PCL经典代码赏析八:PCL 点云曲面重建与点云配准
文章目录
- 更新:2019年8月
- 说明
- 目录索引
- 最小二乘法对点云进行平滑处理
- 在平面模型上提取凸(凹)多边形
- 无序点云的快速三角化
- PCL 点云配准
- 逐步匹配多幅点云(未实现)
更新:2019年8月
为了促进同行业人员(特指 LiDAR 点云处理人员或相近行业)的技术交流,解决平时开发过程中遇到的技术性问题,博主建立一个QQ群,欢迎大家积极加入,共同引领点云行业的快速发展 ~
群名:LiDAR点云部落
群号:190162198
说明
- 以下均为 Being_young 前辈所写,现转载过来,再加上自己的理解,重新写了一遍,方便自己日后使用
- 博客地址:http://blog.csdn.net/u013019296/article/
目录索引
- 最小二乘法对点云进行平滑处理
- 在平面模型上提取凸(凹)多边形
- 无需点云的快速三角化
- PCL 点云配准
- 逐步匹配多幅点云(未实现)
最小二乘法对点云进行平滑处理
在测量较小的数据时会产生一些误差,这些误差所造成的不规则数据如果直接拿来曲面重建的话,会使得重建的曲面不光滑或者有漏洞,可以采用对数据重采样来解决这样问题,通过对周围的数据点进行高阶多项式插值来重建表面缺少的部分
#include 在平面模型上提取凸(凹)多边形
先从点云中提取平面模型,再通过该估计的平面模型系数从滤波后的点云投影一组点集形成点云,最后为投影后的点云计算其对应的二维凸多边形
#include 无序点云的快速三角化
使用贪婪投影三角化算法对有向点云进行三角化,具体方法是:
- 先将有向点云投影到某一局部二维坐标平面内
- 在坐标平面内进行平面内的三角化
- 根据平面内三位点的拓扑连接关系获得一个三角网格曲面模型.
贪婪投影三角化算法原理:
处理一系列可以使网格“生长扩大”的点(边缘点),延伸这些点直到所有符合几何正确性和拓扑正确性的点都被连上。该算法可以用来处理来自一个或者多个扫描仪扫描到得到并且有多个连接处的散乱点云。但是算法也是有很大的局限性,它更适用于采样点云来自表面连续光滑的曲面,且点云的密度变化比较均匀的情况
#include PCL 点云配准
在逆向工程,计算机视觉,文物数字化等领域中,由于点云的不完整,旋转错位,平移错位等,使得要得到的完整的点云就需要对局部点云进行配准,为了得到被测物体的完整数据模型,需要确定一个合适的坐标系,将从各个视角得到的点集合并到统一的坐标系下形成一个完整的点云,然后就可以方便进行可视化的操作,这就是点云数据的配准。
点云的配准有手动配准依赖仪器的配准,和自动配准,点云的自动配准技术是通过一定的算法或者统计学规律,利用计算机计算两块点云之间错位,从而达到两块点云自动配准的效果。其实质就是把不同的坐标系中测得到的数据点云进行坐标系的变换,以得到整体的数据模型。问题的关键是如何得到坐标变换的参数R(旋转矩阵)和T(平移向量),使得两视角下测得的三维数据经坐标变换后的距离最小。
目前配准算法按照过程可以分为整体配准和局部配准。PCL中有单独的配准模块,实现了配准相关的基础数据结构和经典的配准算法,如ICP等。
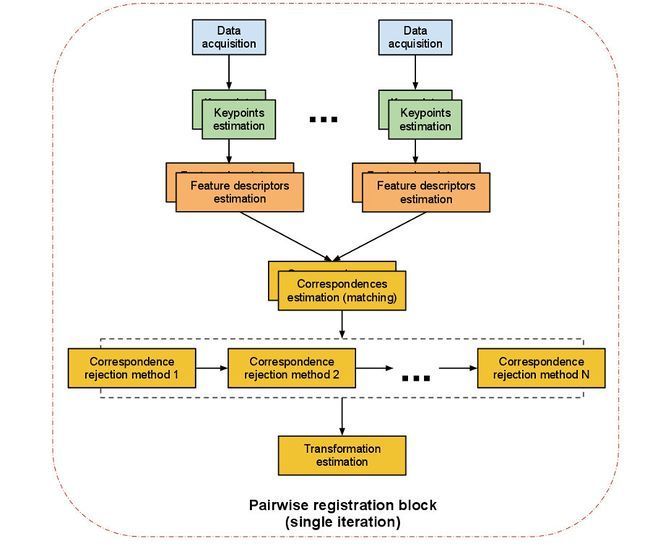
两两配准:一对点云数据集的配准问题是两两配准(pairwise registration 或 pair-wise registration)。通常通过一个估计得到的平移矩阵和的4*4的变换矩阵使得一个点云的数据集精确的与另一个点云数据集(目标数据集)进行完美的配准。具体的实现步骤是:
- 首先从两个数据集中按照同样的关键点选取的标准,提取关键点
- 对选择所有的关键点分别计算其特征描述子
- 结合特征描述子在两个数据集中的坐标位置,以两者之间的特征和位置的相似度为基础,来估算它们的对应关系,初步得到估计对应点对
- 假设数据是有噪声,除去对配准有影响的错误的对应点对
- 利用剩余的正确的对应关系来估算刚体变换,完整配准
对应估计(correspondences estimation):假设我们已经得到由扫描的点云数据获得的两组特征向量,在此基础上,我们必须找到相似特征,再确定数据的重叠部分,然后才能进行配准,根据特征的类型PCL使用不同的方法来搜索特征之间的对应关系
使用点匹配时,使用点的XYZ的坐标作为特征值,针对有序点云和无序点云数据的不同的处理策略:
- 穷举配准(brute force matching)
- kd——数最近邻查询(FLANN)
- 在有序点云数据的图像空间中查找
- 在无序点云数据的索引空间中查找
- 对应关系的去除(correspondence rejection)
由于噪声的影响,通常并不是所有估计的对应关系都是正确的。由于错误的对应关系对于最终的刚体变换矩阵的估算会产生负面的影响,所以必须去除它们,可以采用随机采样一致性估计,或者其他方法剔除错误的对应关系,最终只使用一定比例的对应关系,这样既能提高变换矩阵的估计精度,也可以提高配准点的速度。
变换矩阵的估算(transormation estimation)的步骤如下:
- 在对应关系的基础上评估一些错误的度量标准
- 在摄像机位姿(运动估算)和最小化错误度量标准下估算一个刚体变换
- 优化点的结构
- 使用刚体变换把源旋转/平移到与目标所在的同一坐标系下,用所有点,点的一个子集或者关键点运算一个内部的ICP循环
- 进行迭代,直到符合收敛性判断标准为止。
迭代最近点算法(ICP,Iterative CLosest Point):对需要拼接的2片点云,首先根据一定的准则确立对应点集P与Q,确定对应点对的个数,然后通过最小二乘法迭代计算最优的坐标变换,即旋转矩阵R和平移矢量t,使得误差函数最小,ICP处理流程分为四个主要的步骤:
- 对原始点云数据进行采样
- 确定初始对应点集
- 去除错误对应点对
- 坐标变换的求解
#include 共享指针,并初始化它们
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_in (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_out (new pcl::PointCloud<pcl::PointXYZ>);
// 随机填充点云
cloud_in->width = 5; //设置点云宽度
cloud_in->height = 1; //设置点云为无序点
cloud_in->is_dense = false;
cloud_in->points.resize (cloud_in->width * cloud_in->height);
for (size_t i = 0; i < cloud_in->points.size (); ++i)
{
cloud_in->points[i].x = 1024 * rand () / (RAND_MAX + 1.0f);
cloud_in->points[i].y = 1024 * rand () / (RAND_MAX + 1.0f);
cloud_in->points[i].z = 1024 * rand () / (RAND_MAX + 1.0f);
}
std::cout << "Saved " << cloud_in->points.size () << " data points to input:"//打印处点云总数
<< std::endl;
for (size_t i = 0; i < cloud_in->points.size (); ++i) std::cout << " " << //打印处实际坐标
cloud_in->points[i].x << " " << cloud_in->points[i].y << " " <<
cloud_in->points[i].z << std::endl;
*cloud_out = *cloud_in;
std::cout << "size:" << cloud_out->points.size() << std::endl;
//实现一个简单的点云刚体变换,以构造目标点云
for (size_t i = 0; i < cloud_in->points.size (); ++i)
cloud_out->points[i].x = cloud_in->points[i].x + 0.7f;
std::cout << "Transformed " << cloud_in->points.size () << " data points:"
<< std::endl;
for (size_t i = 0; i < cloud_out->points.size (); ++i) //打印构造出来的目标点云
std::cout << " " << cloud_out->points[i].x << " " <<
cloud_out->points[i].y << " " << cloud_out->points[i].z << std::endl;
pcl::IterativeClosestPoint<pcl::PointXYZ, pcl::PointXYZ> icp; //创建IterativeClosestPoint的对象
icp.setInputCloud(cloud_in); //cloud_in设置为点云的源点
icp.setInputTarget(cloud_out); //cloud_out设置为与cloud_in对应的匹配目标
pcl::PointCloud<pcl::PointXYZ> Final; //存储经过配准变换点云后的点云
icp.align(Final); //打印配准相关输入信息
std::cout << "has converged:" << icp.hasConverged() << " score: " <<
icp.getFitnessScore() << std::endl;
std::cout << icp.getFinalTransformation() << std::endl;
return (0);
}
刚开始,如果直接通过通过kinect 得到数据运行会出现如下的错误,是因为该ICP 算法不能处理含有NaNs的点云数据,所以需要通过移除这些点,才能作为ICP算法的输入。所以我们必须通过之前所学的代码把其中的无效的点云去除,然后作为输入。
逐步匹配多幅点云(未实现)
本实例是使用迭代最近点算法,逐步实现地对一系列点云进行两两匹配,他的思想是对所有的点云进行变换,使得都与第一个点云统一坐标系中,在每个连贯的有重叠的点云之间找出最佳的变换,并积累这些变换到全部的点云,能够进行ICP算法的点云需要粗略的预匹配(比如在一个机器人的量距内或者在地图的框架内),并且一个点云与另一个点云需要有重叠的部分。
#include [*]" , argv[0]);
PCL_ERROR ("[*] - multiple files can be added. The registration results of (i, i+1) will be registered against (i+2), etc");
return (-1);
}
PCL_INFO ("Loaded %d datasets.", (int)data.size ());
// 创建PCL可视化对象
p = new pcl::visualization::PCLVisualizer (argc, argv, "Pairwise Incremental Registration example");
p->createViewPort (0.0, 0, 0.5, 1.0, vp_1); //用左半窗口创建视口vp_1
p->createViewPort (0.5, 0, 1.0, 1.0, vp_2); //用右半窗口创建视口vp_2
PointCloud::Ptr result (new PointCloud), source, target;
Eigen::Matrix4f GlobalTransform = Eigen::Matrix4f::Identity (), pairTransform;
for (size_t i = 1; i < data.size (); ++i) //循环处理所有点云
{
source = data[i-1].cloud; //连续配准
target = data[i].cloud; // 相邻两组点云
showCloudsLeft(source, target); //可视化为配准的源和目标点云
//调用子函数完成一组点云的配准,temp返回配准后两组点云在第一组点云坐标下的点云
PointCloud::Ptr temp (new PointCloud);
PCL_INFO ("Aligning %s (%d) with %s (%d).\n", data[i-1].f_name.c_str (), source->points.size (), data[i].f_name.c_str (), target->points.size ());
// pairTransform返回从目标点云target到source的变换矩阵
pairAlign (source, target, temp, pairTransform, true);
//把当前两两配准后的点云temp转化到全局坐标系下返回result
pcl::transformPointCloud (*temp, *result, GlobalTransform);
//用当前的两组点云之间的变换更新全局变换
GlobalTransform = GlobalTransform * pairTransform;
//保存转换到第一个点云坐标下的当前配准后的两组点云result到文件i.pcd
std::stringstream ss;
ss << i << ".pcd";
pcl::io::savePCDFile (ss.str (), *result, true);
}
}
/* ]--- */
如果观察不到结果,就按键R来重设摄像头,调整角度可以观察到有红绿两组点云显示在窗口的左边,红色为源点云,将看到上面的类似结果,命令行提示需要执行配准按下Q,按下后可以发现左边的窗口不断的调整点云,其实是配准过程中的迭代中间结果的输出,在迭代次数小于设定的次数之前,右边会不断刷新最新的配准结果,直到收敛,迭代次数30次完成整个匹配的过程,再次按下Q后会看到存储的1.pcd文件,此文件为第一个和第二个点云配准后与第一个输入点云在同一个坐标系下的点云。