map
Coordinate aggregation:
其他:
本文的方法,人脸关键点的检测也可以应用于人体关键点的检测,也会有不错的效果。

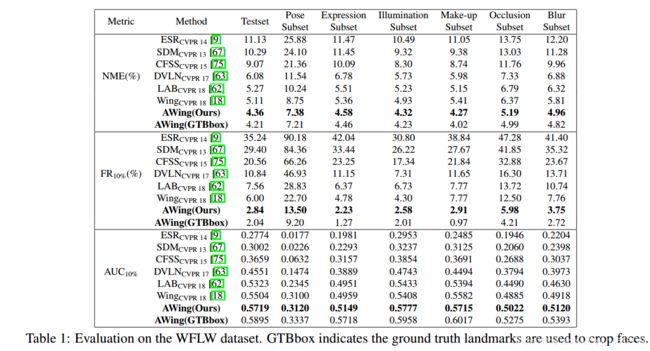
实验结果:
总结:
- 基于heatmap的关键点预测的方法精度会远高于基于回归的方法。缺点就是最后的参数量大。
- Adaptive Wing loss可以应用于好多关键点回归的程序,比如人体关键点回归的。
- Weighted Loss Map有助于使得前景回传更大的loss,背景传递更小的loss,使得训练效果更好。
- CoordConv更像一种attention机制,有助于网络学习到更好的效果。
- Boundary和landmark的相互促进作用。